course
Linjär algebra för datavetenskap i R
4 timmar
21.2K
Att beräkna determinanten för en 3×3-matris – eller något större – är inte lika rakt på sak som fallet 2×2.
Du kan inte bara korsmultiplicera två diagonaler. När matrisen blir större blir aritmetiken rörigare. Utan en strukturerad metod är det lätt att tappa bort sig. Det är precis den typen av problem som kofaktorexpansion – även kallad Laplace-expansion – är avsedd att lösa.
Kofaktorexpansion är en metod för att beräkna determinanten för en godtycklig kvadratisk matris genom att expandera längs en vald rad eller kolumn. Den bryter ned problemet rekursivt till mindre determinanter som du redan vet hur man löser.
I den här artikeln går jag igenom definitionen av kofaktorexpansion, formeln bakom, steg-för-steg-exempel för 2×2- och 3×3-matriser, viktiga egenskaper och praktiska tillämpningar.
Kofaktorexpansion är en rekursiv metod för att beräkna determinanten för en kvadratisk matris.
I det här sammanhanget betyder ”rekursiv” att du i stället för att beräkna determinanten för en stor matris på en gång bryter ned den i mindre determinanter. Dessa mindre determinanter bryts ned i ännu mindre. Du fortsätter tills du har 2×2-matriser kvar, som är triviala att lösa.
Det här fungerar för alla kvadratiska matriser – 2×2, 3×3, 4×4 och uppåt. Det är dock mest användbart för 3×3 och större, där du inte kan korsmultiplicera två diagonaler.
Grundidén är enkel. Du väljer en enda rad eller kolumn i din matris och expanderar längs den. Varje element i den raden eller kolumnen bidrar med ett mindre delproblem. Lös varje delproblem, kombinera resultaten och du har din determinant. Klart.
Innan du kan expandera en determinant behöver du förstå två byggstenar: minorer och kofaktorer.
Minorn M_ij är determinanten av den mindre matris du får när du tar bort rad i och kolumn j från ursprungsmatrisen.
Säg att du har en 3×3-matris A och vill ha minorn M_12. Ta bort rad 1 och kolumn 2. Det som blir kvar är en 2×2-matris. Beräkna dess determinant – det är din minor.
Kofaktorn C_ij tar minorn ett steg längre. Den applicerar en teckensfaktor baserat på positionen (i, j):

Kofaktorn
Termerna (-1)^(i+j) behåller antingen minorns tecken eller vänder det, beroende på var du befinner dig i matrisen.
När i + j är jämnt, (-1)^(i+j) = +1, så kofaktorn är lika med minorn. När i + j är udda, (-1)^(i+j) = -1, så kofaktorn byter tecken på minorn.
Denna teckenväxling skapar ett schackbrädemönster över matrisen:
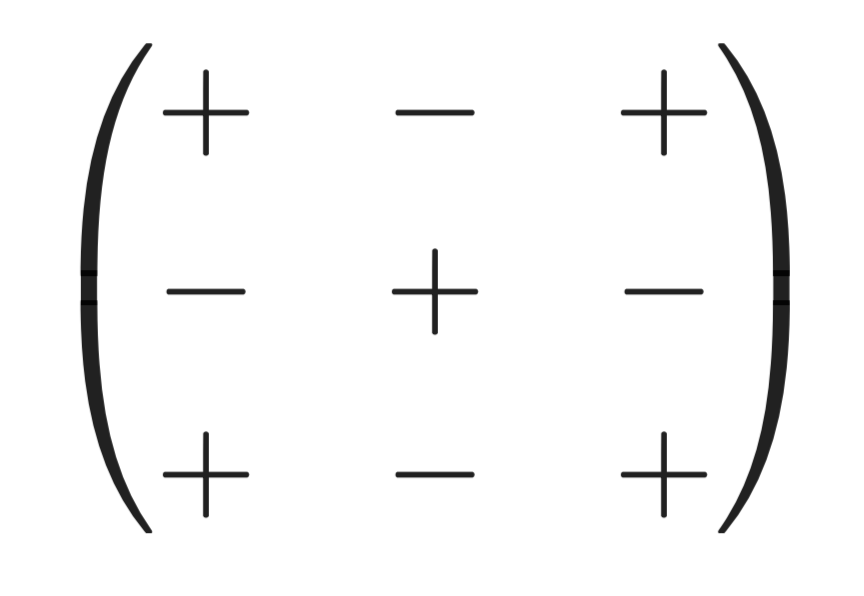
Schackbrädemönstret
Övre vänstra hörnet börjar alltid med +. Därifrån alternerar tecknen i alla riktningar. Mönstret visar direkt om en kofaktor kommer att adderas till eller subtraheras från din determinant.
