Program
Dasar-Dasar Kecerdasan Buatan
10 Hr
Algoritma penelusuran graf merupakan dasar bagi banyak aplikasi ilmu komputer, dari pengembangan game hingga robotika. Algoritma ini dirancang untuk menjelajah dan menavigasi graf, yaitu struktur data yang terdiri dari simpul (vertex) dan sisi (edge). Di antara algoritma tersebut, algoritma A* menonjol sebagai pendekatan yang efisien dan serbaguna untuk menemukan jalur optimal.
Algoritma A* adalah algoritma pencarian terinformasi, artinya algoritma ini memanfaatkan fungsi heuristik untuk mengarahkan pencariannya menuju tujuan. Fungsi heuristik ini memperkirakan biaya untuk mencapai tujuan dari simpul tertentu, sehingga memungkinkan algoritma memprioritaskan jalur yang menjanjikan dan menghindari eksplorasi yang tidak perlu.
Dalam artikel ini, kita akan melihat konsep kunci algoritma A*, implementasinya di Python, penerapannya, serta kelebihan dan keterbatasannya.
Untuk mempelajari lebih lanjut tentang pemrograman Python, lihat Kursus Introduction to Python for Developers kami.
Algoritma A* adalah algoritma penelusuran graf dan pencarian jalur yang kuat dan banyak digunakan. Algoritma ini menemukan jalur terpendek antara simpul awal dan simpul tujuan dalam graf berbobot.

Algoritma A*
Algoritma A* menggabungkan keunggulan dari dua algoritma lain:
Bayangkan Anda ingin mencari rute terpendek antara dua kota pada peta. Sementara algoritma Dijkstra akan mengeksplorasi ke segala arah dan Best-First Search mungkin langsung menuju tujuan (berpotensi melewatkan jalan pintas), A* melakukan sesuatu yang lebih cerdas. Algoritma ini mempertimbangkan keduanya:
Kombinasi ini membantu A* membuat keputusan yang terinformasi tentang jalur mana yang akan dijelajahi berikutnya, sehingga efisien sekaligus akurat.
Untuk memahami algoritma A*, Anda perlu mengenal konsep dasar berikut:
Pada bagian berikutnya, kita akan melihat lebih dalam konsep-konsep ini dan bagaimana A* menggunakannya untuk menemukan jalur optimal.
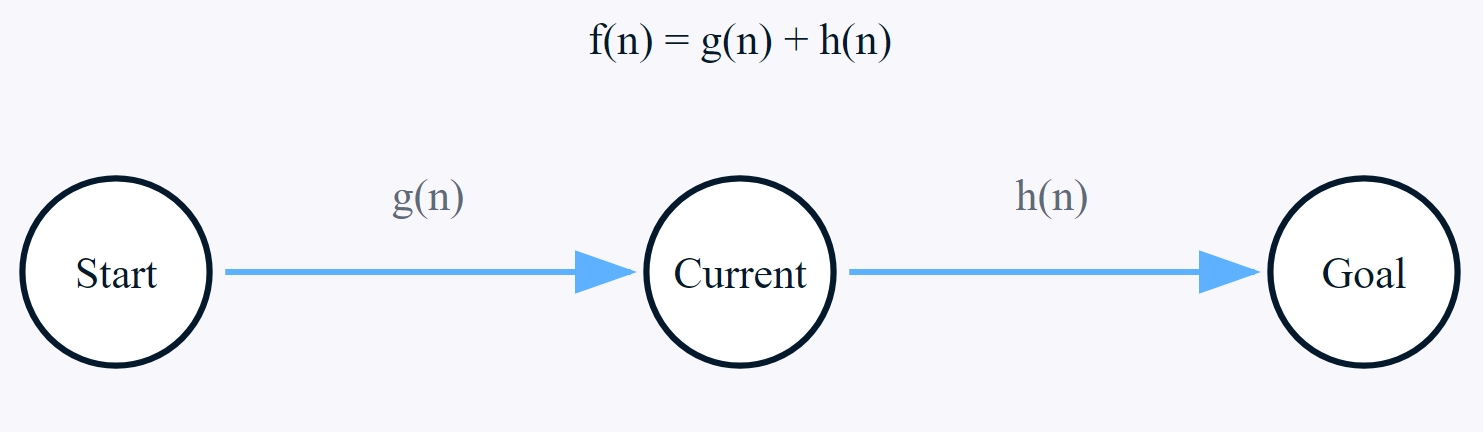
Efisiensi algoritma A* berasal dari evaluasi jalur yang cerdas menggunakan tiga komponen utama: g(n), h(n), dan f(n). Komponen-komponen ini bekerja bersama untuk mengarahkan proses pencarian ke jalur yang paling menjanjikan.
