Track
AI Fundamentals
10 hr
Graph traversal algorithms are fundamental to many computer science applications, from game development to robotics. These algorithms are designed to explore and navigate through graphs, which are data structures composed of nodes (vertices) and edges. Among these algorithms, the A* algorithm stands out as a particularly efficient and versatile approach for finding optimal paths.
The A* algorithm is an informed search algorithm, meaning it leverages a heuristic function to guide its search towards the goal. This heuristic function estimates the cost of reaching the goal from a given node, allowing the algorithm to prioritize promising paths and avoid exploring unnecessary ones.
In this article, we'll look at the key concepts of the A* algorithm, its implementation in Python, its applications, and its advantages and limitations.
To learn more about Python programming, check out our Introduction to Python for Developers Course course.
The A* algorithm is a powerful and widely used graph traversal and path finding algorithm. It finds the shortest path between a starting node and a goal node in a weighted graph.

A* algorithm
The A* algorithm combines the best aspects of two other algorithms:
Imagine you're trying to find the shortest route between two cities on a map. While Dijkstra's algorithm would explore in all directions and Best-First Search might head straight toward the destination (potentially missing shortcuts), A* does something cleverer. It considers both:
This combination helps A* make informed decisions about which path to explore next, making it both efficient and accurate.
To understand A* algorithm, you need to be familiar with these fundamental concepts:
In the next section, we'll look deeper into these concepts and see how A* uses them to find optimal paths.
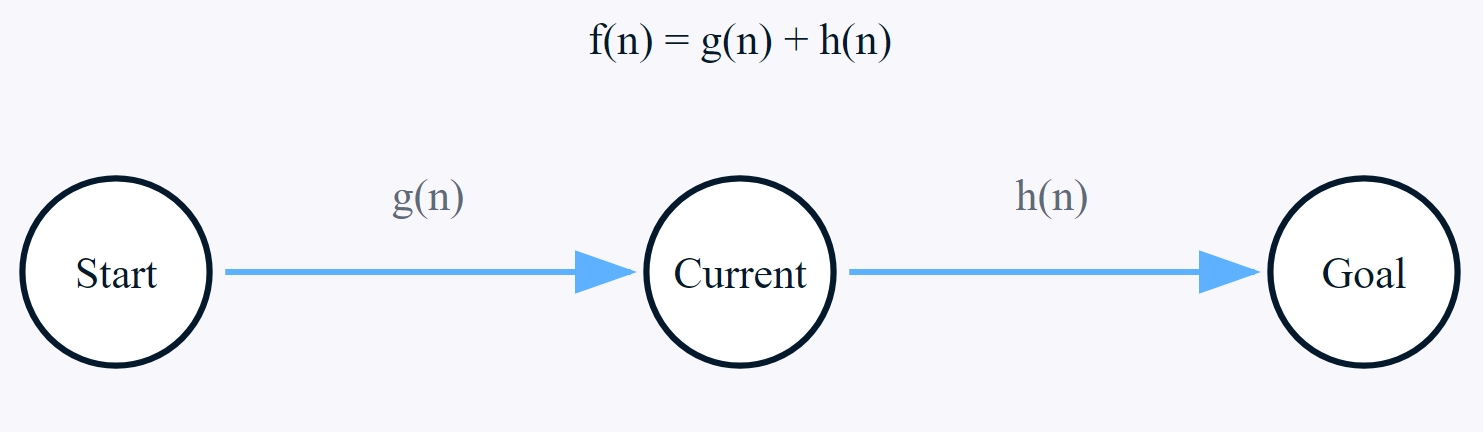
The A* algorithm's efficiency comes from its smart evaluation of paths using three key components: g(n), h(n), and f(n). These components work together to guide the search process toward the most promising paths.
A* algorithm Cost Function
The path cost function g(n) represents the exact, known distance from the initial starting node to the current position in our search. Unlike estimated values, this cost is precise and calculated by adding up all the individual edge weights that have been traversed along our chosen path.
Mathematically, for a path through nodes n0(start node) to nk (current node), we can express g(n) as:
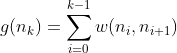
Where:
As we move through the graph, this value accumulates, giving us a clear measure of the actual resources (whether that's distance, time, or any other metric) we've expended to reach our current position.
The heuristic function h(n) provides an estimated cost from the current node to the goal node, acting as the algorithm's "informed guess" about the remaining path.