Här är formeln du har väntat på.
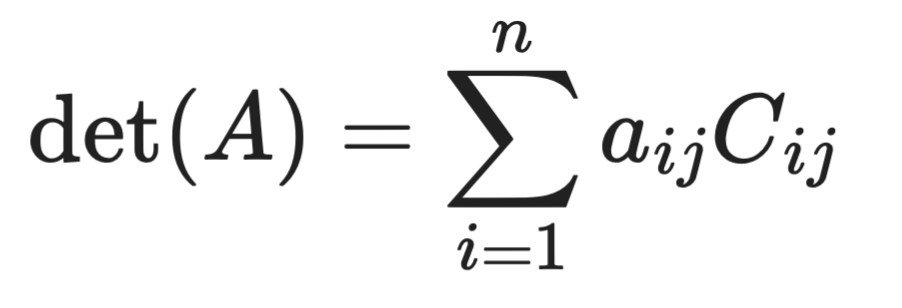
För expansion längs rad i:
Expansion längs rad i
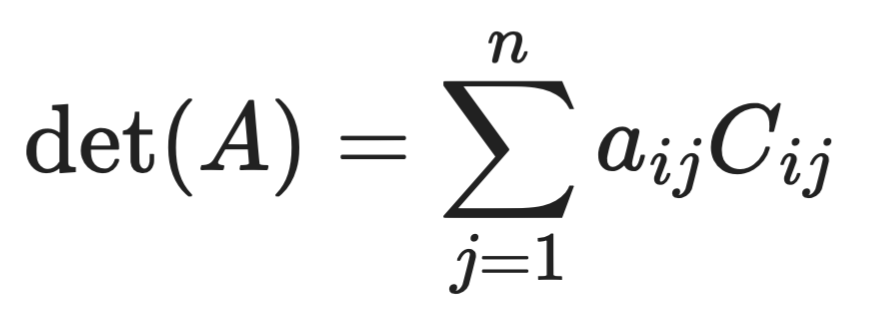
För expansion längs kolumn j:
Expansion längs kolumn j
På vanlig svenska betyder det att du multiplicerar varje element i din valda rad eller kolumn med sin kofaktor och sedan summerar allt.
Termerna a_ij är helt enkelt matrisens enskilda element. Termerna C_ij är kofaktorerna du beräknar för varje position. Multiplicera dem, summera resultaten och du har din determinant.
Det spelar ingen roll vilken rad eller kolumn du väljer. Expansion längs rad 1 ger samma resultat som expansion längs rad 3 eller kolumn 2. Determinanten är en fast egenskap hos matrisen – expansionsvägen är bara ditt val.
Det valet påverkar dock hur mycket arbete du gör. En rad eller kolumn med fler nollor innebär färre kofaktorer att beräkna. Om en rad har två nollor och tre icke-noll-element behöver du bara beräkna kofaktorer för de tre – nollorna bidrar inte till summan. Skanna alltid matrisen efter nollor innan du väljer rad eller kolumn för expansion.
Kofaktorexpansion följer samma tre steg varje gång.
Steg 1: Välj en rad eller kolumn. Skanna matrisen och välj raden eller kolumnen med flest nollor. Färre icke-noll-element innebär färre kofaktorer att beräkna.
Steg 2: För varje icke-noll-element i den raden eller kolumnen:
Beräkna minorn M_ij – ta bort rad i och kolumn j och ta sedan determinanten av det som är kvar.