Fungsi Biaya Algoritma A*
Fungsi biaya jalur g(n) merepresentasikan jarak pasti dan diketahui dari simpul awal ke posisi saat ini dalam pencarian kita. Berbeda dengan nilai perkiraan, biaya ini bersifat presisi dan dihitung dengan menjumlahkan semua bobot sisi yang telah dilalui sepanjang jalur yang kita pilih.
Secara matematis, untuk jalur melalui simpul n0 (simpul awal) hingga nk (simpul saat ini), kita dapat mengekspresikan g(n) sebagai:
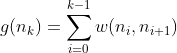
Di mana:
Saat kita bergerak melalui graf, nilai ini terakumulasi, memberi kita ukuran yang jelas atas sumber daya aktual (apakah itu jarak, waktu, atau metrik lain) yang telah kita keluarkan untuk mencapai posisi saat ini.
Fungsi heuristik h(n) memberikan perkiraan biaya dari simpul saat ini ke simpul tujuan, bertindak sebagai "tebakan terinformasi" algoritma tentang sisa jalur.
Secara matematis, untuk simpul n apa pun, estimasi heuristik harus memenuhi kondisi h(n)≤h*(n) , di mana h*(n) adalah biaya aktual ke tujuan, menjadikannya admissible karena tidak pernah melebih-lebihkan biaya sebenarnya.
Dalam masalah berbasis grid atau mirip peta, fungsi heuristik yang umum termasuk jarak Manhattan dan jarak Euclidean. Untuk koordinat (x1,y1) dari simpul saat ini dan (x2,y2) dari simpul tujuan, jarak-jarak ini dihitung sebagai berikut:
![]()
![]()
Perkiraan biaya total f(n) adalah landasan proses pengambilan keputusan algoritma A*, yang menggabungkan biaya jalur aktual dan estimasi heuristik untuk mengevaluasi potensi setiap simpul. Untuk simpul n mana pun, biaya ini dihitung sebagai:
![]()
Di mana:
Algoritma ini menggunakan nilai gabungan ini untuk memilih simpul mana yang akan dijelajahi berikutnya secara strategis, selalu memilih simpul dengan nilai f(n) terendah dari daftar terbuka, sehingga memastikan keseimbangan optimal antara biaya yang diketahui dan perkiraan jarak yang tersisa.
Algoritma A* mempertahankan dua daftar penting
Open list (daftar terbuka):
Closed list (daftar tertutup):
Algoritma terus-menerus memilih simpul dengan nilai f(n) terendah dari daftar terbuka, mengevaluasinya, dan memindahkannya ke daftar tertutup hingga mencapai simpul tujuan atau menentukan bahwa tidak ada jalur yang ada.
Kini setelah kita memahami komponen fundamental A*, mari kita lihat bagaimana semuanya berpadu dalam praktik. Implementasi algoritma dapat diuraikan menjadi langkah-langkah yang jelas dan logis untuk mengubah konsep-konsep ini menjadi solusi pencarian jalur yang berfungsi.
Berikut cara kerja algoritma, langkah demi langkah:
function A_Star(start, goal):
// Initialize open and closed lists
openList = [start] // Nodes to be evaluated
closedList = [] // Nodes already evaluated
// Initialize node properties
start.g = 0 // Cost from start to start is 0
start.h = heuristic(start, goal) // Estimate to goal
start.f = start.g + start.h // Total estimated cost
start.parent = null // For path reconstruction
while openList is not empty:
// Get node with lowest f value - implement using a priority queue
// for faster retrieval of the best node
current = node in openList with lowest f value
// Check if we've reached the goal
if current = goal:
return reconstruct_path(current)
// Move current node from open to closed list
remove current from openList
add current to closedList
// Check all neighboring nodes
for each neighbor of current:
if neighbor in closedList:
continue // Skip already evaluated nodes
// Calculate tentative g score
tentative_g = current.g + distance(current, neighbor)
if neighbor not in openList:
add neighbor to openList
else if tentative_g >= neighbor.g:
continue // This path is not better
// This path is the best so far
neighbor.parent = current
neighbor.g = tentative_g
neighbor.h = heuristic(neighbor, goal)
neighbor.f = neighbor.g + neighbor.h
return failure // No path exists
function reconstruct_path(current):
path = []
while current is not null:
add current to beginning of path
current = current.parent
return pathMari kita uraikan setiap komponen dari implementasi ini:
Algoritma dimulai dengan menyiapkan dua daftar penting:
Setiap simpul menyimpan empat informasi penting:
Inti A* adalah loop utamanya, yang berlanjut hingga:
Pada setiap iterasi, algoritma:
Untuk setiap tetangga, algoritma:
Setelah tujuan tercapai, algoritma menelusuri kembali melalui referensi parent untuk menyusun jalur optimal dari awal ke tujuan.