Mathematically, for any given node n, the heuristic estimate must satisfy the condition h(n)≤h*(n) , where h*(n) is the actual cost to the goal, making it admissible by never overestimating the true cost.
In grid-based or map-like problems, common heuristic functions include the Manhattan distance and Euclidean distance. For coordinates (x1,y1) of the current node and (x2,y2) of the goal node, these distances are calculated as:
![]()
![]()
The total estimated cost f(n) is the cornerstone of A* algorithm's decision-making process, combining both the actual path cost and the heuristic estimate to evaluate each node's potential. For any node n, this cost is calculated as:
![]()
Where:
The algorithm uses this combined value to strategically choose which node to explore next, always selecting the node with the lowest f(n) value from the open list, thus ensuring an optimal balance between known costs and estimated remaining distances.
The A* algorithm maintains two essential lists
Open list:
Closed list:
The algorithm continually selects the node with the lowest f(n) value from the open list, evaluates it, and moves it to the closed list until it reaches the goal node or determines no path exists.
Now that we understand the fundamental components of A*, let's see how they come together in practice. The algorithm's implementation can be broken down into clear, logical steps that transform these concepts into a working path finding solution.
Here's how the algorithm works, step by step:
function A_Star(start, goal):
// Initialize open and closed lists
openList = [start] // Nodes to be evaluated
closedList = [] // Nodes already evaluated
// Initialize node properties
start.g = 0 // Cost from start to start is 0
start.h = heuristic(start, goal) // Estimate to goal
start.f = start.g + start.h // Total estimated cost
start.parent = null // For path reconstruction
while openList is not empty:
// Get node with lowest f value - implement using a priority queue
// for faster retrieval of the best node
current = node in openList with lowest f value
// Check if we've reached the goal
if current = goal:
return reconstruct_path(current)
// Move current node from open to closed list
remove current from openList
add current to closedList
// Check all neighboring nodes
for each neighbor of current:
if neighbor in closedList:
continue // Skip already evaluated nodes
// Calculate tentative g score
tentative_g = current.g + distance(current, neighbor)
if neighbor not in openList:
add neighbor to openList
else if tentative_g >= neighbor.g:
continue // This path is not better
// This path is the best so far
neighbor.parent = current
neighbor.g = tentative_g
neighbor.h = heuristic(neighbor, goal)
neighbor.f = neighbor.g + neighbor.h
return failure // No path exists
function reconstruct_path(current):
path = []
while current is not null:
add current to beginning of path
current = current.parent
return pathLet's break down each component of this implementation:
The algorithm begins by setting up two essential lists:
Each node stores four critical pieces of information:
The core of A* is its main loop, which continues until either:
During each iteration, the algorithm:
For each neighbor, the algorithm:
Once the goal is reached, the algorithm works backward through the parent references to construct the optimal path from start to goal.
This systematic approach ensures that A* will always find the optimal path if:
In the next section, we'll translate this pseudocode into a practical Python implementation, complete with visualizations to help you understand how the algorithm explores the search space.
Now that we understand the theory and pseudocode, let's implement A* in Python. We'll create a practical implementation that you can use as a foundation for your own projects. To make this concrete, we'll implement the algorithm on a 2D grid—a common scenario in games and robotics applications.
We first import necessary libraries and create a node structure that will store position and pathfinding information for each point in our search space.
from typing import List, Tuple, Dict, Set
import numpy as np
import heapq
from math import sqrt
def create_node(position: Tuple[int, int], g: float = float('inf'),
h: float = 0.0, parent: Dict = None) -> Dict:
"""
Create a node for the A* algorithm.
Args:
position: (x, y) coordinates of the node
g: Cost from start to this node (default: infinity)
h: Estimated cost from this node to goal (default: 0)
parent: Parent node (default: None)
Returns:
Dictionary containing node information
"""
return {
'position': position,
'g': g,
'h': h,
'f': g + h,
'parent': parent
}To support our pathfinding algorithm, we'll create several helper functions. First, we'll implement a function to calculate distances between points using Euclidean distance.
Then, we'll add a function to find valid neighboring positions in our grid, carefully checking boundaries and obstacles. Finally, we'll create a function that helps us reconstruct the path once we've found our goal.
def calculate_heuristic(pos1: Tuple[int, int], pos2: Tuple[int, int]) -> float:
"""
Calculate the estimated distance between two points using Euclidean distance.