Applicera teckensfaktorn (-1)^(i+j) med hjälp av schackbrädemönstret för att få kofaktorn C_ij.
Multiplicera elementet a_ij med sin kofaktor C_ij.
Steg 3: Summera alla produkter.

Determinanten
Det är din determinant.
Om någon av dina delmatriser är större än 2×2, upprepa samma process på dem tills du är nere på 2×2-determinanter – som du kan lösa direkt med ad - bc.
Låt oss knyta ihop allt med det enklaste möjliga fallet.
Ta denna 2×2-matris:
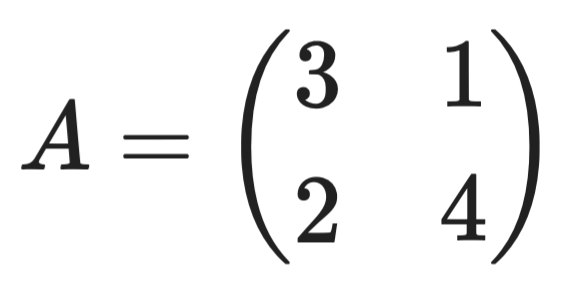
Exempel på 2x2-matris
Expandera längs rad 1. De två elementen är a_11 = 3 och a_12 = 1.
För a_11 = 3: ta bort rad 1 och kolumn 1. Det som blir kvar är bara (4). Teckensfaktorn är (-1)^(1+1) = +1. Alltså är C_11 = +4.
För a_12 = 1: ta bort rad 1 och kolumn 2. Det som blir kvar är bara (2). Teckensfaktorn är (-1)^(1+2) = -1. Alltså är C_12 = -2.
Summera nu produkterna:
![]()
Determinantberäkning
Du märker att detta stämmer med standardformeln för 2×2, ad - bc = (3)(4) - (1)(2) = 10. Kofaktorexpansion och genvägen med korsmultiplikation är två sätt att få samma svar.
Nu jobbar vi igenom ett komplett 3×3-exempel.
Ta denna matris:
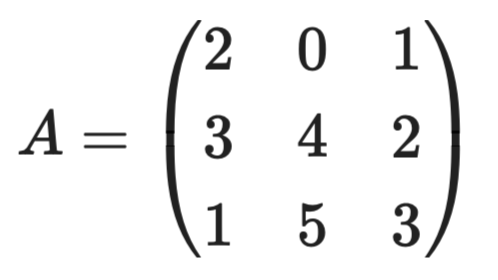
Exempel på 3x3-matris
Rad 1 har en nolla i position (1,2), så vi expanderar längs rad 1. Den nollan innebär att vi helt kan hoppa över en kofaktor.

Uppställning av expansion (1)
Eftersom a_12 = 0 faller mittentermen bort:

Uppställning av expansion (2)
Vi behöver bara beräkna två kofaktorer. Det är belöningen för att välja rätt rad.
Ta nu bort rad 1 och kolumn 1. Det här är vad som blir kvar:

Första beräkningen
Tecknet i position (1,1) är (-1)^(1+1) = +1, så C_11 = +2.
Nästa steg är att ta bort rad 1 och kolumn 3. Detta blir kvar:
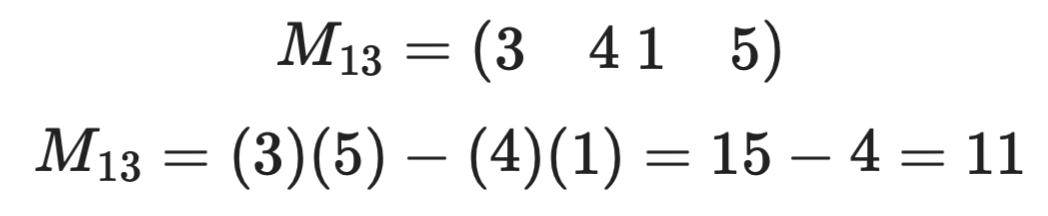
Andra beräkningen
Tecknet i position (1,3) är (-1)^(1+3) = +1, så C_13 = +11.
