Lernpfad
KI-Grundlagen für Unternehmen
12 Std.
Letztes Jahr wurde Genesis als aufregendes neues Werkzeug zur Erstellung realistischer Physiksimulationen, interaktiver 4D-Welten und mehr veröffentlicht. Ich wollte es unbedingt ausprobieren, aber es war nicht einfach, es zum Laufen zu bringen. Ich muss zugeben, dass ich bei der Einrichtung vor vielen Herausforderungen stand.
In diesem Tutorial erzähle ich kurz von den Problemen, auf die ich gestoßen bin, und zeige, wie ich es schließlich mit Google Colab und ein paar Tricks zum Laufen gebracht habe.
Wenn du dir nur einen Überblick über Genesis verschaffen willst, schau dir meinen vorherigen Artikel an: Genesis Physics Engine: Ein Leitfaden mit Beispielen.
Als ich anfing, mit Genesis zu arbeiten, habe ich die Installationsschritte in der Dokumentation. Gleich zu Beginn stieß ich auf Probleme mit Abhängigkeiten. Genesis benötigt eine bestimmte Version eines Moduls namens Taichi (1.7.x), aber mein macOS unterstützt es nicht. Zum Vergleich: Mein Mac ist 8 Jahre alt....
Nach einigen Recherchen stellte ich fest, dass andere Nutzer dieselben Probleme hatten, sogar mit besseren Computern. Nach stundenlangem Bemühen und der Entdeckung, dass Genesis nur mit bestimmten Python-Versionen funktioniert, habe ich es schließlich installiert.
Aber es tauchten neue Probleme auf. Es ließ sich nichts rendern und ich hatte mehrere Probleme mit OpenGL. Selbst als ich versuchte, die Beispieldateien von GitHub auszuführen, stieß ich auf mehr Fehler und Konflikte.
Dann, als ich dachte, ich hätte das Problem gelöst, bekam ich Fehlermeldungen wie "Uniform nicht gefunden", was bedeutete, dass einige der Rendering-Einstellungen fehlten.
Während dieses Prozesses habe ich im Internet recherchiert, um herauszufinden, ob noch jemand auf die gleichen Probleme gestoßen ist. Es stellte sich heraus, dass ich nicht der Einzige war - viele Leute hatten die gleichen Schwierigkeiten und viele schienen keine Lösung zu finden, um ihre Skripte zum Laufen zu bringen.
Nach der anfänglichen Frustration entschied ich mich, Google Colab mit einem Pro-Konto auszuprobieren, und es stellte sich heraus, dass es genau das war, was ich brauchte. Mit den GPU-Ressourcen von Colab konnte ich das:
Ich entschied mich für den NVIDIA A100-SXM4-40GB, der sich als leistungsstark genug erwies, um Genesis-Simulationen effizient zu bewältigen.
Nachdem ich meine Google Colab-Umgebung eingerichtet und Genesis installiert hatte, habe ich versucht, das einfachste Beispiel aus der Dokumentation auszuführen:
import genesis as gs
gs.init(backend=gs.cpu)
scene = gs.Scene(show_viewer=True)Dieses Beispiel sollte Genesis mit dem CPU-Backend initialisieren und eine einfache Szene anzeigen. Allerdings stieß ich sofort auf den folgenden Fehler:
GenesisException: No display detected. Use show_viewer=False for headless mode.Die Fehlermeldung zeigt an, dass Genesis versucht, ein grafisches Fenster zu erstellen, um die Szene zu rendern, aber Google Colab unterstützt keine Echtzeit-Visualisierung. Colab läuft in einer entfernten Umgebung ohne Zugriff auf einen lokalen Bildschirm, daher funktioniert der Parameter show_viewer=True in der Initialisierung von gs.Scene() nicht.
Wie in der Fehlermeldung vorgeschlagen, habe ich den Code geändert, um den Viewer zu deaktivieren:
scene = gs.Scene(show_viewer=False)Dadurch konnte das Skript ohne Absturz ausgeführt werden. Dieser Ansatz bedeutete jedoch, dass es keine Möglichkeit gab, die Ergebnisse direkt zu visualisieren.
