Kurs
Lineare Algebra für Data Science in R
4 Std.
21.2K
Die Determinante einer 3×3-Matrix – oder größer – zu berechnen, ist nicht so geradlinig wie im 2×2-Fall.
Du kannst nicht einfach zwei Diagonalen kreuzweise multiplizieren. Je größer die Matrix, desto unübersichtlicher wird die Rechnung. Ohne eine systematische Methode verlierst du schnell den Überblick. Genau für dieses Problem wurde die Kofaktorexpansion – auch Laplace-Entwicklung genannt – entwickelt.
Die Kofaktorexpansion ist eine Methode, um die Determinante beliebiger quadratischer Matrizen zu berechnen, indem entlang einer gewählten Zeile oder Spalte entwickelt wird. Das Problem wird rekursiv in kleinere Determinanten zerlegt, die du bereits berechnen kannst.
In diesem Artikel erfährst du die Definition der Kofaktorexpansion, die zugrunde liegende Formel, Schritt-für-Schritt-Beispiele für 2×2- und 3×3-Matrizen, wichtige Eigenschaften und praktische Anwendungsfälle.
Die Kofaktorexpansion ist eine rekursive Methode zur Berechnung der Determinante einer beliebigen quadratischen Matrix.
„Rekursiv" bedeutet hier: Anstatt die Determinante einer großen Matrix auf einmal zu berechnen, zerlegst du sie in kleinere Determinanten. Diese werden wiederum in noch kleinere zerlegt. Du fährst fort, bis nur noch 2×2-Matrizen übrig sind – die sind trivial mit einer Formel zu lösen.
Das funktioniert für jede quadratische Matrix – 2×2, 3×3, 4×4 und darüber hinaus. Am nützlichsten ist es jedoch für 3×3 und größer, wo du nicht einfach zwei Diagonalen kreuzweise multiplizieren kannst.
Die Grundidee ist simpel: Du wählst eine einzelne Zeile oder Spalte deiner Matrix und entwickelst entlang dieser. Jedes Element in dieser Zeile oder Spalte steuert ein kleineres Teilproblem bei. Löse jedes Teilproblem, kombiniere die Ergebnisse – und du hast deine Determinante.
Bevor du eine Determinante entwickeln kannst, musst du zwei Bausteine verstehen: Minor und Kofaktor.
Der Minor M_ij ist die Determinante der kleineren Matrix, die entsteht, wenn du aus der Ausgangsmatrix Zeile i und Spalte j streichst.
Angenommen, du hast eine 3×3-Matrix A und willst den Minor M_12 bestimmen. Streiche Zeile 1 und Spalte 2. Übrig bleibt eine 2×2-Matrix. Deren Determinante ist dein Minor.
Der Kofaktor C_ij geht einen Schritt weiter: Er wendet je nach Position (i, j) einen Vorzeichenfaktor an:

Der Kofaktor
Der Term (-1)^(i+j) erhält das Vorzeichen des Minors oder kehrt es um – je nach Position in der Matrix.
Ist i + j gerade, gilt (-1)^(i+j) = +1, der Kofaktor entspricht also dem Minor. Ist i + j ungerade, gilt (-1)^(i+j) = -1, der Kofaktor kehrt das Vorzeichen des Minors um.