Pendekatan sistematis ini memastikan bahwa A* akan selalu menemukan jalur optimal jika:
Pada bagian berikutnya, kita akan menerjemahkan pseudocode ini menjadi implementasi Python yang praktis, lengkap dengan visualisasi untuk membantu Anda memahami bagaimana algoritma menjelajah ruang pencarian.
Sekarang setelah kita memahami teori dan pseudocode, mari implementasikan A* di Python. Kita akan membuat implementasi praktis yang dapat Anda gunakan sebagai dasar untuk proyek Anda sendiri. Untuk membuatnya konkret, kita akan mengimplementasikan algoritma pada grid 2D—skenario umum dalam aplikasi game dan robotika.
Pertama, kita mengimpor pustaka yang diperlukan dan membuat struktur simpul yang akan menyimpan posisi dan informasi pencarian jalur untuk setiap titik dalam ruang pencarian kita.
from typing import List, Tuple, Dict, Set
import numpy as np
import heapq
from math import sqrt
def create_node(position: Tuple[int, int], g: float = float('inf'),
h: float = 0.0, parent: Dict = None) -> Dict:
"""
Create a node for the A* algorithm.
Args:
position: (x, y) coordinates of the node
g: Cost from start to this node (default: infinity)
h: Estimated cost from this node to goal (default: 0)
parent: Parent node (default: None)
Returns:
Dictionary containing node information
"""
return {
'position': position,
'g': g,
'h': h,
'f': g + h,
'parent': parent
}Untuk mendukung algoritma pencarian jalur kita, kita akan membuat beberapa fungsi bantu. Pertama, kita akan menerapkan fungsi untuk menghitung jarak antar titik menggunakan jarak Euclidean.
Lalu, kita tambahkan fungsi untuk menemukan posisi tetangga yang valid di grid, dengan cermat memeriksa batas dan rintangan. Terakhir, kita buat fungsi yang membantu kita merekonstruksi jalur setelah tujuan ditemukan.
def calculate_heuristic(pos1: Tuple[int, int], pos2: Tuple[int, int]) -> float:
"""
Calculate the estimated distance between two points using Euclidean distance.
"""
x1, y1 = pos1
x2, y2 = pos2
return sqrt((x2 - x1)**2 + (y2 - y1)**2)
def get_valid_neighbors(grid: np.ndarray, position: Tuple[int, int]) -> List[Tuple[int, int]]:
"""
Get all valid neighboring positions in the grid.
Args:
grid: 2D numpy array where 0 represents walkable cells and 1 represents obstacles
position: Current position (x, y)
Returns:
List of valid neighboring positions
"""
x, y = position
rows, cols = grid.shape
# All possible moves (including diagonals)
possible_moves = [
(x+1, y), (x-1, y), # Right, Left
(x, y+1), (x, y-1), # Up, Down
(x+1, y+1), (x-1, y-1), # Diagonal moves
(x+1, y-1), (x-1, y+1)
]
return [
(nx, ny) for nx, ny in possible_moves
if 0 <= nx < rows and 0 <= ny < cols # Within grid bounds
and grid[nx, ny] == 0 # Not an obstacle
]
def reconstruct_path(goal_node: Dict) -> List[Tuple[int, int]]:
"""
Reconstruct the path from goal to start by following parent pointers.
"""
path = []
current = goal_node
while current is not None:
path.append(current['position'])
current = current['parent']
return path[::-1] # Reverse to get path from start to goalSekarang mari kita implementasikan algoritma kita. Kita akan menggunakan priority queue agar selalu menjelajah jalur yang paling menjanjikan terlebih dahulu.
Algoritma kita akan mempertahankan dua himpunan: open set untuk simpul yang masih perlu dijelajahi dan closed set untuk simpul yang sudah diperiksa.