![]()
Determinantberäkning
Det är din determinant. Genom att välja raden med en nolla från början gjorde du om ett problem med tre kofaktorer till ett med två. Arbeta alltid smartare.
Raden eller kolumnen du väljer ändrar inte resultatet, men den ändrar hur mycket arbete du gör.
Titta alltid efter nollor först. Varje nolla i din valda rad eller kolumn är en kofaktor du slipper beräkna. I 3×3-exemplet ovan minskade en nolla arbetet från tre kofaktorer till två. I större matriser kan en rad med flera nollor spara dig från att beräkna flera deldeterminanter.
Här är några punkter som är värda att komma ihåg
Detta blir viktigare ju större din matris är. En naiv kofaktorexpansion på en n×n-matris kör i faktor i ell tid – vilket betyder att en 4×4 kräver att man beräknar determinanter för fyra 3×3-matriser, som var och en expanderar till tre 2×2-matriser. Det är 24 enskilda beräkningar innan du ens börjar summera. För en 5×5 är det 120.
För stora matriser är kofaktorexpansion inte rätt verktyg. Radreduktion och LU-faktorisering hanterar stora matriser mycket snabbare. Kofaktorexpansion lämpar sig bäst för 2×2- och 3×3-fall, eller för teoretiskt arbete där du behöver uttrycka determinanten symboliskt.
För allt du löser för hand, lägg några sekunder på att leta efter raden eller kolumnen med flest nollor innan du börjar. Det är det enklaste sättet att minska räknefel.
Kofaktorexpansion har en inbyggd rekursiv struktur.
För att hitta determinanten för en n×n-matris expanderar du längs en rad eller kolumn och beräknar determinanter av (n-1)×(n-1) matriser. Var och en av dessa expanderar till (n-2)×(n-2)-matriser. Du fortsätter att reducera tills du når 2×2-matriser, som du löser direkt.
Denna rekursiva egenskap är det som definierar determinanten algebraiskt. Den talar om vad en determinant är i varje matrisstorlek, inte bara hur man beräknar en.
Rekursion har dock en kostnad.
Varje nivå av expansion multiplicerar antalet delproblem, och för stora matriser växer beräkningen snabbt. Det är därför numeriska bibliotek inte använder kofaktorexpansion under huven. Radreduktion och faktoriseringsmetoder skalar mycket bättre.
För små matriser och teoretiskt arbete är den rekursiva strukturen precis vad du vill ha. För allt större är det bättre att söka en annan metod.
Kofaktorer är byggstenen i matrisinversion. De används inte bara för att hjälpa dig beräkna determinanter.
Om du beräknar kofaktorn C_ij för varje element i en matris A får du en kofaktormatris C. Ta transponatet av den – byt plats på rader och kolumner – och du får den adjungerade matrisen:
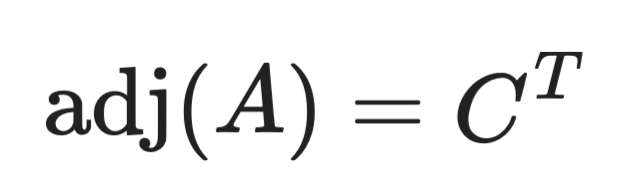
Den adjungerade matrisen
Därifrån följer matrisinversen direkt:
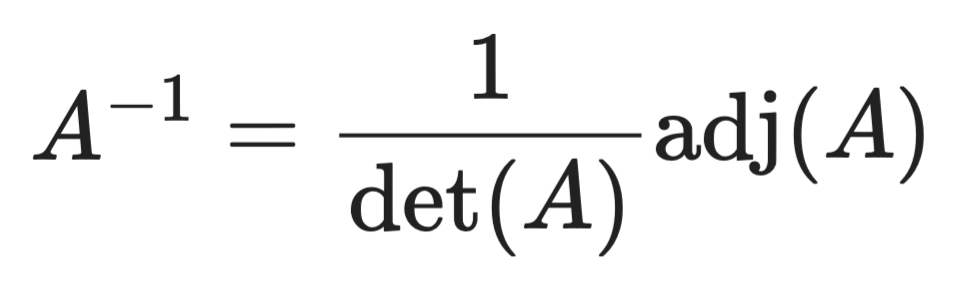
Matrisinvers
Enkelt uttryckt betyder det att du måste beräkna alla kofaktorer, ordna dem i en matris, transponera den och sedan dividera med determinanten. Det är din invers.