Dieser Wechsel der Vorzeichen erzeugt ein Schachbrettmuster über die Matrix hinweg:
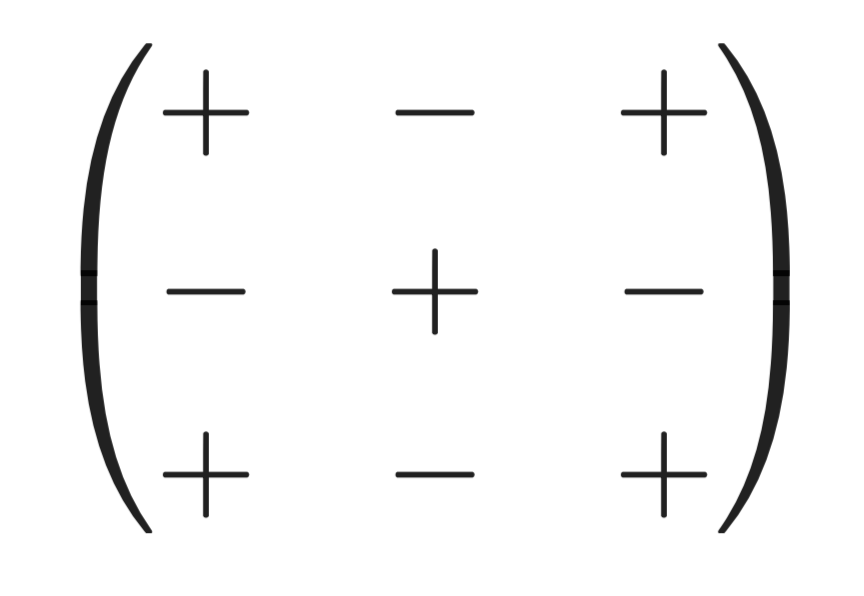
Das Schachbrettmuster
Oben links steht immer ein +. Von dort wechseln die Vorzeichen in alle Richtungen. So siehst du sofort, ob ein Kofaktor zur Determinante addiert oder subtrahiert wird.
Hier ist die Formel, auf die du gewartet hast.
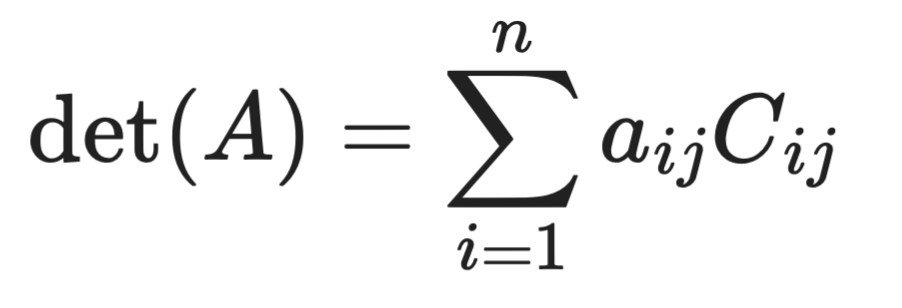
Für die Entwicklung entlang Zeile i:
Entwicklung entlang Zeile i
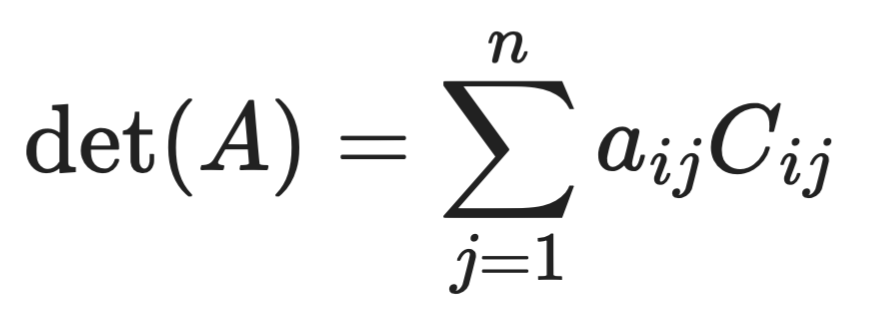
Für die Entwicklung entlang Spalte j:
Entwicklung entlang Spalte j
Einfach gesagt: Du multiplizierst jedes Element in der gewählten Zeile oder Spalte mit seinem Kofaktor und addierst anschließend alles.
Die a_ij sind die einzelnen Matrixeinträge. Die C_ij sind die dazu gehörigen Kofaktoren. Multipliziere sie, summiere die Produkte – das ergibt die Determinante.
Welche Zeile oder Spalte du wählst, spielt für das Ergebnis keine Rolle. Entwicklung entlang Zeile 1 liefert dasselbe Resultat wie entlang Zeile 3 oder Spalte 2. Die Determinante ist eine feste Eigenschaft der Matrix – der Entwicklungsweg ist deine Wahl.