Saat menjelajah grid, kita akan terus memperbarui biaya jalur ketika menemukan rute yang lebih baik hingga kita mencapai tujuan.
def find_path(grid: np.ndarray, start: Tuple[int, int],
goal: Tuple[int, int]) -> List[Tuple[int, int]]:
"""
Find the optimal path using A* algorithm.
Args:
grid: 2D numpy array (0 = free space, 1 = obstacle)
start: Starting position (x, y)
goal: Goal position (x, y)
Returns:
List of positions representing the optimal path
"""
# Initialize start node
start_node = create_node(
position=start,
g=0,
h=calculate_heuristic(start, goal)
)
# Initialize open and closed sets
open_list = [(start_node['f'], start)] # Priority queue
open_dict = {start: start_node} # For quick node lookup
closed_set = set() # Explored nodes
while open_list:
# Get node with lowest f value
_, current_pos = heapq.heappop(open_list)
current_node = open_dict[current_pos]
# Check if we've reached the goal
if current_pos == goal:
return reconstruct_path(current_node)
closed_set.add(current_pos)
# Explore neighbors
for neighbor_pos in get_valid_neighbors(grid, current_pos):
# Skip if already explored
if neighbor_pos in closed_set:
continue
# Calculate new path cost
tentative_g = current_node['g'] + calculate_heuristic(current_pos, neighbor_pos)
# Create or update neighbor
if neighbor_pos not in open_dict:
neighbor = create_node(
position=neighbor_pos,
g=tentative_g,
h=calculate_heuristic(neighbor_pos, goal),
parent=current_node
)
heapq.heappush(open_list, (neighbor['f'], neighbor_pos))
open_dict[neighbor_pos] = neighbor
elif tentative_g < open_dict[neighbor_pos]['g']:
# Found a better path to the neighbor
neighbor = open_dict[neighbor_pos]
neighbor['g'] = tentative_g
neighbor['f'] = tentative_g + neighbor['h']
neighbor['parent'] = current_node
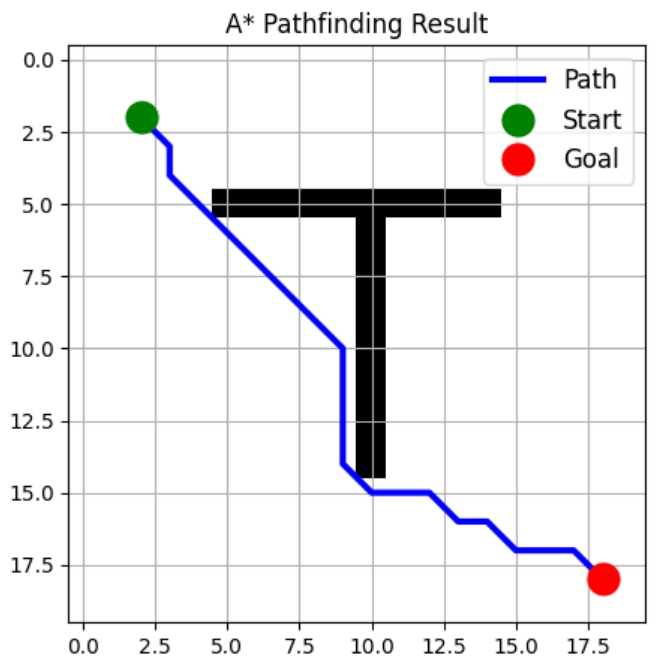
return [] # No path foundSekarang, mari kita buat fungsi visualisasi. Ini akan menampilkan tata letak grid dengan rintangan, menggambar jalur optimal yang kita hitung, dan menandai posisi awal serta tujuan dengan jelas.
import matplotlib.pyplot as plt
def visualize_path(grid: np.ndarray, path: List[Tuple[int, int]]):
"""
Visualize the grid and found path.
"""
plt.figure(figsize=(10, 10))
plt.imshow(grid, cmap='binary')
if path:
path = np.array(path)
plt.plot(path[:, 1], path[:, 0], 'b-', linewidth=3, label='Path')
plt.plot(path[0, 1], path[0, 0], 'go', markersize=15, label='Start')
plt.plot(path[-1, 1], path[-1, 0], 'ro', markersize=15, label='Goal')
plt.grid(True)
plt.legend(fontsize=12)
plt.title("A* Pathfinding Result")
plt.show()Berikut cara menggunakan implementasi ini:
# Create a sample grid
grid = np.zeros((20, 20)) # 20x20 grid, all free space initially
# Add some obstacles
grid[5:15, 10] = 1 # Vertical wall
grid[5, 5:15] = 1 # Horizontal wall
# Define start and goal positions
start_pos = (2, 2)
goal_pos = (18, 18)
# Find the path
path = find_path(grid, start_pos, goal_pos)
if path:
print(f"Path found with {len(path)} steps!")
visualize_path(grid, path)
else:
print("No path found!")Keluaran
Path found with 22 steps!