Nachdem ich im Internet nachgeschaut hatte, entdeckte ich, dass andere das gleiche Problem hatten. Viele Lösungsvorschläge beinhalteten die Konfiguration von entfernten OpenGL-Umgebungen oder die Verwendung von Xvfb zur Erstellung einer virtuellen Anzeige. Leider konnte ich nicht erreichen, dass diese Methoden in Colab zuverlässig funktionieren, wahrscheinlich aufgrund von Abhängigkeitskonflikten und Einschränkungen in der Umgebung.
An diesem Punkt brauchte ich eine praktischere Lösung!
Da Echtzeit-Rendering in Colab keine Option war, habe ich mich entschieden, die gerenderte Ausgabe Frame für Frame als Bilder zu speichern. Mit diesen Ideen konnte ich eine Reihe von Bildern erstellen, die später zu einer Animation kombiniert werden konnten.
In diesem Abschnitt gehe ich mit dir durch die Implementierung des Codes und die Ergebnisse, die ich erhalten habe.
Als Erstes habe ich Genesis installiert:
pip install genesis-worldDann habe ich Genesis mit dem CUDA-Backend für die GPU-Beschleunigung initialisiert.
import genesis as gs
gs.init(backend=gs.cuda)Das ist die Ausgabe, die ich erhalten habe:
[Genesis] [INFO] Running on [NVIDIA A100-SXM4-40GB] with backend gs.cuda. Device memory: 39.56 GB.
[Genesis] [INFO] 🚀 Genesis initialized. Version: 0.2.1, Seed: None, Precision: 32.Das erste, was ich brauchte, war ein Ordner, in dem Genesis die gerenderten Bilder speichern konnte.
import os
save_dir = "/content/simulation_frames"
os.makedirs(save_dir, exist_ok=True)Die Funktion os.makedirs() erstellt einen Ordner namens simulation_frames im angegebenen Pfad, und das Argument exist_ok=True sorgt dafür, dass kein Fehler ausgelöst wird, wenn der Ordner bereits existiert.
Auf diese Weise hatte ich einen speziellen Ort, um alle Bilder und Ausgaben meiner Simulation zu speichern.
Als nächstes musste ich eine Szene erstellen, in der ich Objekte hinzufügen und mit ihnen interagieren konnte.
scene = gs.Scene(show_viewer=False)gs.Scene() initialisiert einen neuen Simulationsraum und show_viewer=False deaktiviert die Echtzeit-Visualisierung. Zu diesem Zeitpunkt hatte ich eine leere Szene, auf der ich aufbauen konnte.
Als die Szene fertig war, habe ich angefangen, Objekte hinzuzufügen. Zuerst habe ich eine Ebene hinzugefügt, die als Boden dient.
plane = scene.add_entity(gs.morphs.Plane())Die Ebene dient als flache Basis für die Simulation. Standardmäßig ist sie unendlich und liegt flach entlang der x-y-Achse.
Als Nächstes habe ich der Szene einen Kasten hinzugefügt:
box = scene.add_entity(
gs.morphs.Box(
pos=(0, 0, 0), # Position of the box
size=(0.5, 0.5, 0.5) # Size of the box
)
)Ich habe die Box auf (0, 0, 0) gesetzt, genau in der Mitte der Szene, und ich habe die Größe auf 0.5 Einheiten in Breite, Höhe und Tiefe geändert, so dass sie kleiner ist als die Standardgröße.
Ich hatte einen einfachen Aufbau: ein Flugzeug als Boden und eine Kiste, die auf dem Boden lag.
Um das Geschehen in der Szene festzuhalten, habe ich eine Kamera hinzugefügt.
cam = scene.add_camera(
res=(320, 240), # Resolution: 320x240 pixels
pos=(3.5, 2.0, 2.5), # Camera position
lookat=(0, 0, 0.5), # Point the camera is focused on
fov=30 # Field of view (in degrees)
)Ich stellte die Bildauflösung auf 320x240 Pixel ein, eine praktische Wahl für den Test, und positionierte die Kamera auf (3.5, 2.0, 2.5), so dass sie einen klaren Blick auf die Szene von leicht oben und zur Seite hatte. Um sicherzustellen, dass der Kasten im Fokus bleibt, habe ich die Kamera auf (0, 0, 0,5) gerichtet, also genau über der Mitte des Kastens. Mit einem 30-Grad-Sichtfeld (FOV) hat die Kamera einen engen und fokussierten Blickwinkel auf die Szene eingefangen.