Diese Wahl beeinflusst aber den Aufwand. Eine Zeile oder Spalte mit mehr Nullen bedeutet weniger zu berechnende Kofaktoren. Hat eine Zeile zwei Nullen und drei von null verschiedene Elemente, berechnest du nur diese drei Kofaktoren – die Nullen tragen nichts zur Summe bei. Scanne vorab immer nach Nullen, bevor du dich für Zeile oder Spalte entscheidest.
Die Kofaktorexpansion folgt immer demselben 3-Schritte-Prozess.
Schritt 1: Wähle eine Zeile oder Spalte. Suche die Zeile oder Spalte mit den meisten Nullen. Je weniger von null verschiedene Elemente, desto weniger Kofaktoren sind zu berechnen.
Schritt 2: Für jedes von null verschiedene Element in dieser Zeile oder Spalte:
Berechne den Minor M_ij – streiche Zeile i und Spalte j und bestimme die Determinante der verbleibenden Matrix.
Wende den Vorzeichenfaktor (-1)^(i+j) mithilfe des Schachbrettmusters an und erhalte so den Kofaktor C_ij.
Multipliziere das Element a_ij mit seinem Kofaktor C_ij.
Schritt 3: Summiere alle Produkte.

Die Determinante
Das ist deine Determinante.
Wenn eine der verbleibenden Untermatrizen größer als 2×2 ist, wiederhole den Vorgang, bis du bei 2×2-Determinanten angekommen bist – die löst du direkt mit ad - bc.
Verbinden wir alles am einfachsten Fall.
Betrachte diese 2×2-Matrix:
Beispiel einer 2x2-Matrix
Entwickle entlang Zeile 1. Die beiden Elemente sind a_11 = 3 und a_12 = 1.
Für a_11 = 3: Streiche Zeile 1 und Spalte 1. Übrig bleibt (4). Der Vorzeichenfaktor ist (-1)^(1+1) = +1. Also ist C_11 = +4.
Für a_12 = 1: Streiche Zeile 1 und Spalte 2. Übrig bleibt (2). Der Vorzeichenfaktor ist (-1)^(1+2) = -1. Also ist C_12 = -2.
Jetzt die Produkte aufsummieren:
![]()
Berechnung der Determinante
Du siehst: Das entspricht der Standardformel für 2×2, ad - bc = (3)(4) - (1)(2) = 10. Kofaktorexpansion und die Kreuzmultiplikations-Abkürzung führen zum selben Ergebnis.
Jetzt ein vollständiges 3×3-Beispiel.
Betrachte diese Matrix:
Beispiel einer 3x3-Matrix
Zeile 1 hat an Position (1,2) eine Null, also entwickeln wir entlang Zeile 1. Diese Null erspart uns einen ganzen Kofaktor.

Aufbau der Entwicklung (1)
Da a_12 = 0 ist, fällt der mittlere Term weg:

Aufbau der Entwicklung (2)
Wir müssen nur zwei Kofaktoren berechnen. Das ist der Lohn für die kluge Zeilenwahl.
Jetzt streiche Zeile 1 und Spalte 1. Das bleibt übrig:

Erste Berechnung
An Position (1,1) gilt (-1)^(1+1) = +1, also C_11 = +2.
Als Nächstes streiche Zeile 1 und Spalte 3. Das bleibt übrig:
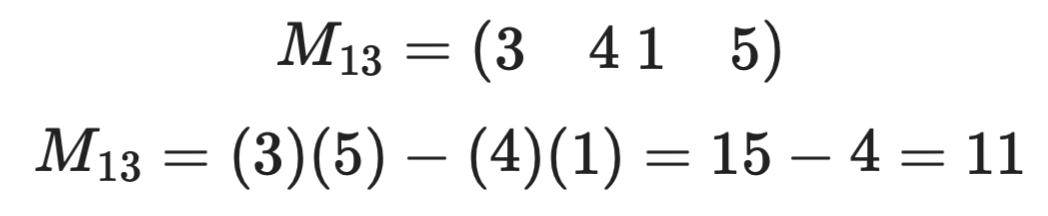
Zweite Berechnung
An Position (1,3) gilt (-1)^(1+3) = +1, also C_13 = +11.