"""
x1, y1 = pos1
x2, y2 = pos2
return sqrt((x2 - x1)**2 + (y2 - y1)**2)
def get_valid_neighbors(grid: np.ndarray, position: Tuple[int, int]) -> List[Tuple[int, int]]:
"""
Get all valid neighboring positions in the grid.
Args:
grid: 2D numpy array where 0 represents walkable cells and 1 represents obstacles
position: Current position (x, y)
Returns:
List of valid neighboring positions
"""
x, y = position
rows, cols = grid.shape
# All possible moves (including diagonals)
possible_moves = [
(x+1, y), (x-1, y), # Right, Left
(x, y+1), (x, y-1), # Up, Down
(x+1, y+1), (x-1, y-1), # Diagonal moves
(x+1, y-1), (x-1, y+1)
]
return [
(nx, ny) for nx, ny in possible_moves
if 0 <= nx < rows and 0 <= ny < cols # Within grid bounds
and grid[nx, ny] == 0 # Not an obstacle
]
def reconstruct_path(goal_node: Dict) -> List[Tuple[int, int]]:
"""
Reconstruct the path from goal to start by following parent pointers.
"""
path = []
current = goal_node
while current is not None:
path.append(current['position'])
current = current['parent']
return path[::-1] # Reverse to get path from start to goalNow let’s implement our algorithm. We'll use a priority queue to make sure we always explore the most promising paths first.
Our algorithm will maintain two sets: an open set for nodes we still need to explore and a closed set for nodes we've already checked.
As we explore the grid, we'll continuously update path costs whenever we find better routes until we reach our goal.
def find_path(grid: np.ndarray, start: Tuple[int, int],
goal: Tuple[int, int]) -> List[Tuple[int, int]]:
"""
Find the optimal path using A* algorithm.
Args:
grid: 2D numpy array (0 = free space, 1 = obstacle)
start: Starting position (x, y)
goal: Goal position (x, y)
Returns:
List of positions representing the optimal path
"""
# Initialize start node
start_node = create_node(
position=start,
g=0,
h=calculate_heuristic(start, goal)
)
# Initialize open and closed sets
open_list = [(start_node['f'], start)] # Priority queue
open_dict = {start: start_node} # For quick node lookup
closed_set = set() # Explored nodes
while open_list:
# Get node with lowest f value
_, current_pos = heapq.heappop(open_list)
current_node = open_dict[current_pos]
# Check if we've reached the goal
if current_pos == goal:
return reconstruct_path(current_node)
closed_set.add(current_pos)
# Explore neighbors
for neighbor_pos in get_valid_neighbors(grid, current_pos):
# Skip if already explored
if neighbor_pos in closed_set:
continue
# Calculate new path cost
tentative_g = current_node['g'] + calculate_heuristic(current_pos, neighbor_pos)
# Create or update neighbor
if neighbor_pos not in open_dict:
neighbor = create_node(
position=neighbor_pos,
g=tentative_g,
h=calculate_heuristic(neighbor_pos, goal),
parent=current_node
)
heapq.heappush(open_list, (neighbor['f'], neighbor_pos))
open_dict[neighbor_pos] = neighbor
elif tentative_g < open_dict[neighbor_pos]['g']:
# Found a better path to the neighbor
neighbor = open_dict[neighbor_pos]
neighbor['g'] = tentative_g
neighbor['f'] = tentative_g + neighbor['h']
neighbor['parent'] = current_node
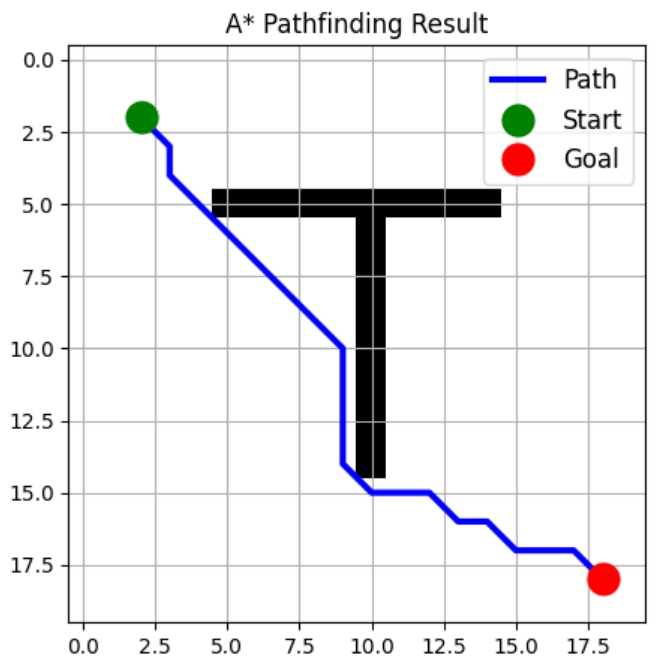
return [] # No path foundNow, let’s create a visualization function. This will show us our grid layout with any obstacles, draw our calculated optimal path, and clearly mark our start and goal positions.