Der nächste Schritt bestand darin, die Szene zu erstellen, um sie für die Simulation und das Rendering vorzubereiten.
scene.build()Dieser Schritt ist wichtig, da Genesis die Simulation durch Just-in-Time-Kompilierung (JIT) optimiert. Als ich die Szene gebaut habe, hat Genesis:
Jetzt war alles bereit - mein Flugzeug, die Box und die Kamera waren aufgebaut, und die Szene war fertig.
Um die Simulation zu visualisieren, habe ich die Ergebnisse Frame für Frame gerendert und gespeichert. Jedes Bild wurde als Bild im Verzeichnis simulation_frames gespeichert.
from PIL import Image
import numpy as np
# Render and save images
for i in range(30):
scene.step() # Advance simulation
if i % 5 == 0: # Save every 5th frame
print(f"Step {i}/30")
rgb_data = cam.render(rgb=True)
# Extract image data and save it
img_array = rgb_data[0]
img = Image.fromarray((img_array * 255).astype(np.uint8))
img.save(f"{save_dir}/frame_{i:03d}.png")
print(f"Frame {i} saved to {save_dir}")Während des Rendering-Prozesses konnte ich beobachten, dass die ersten Bilder schnell gerendert wurden (bis zu 2.297 FPS), aber die Leistung sank, je weiter die Simulation fortschritt. Die FPS fielen schließlich auf etwa 0,33 FPS bei Frame 25. Das könnte an der zunehmenden Rechenkomplexität der Simulation liegen oder an den begrenzten GPU-Ressourcen für größere Szenen.
Das ist die Ausgabe, die ich erhalten habe:
[Genesis] [22:16:38] [INFO] Running at 2297.81 FPS.
INFO:genesis:Running at ~<2297.81>~ FPS.
Step 0/30
[Genesis] [22:16:56] [INFO] Running at 1.11 FPS.
INFO:genesis:Running at ~<1.11>~ FPS.
[Genesis] [22:16:56] [INFO] Running at 1.17 FPS.
INFO:genesis:Running at ~<1.17>~ FPS.
[Genesis] [22:16:56] [INFO] Running at 1.23 FPS.
INFO:genesis:Running at ~<1.23>~ FPS.
[Genesis] [22:16:56] [INFO] Running at 1.29 FPS.
INFO:genesis:Running at ~<1.29>~ FPS.
[Genesis] [22:16:56] [INFO] Running at 1.36 FPS.
INFO:genesis:Running at ~<1.36>~ FPS.
Frame 0 saved to /content/simulation_frames
Step 5/30
[Genesis] [22:17:14] [INFO] Running at 0.63 FPS.
INFO:genesis:Running at ~<0.63>~ FPS.
[Genesis] [22:17:14] [INFO] Running at 0.67 FPS.
INFO:genesis:Running at ~<0.67>~ FPS.
[Genesis] [22:17:14] [INFO] Running at 0.70 FPS.
INFO:genesis:Running at ~<0.70>~ FPS.
[Genesis] [22:17:14] [INFO] Running at 0.74 FPS.
INFO:genesis:Running at ~<0.74>~ FPS.
[Genesis] [22:17:14] [INFO] Running at 0.78 FPS.
INFO:genesis:Running at ~<0.78>~ FPS.
Frame 5 saved to /content/simulation_frames
Step 10/30
[Genesis] [22:17:32] [INFO] Running at 0.47 FPS.
INFO:genesis:Running at ~<0.47>~ FPS.
[Genesis] [22:17:32] [INFO] Running at 0.50 FPS.
INFO:genesis:Running at ~<0.50>~ FPS.
[Genesis] [22:17:32] [INFO] Running at 0.53 FPS.
INFO:genesis:Running at ~<0.53>~ FPS.
[Genesis] [22:17:32] [INFO] Running at 0.55 FPS.
INFO:genesis:Running at ~<0.55>~ FPS.
[Genesis] [22:17:32] [INFO] Running at 0.58 FPS.
INFO:genesis:Running at ~<0.58>~ FPS.