![]()
Berechnung der Determinante
Das ist deine Determinante. Durch die Wahl einer Zeile mit einer Null hast du ein Drei-Kofaktoren-Problem zu einem mit zwei Kofaktoren gemacht. Arbeite immer smart.
Welche Zeile oder Spalte du auswählst, ändert nicht das Ergebnis, wohl aber den Aufwand.
Suche immer zuerst nach Nullen. Jede Null in deiner gewählten Zeile oder Spalte ist ein Kofaktor weniger. Im obigen 3×3-Beispiel reduzierte eine Null die Arbeit von drei auf zwei Kofaktoren. In größeren Matrizen spart eine Zeile mit mehreren Nullen gleich mehrere Untersummen.
Hier sind ein paar Merksätze:
Das wird umso wichtiger, je größer die Matrix wird. Eine naive Kofaktorexpansion für eine n×n-Matrix läuft faktoriell – eine 4×4 erfordert vier 3×3-Determinanten, von denen jede in drei 2×2-Determinanten zerfällt. Das sind 24 Einzelrechnungen, bevor du überhaupt mit dem Addieren beginnst. Bei 5×5 sind es 120.
Für große Matrizen ist die Kofaktorexpansion nicht das richtige Werkzeug. Zeilenreduktion und LU-Zerlegung sind hier deutlich schneller. Nutze die Kofaktorexpansion vor allem für 2×2- und 3×3-Fälle oder für theoretische Zwecke, wenn du die Determinante symbolisch ausdrücken musst.
Wenn du per Hand rechnest, nimm dir ein paar Sekunden, um nach der Zeile oder Spalte mit den meisten Nullen zu suchen. So reduzierst du Rechenfehler am einfachsten.
Die Kofaktorexpansion hat eine eingebaute rekursive Struktur.
Um die Determinante einer n×n-Matrix zu finden, entwickelst du entlang einer Zeile oder Spalte und berechnest Determinanten der (n-1)×(n-1) -Matrizen. Jede davon zerfällt wiederum in (n-2)×(n-2)-Matrizen. Du reduzierst weiter, bis nur noch 2×2-Matrizen übrig sind, die du direkt löst.
Diese rekursive Eigenschaft definiert die Determinante auch algebraisch. Sie sagt dir, was eine Determinante in jeder Matrixgröße ist – nicht nur, wie man sie berechnet.
Rekursion hat jedoch ihren Preis.
Jede Ebene der Entwicklung vervielfacht die Anzahl der Teilprobleme, und bei großen Matrizen wächst der Aufwand rasant. Darum nutzen numerische Bibliotheken unter der Haube keine Kofaktorexpansion. Zeilenreduktion und Faktorisierungen skalieren deutlich besser.
Für kleine Matrizen und in der Theorie ist die rekursive Struktur genau das Richtige. Für alles Größere solltest du eine andere Methode wählen.
Kofaktoren sind der Baustein der Matrixinversion. Sie helfen nicht nur bei Determinanten.
Berechnest du für jedes Element einer Matrix A den Kofaktor C_ij, erhältst du die Kofaktormatrix C. Nimmst du davon die Transponierte – vertauscht also Zeilen und Spalten –, erhältst du die Adjunktenmatrix:
Die Adjunktenmatrix
Daraus folgt die Inverse direkt:
Matrixinverse
Konkret bedeutet das: Du berechnest alle Kofaktoren, ordnest sie zu einer Matrix, transponierst sie und teilst dann durch die Determinante. Das ergibt die Inverse.
Zwei Dinge solltest du dir merken:
det(A) ≠ 0 – ist die Determinante null, besitzt die Matrix keine InverseWenn du dich fragst, wie das mit der Kofaktorexpansion zusammenhängt: Jeder Eintrag der Adjunktenmatrix stammt aus einem Kofaktor, den du bei der Entwicklung berechnest. Der gleiche Prozess, der die Determinante liefert, liefert auch alles Nötige für die Inversion.