Implementasi ini efisien dan mudah dikembangkan. Anda dapat dengan mudah memodifikasinya untuk:
Pada bagian berikutnya, kita akan melihat beberapa penerapan praktis dari algoritma ini dan bagaimana algoritma ini digunakan dalam skenario dunia nyata.
Efisiensi dan fleksibilitas algoritma A* membuatnya berharga di berbagai domain. Berikut area utama tempat algoritma ini unggul:
Algoritma pencarian A* banyak digunakan dalam pengembangan gim video karena kemampuannya menemukan jalur optimal. Algoritma ini meningkatkan pengalaman pemain dengan memungkinkan pergerakan karakter yang lebih realistis dan responsif.
A* banyak digunakan dalam sistem navigasi untuk mengoptimalkan rute, dengan mempertimbangkan berbagai faktor seperti jarak dan potensi rintangan.
Algoritma A* sangat penting untuk robotika, di mana pergerakan yang efisien sangat penting bagi produktivitas dan keselamatan.
A* juga diterapkan untuk mengoptimalkan operasi jaringan, di mana efisiensi dalam pemanfaatan sumber daya dan perutean sangat penting.
Yang membuat A* sangat berharga adalah kemampuannya beradaptasi melalui fungsi heuristik kustom, sehingga dapat dioptimalkan untuk metrik berbeda seperti jarak, waktu, atau penggunaan energi.
Pada bagian berikutnya, kita akan melihat beberapa tantangan umum dan teknik optimasi untuk mengimplementasikan A* secara efektif.
Walaupun A* kuat, mengimplementasikannya secara efektif memerlukan penanganan beberapa tantangan umum. Hambatan terbesar yang dihadapi pengembang adalah mengelola sumber daya secara efisien, khususnya saat menangani ruang pencarian yang besar.
Tantangan utamanya meliputi:
Untungnya, ada beberapa strategi optimasi efektif untuk mengatasi tantangan ini:
Saat kinerja sangat krusial, pertimbangkan peningkatan kecepatan berikut:
Satu pendekatan yang sangat efektif untuk ruang yang luas adalah pencarian bilateral—mencari dari awal dan tujuan secara bersamaan. Selain itu, saat bekerja dengan pencarian jalur berbasis grid, Anda dapat meningkatkan kinerja secara signifikan dengan pra-menghitung nilai heuristik atau menggunakan tabel pencarian.
Ingatlah untuk memilih teknik optimasi berdasarkan kebutuhan dan batasan spesifik Anda. Kuncinya adalah menemukan keseimbangan yang tepat antara penggunaan memori dan kecepatan komputasi untuk aplikasi Anda.
Algoritma A* merupakan alat fundamental dalam masalah pencarian jalur dan penelusuran graf. Melalui panduan ini, kita telah melihat konsep intinya, mengimplementasikan solusi praktis di Python, dan meninjau beragam penerapannya. Kekuatan algoritma ini terletak pada keseimbangan antara akurasi dan efisiensi, menjadikannya sangat bernilai di berbagai domain dari gim hingga robotika.
Walaupun implementasi A* memiliki tantangan, teknik optimasi yang telah kita bahas dapat membantu Anda menciptakan solusi yang efisien. Jika Anda mengembangkan gim, merencanakan jalur robot, atau menyelesaikan masalah perutean, maka memahami algoritma A* memberi Anda pendekatan yang kuat untuk menemukan jalur optimal dalam aplikasi Anda
Membangun algoritma canggih seperti ini memerlukan landasan yang kuat dalam konsep pemrograman Python dan praktik terbaik. Ingin memperkuat dasar Python Anda dan mengatasi algoritma yang lebih lanjut seperti A*?
Tingkatkan keterampilan pemrograman Anda ke level berikutnya dengan Kursus Intermediate Python for Developers kami, tempat Anda menguasai fungsi kustom, mengeksplorasi modul penting, dan membangun aplikasi yang canggih.
Kursus Teratas di DataCamp
Program
Kursus
Kursus
blogs
David Woods
13 mnt
blogs
Hugo Bowne-Anderson
13 mnt
blogs
Javier Canales Luna
14 mnt
blogs
Dario Radečić
15 mnt