Frame 10 saved to /content/simulation_frames
Step 15/30
[Genesis] [22:17:49] [INFO] Running at 0.40 FPS.
INFO:genesis:Running at ~<0.40>~ FPS.
[Genesis] [22:17:49] [INFO] Running at 0.42 FPS.
INFO:genesis:Running at ~<0.42>~ FPS.
[Genesis] [22:17:49] [INFO] Running at 0.44 FPS.
INFO:genesis:Running at ~<0.44>~ FPS.
[Genesis] [22:17:49] [INFO] Running at 0.46 FPS.
INFO:genesis:Running at ~<0.46>~ FPS.
[Genesis] [22:17:49] [INFO] Running at 0.49 FPS.
INFO:genesis:Running at ~<0.49>~ FPS.
Frame 15 saved to /content/simulation_frames
Step 20/30
[Genesis] [22:18:07] [INFO] Running at 0.35 FPS.
INFO:genesis:Running at ~<0.35>~ FPS.
[Genesis] [22:18:07] [INFO] Running at 0.37 FPS.
INFO:genesis:Running at ~<0.37>~ FPS.
[Genesis] [22:18:07] [INFO] Running at 0.39 FPS.
INFO:genesis:Running at ~<0.39>~ FPS.
[Genesis] [22:18:07] [INFO] Running at 0.41 FPS.
INFO:genesis:Running at ~<0.41>~ FPS.
[Genesis] [22:18:07] [INFO] Running at 0.43 FPS.
INFO:genesis:Running at ~<0.43>~ FPS.
Frame 20 saved to /content/simulation_frames
Step 25/30
[Genesis] [22:18:24] [INFO] Running at 0.33 FPS.
INFO:genesis:Running at ~<0.33>~ FPS.
[Genesis] [22:18:24] [INFO] Running at 0.35 FPS.
INFO:genesis:Running at ~<0.35>~ FPS.
[Genesis] [22:18:24] [INFO] Running at 0.36 FPS.
INFO:genesis:Running at ~<0.36>~ FPS.
[Genesis] [22:18:24] [INFO] Running at 0.38 FPS.
INFO:genesis:Running at ~<0.38>~ FPS.
Frame 25 saved to /content/simulation_framesDassind die Bilder, die ich bekommen habe:
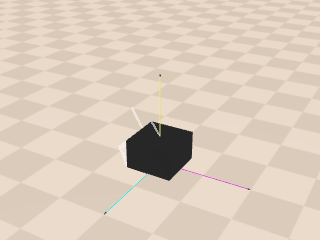
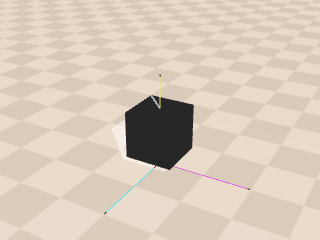
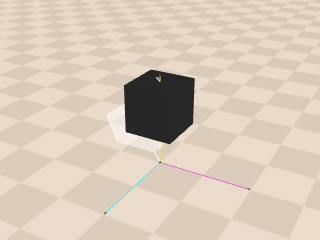
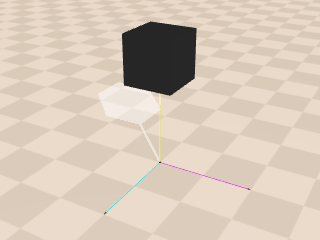
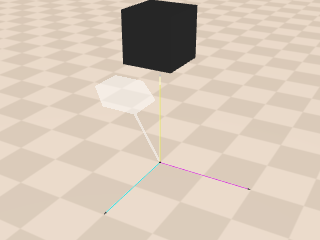
Jedes Bild zeigt, wie sich die Kiste im Laufe der Zeit im Verhältnis zur Ebene bewegt, wie sie von der Kamera gesehen wird. Die Simulation läuft schrittweise ab und mit jedem Schritt ändert sich die Position der Box, so dass es so aussieht, als würde sich die Box bewegen.
Dieses Beispiel zeigt, wie Genesis einfache physikalische Interaktionen simulieren und darstellen kann. Dieses Setup ist zwar einfach, aber es vermittelt einen guten Eindruck davon, wie sich Objekte in der Szene verhalten. Aber du kannst mit Genesis durchaus komplexere und realistischere Szenarien erstellen! Wir werden einige dieser Möglichkeiten im nächsten Abschnitt untersuchen.