Die Kofaktorexpansion bringt ein paar nützliche Eigenschaften mit. Sie helfen dir, Abkürzungen zu erkennen und Ergebnisse sicher einzuordnen.
Merke dir insbesondere diese vier Punkte:
k, skaliert die Determinante ebenfalls mit k. Das folgt direkt daraus, wie Kofaktoren in die Elemente eingehenMit diesen Eigenschaften kannst du Matrizen vor der Entwicklung vereinfachen – Zeilen reduzieren, Abhängigkeiten erkennen und unnötige Rechnungen vermeiden.
Bei der Kofaktorexpansion tauchen immer wieder typische Fehler auf. Darauf solltest du achten.
(-1)^(i+j) vergessen. Das ist der häufigste Fehler. Du berechnest den Minor korrekt, multiplizierst mit dem Element und liegst falsch, weil du das Vorzeichen weggelassen hast. Prüfe immer das Schachbrettmuster, bevor du einen Kofaktor notierstM_ij streichst du Zeile i und Spalte j – also genau die des betrachteten Elements. Ein verbreiteter Ausrutscher ist das Streichen der falschen, besonders bei 3×3, wo die verbleibenden Matrizen sich ähnlich sehen könnenad - bc anWenn dein Endergebnis merkwürdig aussieht, prüfe zuerst das Vorzeichenmuster und die korrekt gestrichenen Zeilen/Spalten.
Die Kofaktorexpansion ist in ein paar spezifischen Situationen das passende Werkzeug.
Für kleine Matrizen ist sie der direkteste Ansatz. 2×2 ist trivial, 3×3 ist per Hand in wenigen Minuten machbar. Ab 4×4 wächst die Zahl der rekursiven Schritte so schnell, dass andere Methoden schneller und weniger fehleranfällig sind.
In Theorie und Symbolik ist sie ebenfalls erste Wahl. Wenn du einen Beweis führst, eine Formel herleitest oder eine Determinante mit Variablen statt Zahlen berechnest, liefert die Kofaktorexpansion einen exakten symbolischen Ausdruck. Zeilenreduktion ist für Zahlen großartig, mit Symbolen wird sie schnell unübersichtlich.
Kurz zusammengefasst, wann du sie nutzen solltest:
Für große numerische Matrizen lass es bleiben. Zeilenreduktion und LU-Zerlegung sind hier viel schneller und weniger fehleranfällig. Die meisten numerischen Bibliotheken setzen genau deshalb auf diese Verfahren.
Die Kofaktorexpansion ist am besten als Werkzeug für Handrechnung und Theorie zu verstehen – nicht als universeller Algorithmus.
Die Kofaktorexpansion bietet dir eine systematische, rekursive Methode, um die Determinante beliebiger quadratischer Matrizen zu berechnen.
Die beiden Bausteine – Minoren und das Vorzeichenmuster (-1)^(i+j) – treiben den gesamten Prozess. Wenn die sitzen, ist der Rest leicht: Wähle eine Zeile oder Spalte mit Nullen, reduziere auf 2×2-Determinanten und summiere die Ergebnisse.
Darüber hinaus verbindet die Methode die Adjunktenmatrix mit der Formel für die Matrixinversion. Die Kofaktoren aus der Entwicklung sind dieselben, die adj(A) aufbauen – und bilden so die Grundlage, um die Inversion algebraisch zu verstehen.
Für kleine Matrizen und theoretische Arbeit ist das der transparenteste Ansatz. Für große numerische Matrizen solltest du zur Zeilenreduktion oder zu einer numerischen Bibliothek greifen.
Wenn du die Kofaktorexpansion in Aktion sehen willst, melde dich für unseren Linear Algebra for Data Science in R Kurs an.
Lerne mit DataCamp
Kurs
Kurs
Kurs
Blog
Tutorial
Mark Pedigo
Tutorial
Laiba Siddiqui
Tutorial
Allan Ouko