import matplotlib.pyplot as plt
def visualize_path(grid: np.ndarray, path: List[Tuple[int, int]]):
"""
Visualize the grid and found path.
"""
plt.figure(figsize=(10, 10))
plt.imshow(grid, cmap='binary')
if path:
path = np.array(path)
plt.plot(path[:, 1], path[:, 0], 'b-', linewidth=3, label='Path')
plt.plot(path[0, 1], path[0, 0], 'go', markersize=15, label='Start')
plt.plot(path[-1, 1], path[-1, 0], 'ro', markersize=15, label='Goal')
plt.grid(True)
plt.legend(fontsize=12)
plt.title("A* Pathfinding Result")
plt.show()Here's how to use the implementation:
# Create a sample grid
grid = np.zeros((20, 20)) # 20x20 grid, all free space initially
# Add some obstacles
grid[5:15, 10] = 1 # Vertical wall
grid[5, 5:15] = 1 # Horizontal wall
# Define start and goal positions
start_pos = (2, 2)
goal_pos = (18, 18)
# Find the path
path = find_path(grid, start_pos, goal_pos)
if path:
print(f"Path found with {len(path)} steps!")
visualize_path(grid, path)
else:
print("No path found!")Output
Path found with 22 steps!
This implementation is both efficient and extensible. You can easily modify it to:
In the next section, we'll look at some practical applications of this algorithm and see how it's used in real-world scenarios.
The A* algorithm's efficiency and flexibility make it valuable across numerous domains. Here are the key areas where it excels:
The A* search algorithm is extensively used in video game development due to its optimal pathfinding capabilities. It enhances the player experience by allowing for more realistic and responsive character movement.
A* is widely used in navigation systems to optimize routes, accounting for various factors like distance and potential obstacles.
The A* algorithm is crucial for robotics, where efficient movement is essential for productivity and safety.
A* is also applied in optimizing network operations, where efficiency in resource utilization and routing is paramount.
What makes A* particularly valuable is its adaptability through custom heuristic functions, allowing optimization for different metrics like distance, time, or energy usage.
In the next section, we’ll look at some common challenges and optimization techniques for implementing A* effectively.
While A* is powerful, implementing it effectively requires addressing several common challenges. The most significant hurdle developers face is managing resources efficiently, particularly when dealing with large search spaces.
The primary challenges include:
Fortunately, there are several effective optimization strategies to address these challenges:
When performance is critical, consider these speed improvements:
One particularly effective approach for large spaces is bilateral search—searching from both the start and goal simultaneously. Additionally, when working with grid-based pathfinding, you can significantly improve performance by pre-computing heuristic values or using lookup tables.
Remember to choose optimization techniques based on your specific requirements and constraints. The key is finding the right balance between memory usage and computational speed for your application.
The A* algorithm stands as a fundamental tool in pathfinding and graph traversal problems. Through this guide, we have seen its core concepts, implemented a practical solution in Python, and examined its diverse applications. The algorithm's strength lies in its balance of accuracy and efficiency, making it invaluable across various domains from gaming to robotics.
While implementing A* comes with its challenges, the optimization techniques we've discussed can help you create efficient solutions. If you're developing games, planning robot paths, or solving routing problems, then understanding the A* algorithm provides you with a powerful approach to finding optimal paths in your applications
Building such sophisticated algorithms requires a solid foundation in Python programming concepts and best practices. Want to strengthen your Python foundations and tackle more advanced algorithms like A*?
Take your programming skills to the next level with our Intermediate Python for Developers Course course, where you'll master custom functions, explore essential modules, and build sophisticated applications.
Top DataCamp Courses
Track
Course
Course
Tutorial
Bex Tuychiev
Tutorial
Amberle McKee
Tutorial
Amberle McKee
Tutorial
Bex Tuychiev
Tutorial
Mark Pedigo
Tutorial
Bex Tuychiev