Mit Genesis kannst du komplexe Szenen erstellen, indem du verschiedene Objekte und Morphs hinzufügst. Objekte können von einfachen Primitiven wie Ebenen, Kästen und Kugeln bis hin zu komplexeren Objekten wie Robotern und Terrains reichen.
Shape Primitives:
Unterstützung für externe Dateien:
Genesis verwendet ein einheitliches Konzept, das "Morph" genannt wird und Geometrie- und Poseninformationen enthält. Dieses objektorientierte Design ermöglicht die direkte Interaktion mit Entitäten über deren Methoden.
Eine der Hauptstärken von Genesis ist die Fähigkeit, mit fortschrittlichen Kamerafunktionen detaillierte visuelle Ausgaben zu erstellen. Die Kameras arbeiten im "Headless-Modus", das heißt, sie können Bilder erzeugen, ohne einen Bildschirm zu benötigen. Sie können verschiedene Arten von Bildern erzeugen, z. B. normale Farbbilder (RGB), Tiefenkarten, die zeigen, wie weit Objekte entfernt sind, Segmentierungsmasken, die verschiedene Teile der Szene kennzeichnen, und Normalkarten, die Oberflächendetails darstellen.
Du kannst Videos erstellen, indem du die Kameras automatisch jedes Bild der Simulation aufzeichnen lässt. Du kannst die Kamera sogar während der Aufnahme bewegen, um das Video dynamischer und immersiver zu machen.
Du kannst zum Beispiel eine Kamera so konfigurieren, dass sie sich auf einem kreisförmigen Pfad um die Szene bewegt, während sie Bilder aufnimmt. Mit der Funktion cam.start_recording() wird die Aufzeichnung gestartet und bei jedem Schritt der Simulation wird die Position der Kamera aktualisiert. Sobald alle Bilder erfasst sind, speichert cam.stop_recording() das Video als "video.mp4".
Das abschließende Video zeigt eine flüssige Darstellung der Simulation, die zeigt, wie die Objekte interagieren und sich mit der Zeit bewegen.
Du kannst auch verschiedene Geländetypen für Robotik und KI-Training erstellen. Du kannst die eingebauten Geländeoptionen nutzen oder deine eigenen entwerfen, indem du eigene Höhenkarten mit gs.morphs.Terrain bereitstellst. Diese Terrains eignen sich perfekt zum Testen und Trainieren der Bewegungsabläufe von Robotern und machen Genesis zu einem großartigen Werkzeug für die Robotikforschung.
Du kannst deine Simulationen auch auf verschiedene Arten anpassen. Du kannst realistische Texturen zu Objekten hinzufügen, damit sie lebensechter aussehen. Außerdem werden viele Dateiformate für den Import von Modellen unterstützt. Wenn ein Format nicht unterstützt wird, kannst du beantragen, dass es hinzugefügt wird. Außerdem kannst du deine eigenen benutzerdefinierten Objektformen (Morphs genannt) mit personalisierten Dateien und Einstellungen erstellen.
Dieses Tutorial bietet ein einfaches Beispiel, um dir den Einstieg in Genesis zu erleichtern. Wir haben die Grundlagen behandelt, wie das Erstellen von Szenen, das Hinzufügen von Objekten und das Rendern von Ausgaben, um zu zeigen, wie diese leistungsstarke Physik-Engine funktioniert.
Das ist aber nur der Anfang dessen, was Genesis tun kann. Mit der richtigen Hardware, wie einer starken GPU und genügend Speicher, gibt es so viele Möglichkeiten. Du kannst es für komplexe Robotersimulationen oder zur Erstellung hochwertiger Datensätze für das KI-Training verwenden. Auch wenn die Einrichtung schwierig sein kann, ist es definitiv ein Werkzeug mit großem Potenzial!
Lerne KI mit diesen Kursen!
Lernpfad
Lernpfad
Lernpfad
Blog
Nathaniel Taylor-Leach
4 Min.
Blog
Nisha Arya Ahmed
15 Min.
Blog
Nathaniel Taylor-Leach
8 Min.
Blog
Nathaniel Taylor-Leach