Det finns två saker att komma ihåg här:
det(A) ≠ 0 – en noll-determinant betyder att matrisen saknar inversOm du undrar över kopplingen till kofaktorexpansion, kom bara ihåg att varje element i den adjungerade matrisen kommer från en kofaktor du skulle beräkna under expansionen. Samma process som ger dig determinanten ger dig också allt du behöver för att invertera matrisen.
Kofaktorexpansion har några egenskaper som är värda att känna till. De sparar dig från att tvivla på ditt arbete och hjälper dig att upptäcka genvägar.
Här är fyra egenskaper att komma ihåg:
k skalar determinanten också med k. Detta följer direkt av hur kofaktorer multipliceras in i varje elementDessa egenskaper är det som låter dig förenkla matriser före expansion – reducera rader, upptäcka beroenden och undvika onödiga beräkningar.
Kofaktorexpansion har några fallgropar som återkommer gång på gång. Här är vad du ska se upp för.
(-1)^(i+j). Detta är det vanligaste misstaget. Du beräknar minorn korrekt, multiplicerar med elementet och får fel svar för att du hoppade över teckensfaktorn. Kontrollera alltid schackbrädemönstret innan du skriver ned en kofaktorM_ij tar du bort rad i och kolumn j – raden och kolumnen för elementet du expanderar på. Ett vanligt misstag är att ta bort fel, särskilt i en 3×3 där återstoden kan se liknande ut mellan olika borttagningarad - bc direktOm ditt slutliga svar ser fel ut är teckenmönstret och borttagningen för minorn de två första sakerna att dubbelkolla.
Kofaktorexpansion är rätt verktyg i några specifika situationer.
För små matriser är det det mest direkta tillvägagångssättet. En 2×2 är trivial, och en 3×3 är hanterbar för hand på ett par minuter. När du kommer till 4×4 och större växer antalet rekursiva steg så snabbt att andra metoder blir snabbare och mindre felbenägna.
Det är också förstahandsvalet för teoretiskt och symboliskt arbete. Om du arbetar igenom ett bevis, härleder en formel eller beräknar en determinant med variabeltermer i stället för tal, ger kofaktorexpansion ett exakt symboliskt uttryck att arbeta med. Radreduktion är utmärkt för tal, men blir rörigt med symboler.
Här är en snabb sammanfattning av när du ska använda den:
För stora numeriska matriser: hoppa över den. Radreduktion och LU-faktorisering hanterar de fallen mycket snabbare och med betydligt mindre risk för ackumulerade räknefel. De flesta numeriska bibliotek använder dessa metoder under huven just därför.
Kofaktorexpansion bör ses som ett verktyg för handberäkning och teori, inte som en allmän algoritm.
Kofaktorexpansion ger dig ett systematiskt, rekursivt sätt att beräkna determinanten för en kvadratisk matris av godtycklig storlek.
De två byggstenarna – minorerna och teckenmönstret (-1)^(i+j) – driver hela processen. Får du dem rätt är resten enkelt. Välj en rad eller kolumn med nollor för att minska arbetet, reducera till 2×2-determinanter och summera resultaten.
Utöver determinanter har metoden koppling till den adjungerade matrisen och formeln för matrisinversion. De kofaktorer du beräknar under expansionen är samma som bygger adj(A) – vilket gör kofaktorexpansion till en grund för att förstå hur matrisinversion fungerar algebraiskt.
För små matriser och teoretiskt arbete är det den mest transparenta metoden som finns. För stora numeriska matriser bör du välja radreduktion eller ett numeriskt bibliotek.
Om du vill se kofaktorexpansion i praktiken, anmäl dig till vår Linear Algebra for Data Science in R-kurs.
Lär dig med DataCamp
course
course
course