Lernpfad
Grundlagen der KI
10 Std.
Algorithmen zur Durchquerung von Graphen sind grundlegend für viele Anwendungen in der Informatik, von der Spieleentwicklung bis zur Robotik. Diese Algorithmen wurden entwickelt, um Graphen zu erforschen und durch sie zu navigieren. Graphen sind Datenstrukturen, die aus Knoten (Vertices) und Kanten bestehen. Unter diesen Algorithmen sticht der A*-Algorithmus als besonders effizienter und vielseitiger Ansatz zum Finden optimaler Pfade hervor.
Der A*-Algorithmus ist ein informierter Suchalgorithmus, das heißt, er nutzt eine heuristische Funktion, um seine Suche auf das Ziel auszurichten. Diese heuristische Funktion schätzt die Kosten für das Erreichen des Ziels von einem bestimmten Knotenpunkt aus und ermöglicht es dem Algorithmus, vielversprechende Pfade zu priorisieren und unnötige Pfade zu vermeiden.
In diesem Artikel werden wir uns die wichtigsten Konzepte des A*-Algorithmus, seine Implementierung in Python, seine Anwendungen sowie seine Vorteile und Grenzen ansehen.
Wenn du mehr über die Programmierung mit Python erfahren möchtest, schau dir unseren Kurs Einführung in Python für Entwickler Kurs.
Der A*-Algorithmus ist ein leistungsstarker und weit verbreiteter Algorithmus zur Durchquerung von Graphen und zur Pfadfindung. Es findet den kürzesten Weg zwischen einem Startknoten und einem Zielknoten in einem gewichteten Graphen.

A*-Algorithmus
Der A*-Algorithmus kombiniert die besten Aspekte von zwei anderen Algorithmen:
Stell dir vor, du versuchst, die kürzeste Route zwischen zwei Städten auf einer Karte zu finden. Während Dijkstras Algorithmus in alle Richtungen suchen würde und Best-First Search direkt auf das Ziel zusteuert (und dabei möglicherweise Abkürzungen verpasst), macht A* etwas Schlaueres. Sie berücksichtigt beides:
Diese Kombination hilft A*, fundierte Entscheidungen darüber zu treffen, welcher Weg als Nächstes erkundet werden soll, und macht es so effizient und genau.
Um den A*-Algorithmus zu verstehen, musst du mit diesen grundlegenden Konzepten vertraut sein:
Im nächsten Abschnitt werden wir uns diese Konzepte genauer ansehen und sehen, wie A* sie nutzt, um optimale Wege zu finden.
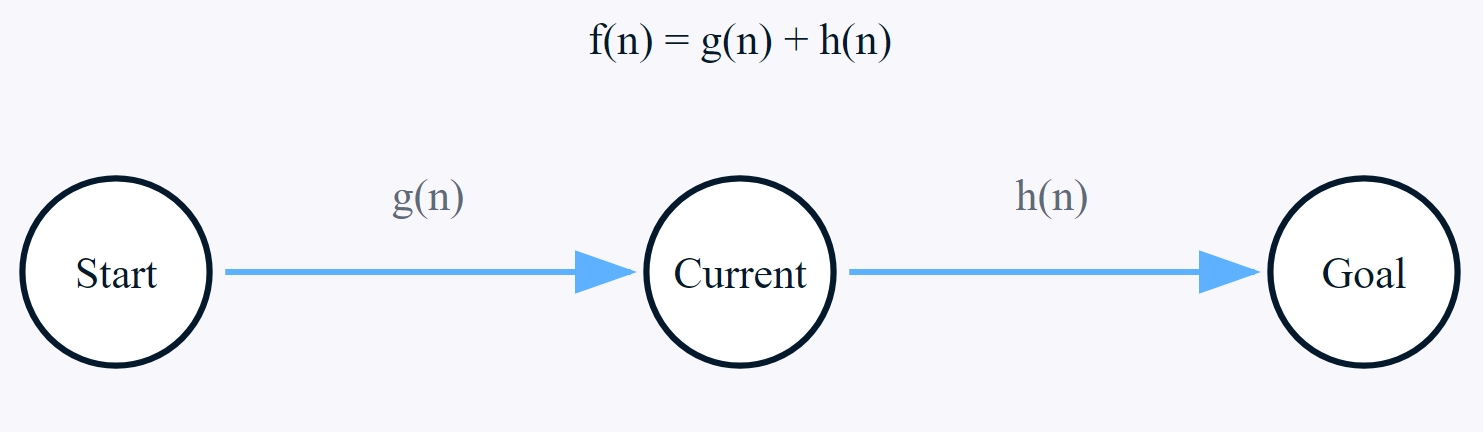
Die Effizienz des A*-Algorithmus beruht auf der intelligenten Auswertung der Pfade anhand der drei Schlüsselkomponenten g(n), h(n) und f(n). Diese Komponenten wirken zusammen, um den Suchprozess auf die vielversprechendsten Wege zu lenken.
A*-Algorithmus Kostenfunktion
Die Pfadkostenfunktion g(n) stellt die genaue, bekannte Entfernung vom anfänglichen Startknoten zur aktuellen Position in unserer Suche dar. Im Gegensatz zu den geschätzten Werten sind diese Kosten genau und werden durch die Addition aller einzelnen Kantengewichte berechnet, die entlang des gewählten Pfades durchlaufen wurden.
Mathematisch gesehen kann ein Pfad durch die Knoten n0(Startknoten) bis nk (aktueller Knoten), können wir g(n) ausdrücken als:
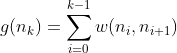
Wo:
Während wir uns durch das Diagramm bewegen, sammelt sich dieser Wert an und gibt uns ein klares Maß für die tatsächlichen Ressourcen (sei es die Entfernung, die Zeit oder eine andere Kennzahl), die wir aufgewendet haben, um unsere aktuelle Position zu erreichen.
Die heuristische Funktion h(n) gibt die geschätzten Kosten vom aktuellen Knotenpunkt zum Zielknotenpunkt an und dient dem Algorithmus als "informierte Vermutung" über den verbleibenden Weg.
Mathematisch gesehen muss die heuristische Schätzung für jeden gegebenen Knoten n die Bedingung erfüllen h(n)≤h*(n) erfüllen, wobei h*(n) die tatsächlichen Kosten für das Ziel sind, so dass es zulässig ist, die wahren Kosten nicht zu überschätzen.
Bei gitterbasierten oder kartenähnlichen Problemen sind gängige heuristische Funktionen die Manhattan-Abstand und Euklidischer Abstand. Für die Koordinaten (x1,y1) des aktuellen Knotens und (x2,y2) des Zielknotens, werden diese Entfernungen wie folgt berechnet:
![]()
![]()
Die geschätzten Gesamtkosten f(n) sind der Eckpfeiler des Entscheidungsprozesses des A*-Algorithmus, der sowohl die tatsächlichen Pfadkosten als auch die heuristische Schätzung kombiniert, um das Potenzial eines jeden Knotens zu bewerten. Für jeden Knoten n werden diese Kosten wie folgt berechnet:
![]()
Wo:
Der Algorithmus verwendet diesen kombinierten Wert, um strategisch zu entscheiden, welcher Knoten als Nächstes erkundet werden soll, wobei er immer den Knoten mit dem niedrigsten f(n) Wert aus der offenen Liste und sorgt so für ein optimales Gleichgewicht zwischen den bekannten Kosten und den geschätzten verbleibenden Entfernungen.
Der A*-Algorithmus unterhält zwei wesentliche Listen
Offene Liste:
Geschlossene Liste:
Der Algorithmus wählt kontinuierlich den Knoten mit dem niedrigsten f(n) Wert aus der offenen Liste, wertet ihn aus und verschiebt ihn in die geschlossene Liste, bis er den Zielknoten erreicht oder feststellt, dass kein Pfad existiert.
Nachdem wir nun die grundlegenden Komponenten von A* verstanden haben, wollen wir sehen, wie sie in der Praxis zusammenkommen. Die Umsetzung des Algorithmus kann in klare, logische Schritte zerlegt werden, die diese Konzepte in eine funktionierende Lösung zur Wegfindung umwandeln.
Hier siehst du, wie der Algorithmus Schritt für Schritt funktioniert:
function A_Star(start, goal):
// Initialize open and closed lists
openList = [start] // Nodes to be evaluated
closedList = [] // Nodes already evaluated
// Initialize node properties
start.g = 0 // Cost from start to start is 0
start.h = heuristic(start, goal) // Estimate to goal
start.f = start.g + start.h // Total estimated cost
start.parent = null // For path reconstruction
while openList is not empty:
// Get node with lowest f value - implement using a priority queue
// for faster retrieval of the best node
current = node in openList with lowest f value
// Check if we've reached the goal
if current = goal:
return reconstruct_path(current)
// Move current node from open to closed list
remove current from openList
add current to closedList
// Check all neighboring nodes
for each neighbor of current:
if neighbor in closedList:
continue // Skip already evaluated nodes
// Calculate tentative g score
tentative_g = current.g + distance(current, neighbor)
if neighbor not in openList:
add neighbor to openList
else if tentative_g >= neighbor.g:
continue // This path is not better
// This path is the best so far
neighbor.parent = current
neighbor.g = tentative_g
neighbor.h = heuristic(neighbor, goal)
neighbor.f = neighbor.g + neighbor.h
return failure // No path exists
function reconstruct_path(current):
path = []
while current is not null:
add current to beginning of path
current = current.parent
return pathSchauen wir uns die einzelnen Komponenten dieser Umsetzung an:
Der Algorithmus beginnt mit der Erstellung von zwei wichtigen Listen:
Jeder Knotenpunkt speichert vier wichtige Informationen:
Der Kern von A* ist die Hauptschleife, die so lange läuft, bis entweder:
Während jeder Iteration wird der Algorithmus:
Für jeden Nachbarn wird der Algorithmus:
Sobald das Ziel erreicht ist, arbeitet sich der Algorithmus rückwärts durch die übergeordneten Referenzen, um den optimalen Pfad vom Start zum Ziel zu konstruieren.
Dieser systematische Ansatz stellt sicher, dass A* immer den optimalen Weg findet, wenn:
Im nächsten Abschnitt übersetzen wir diesen Pseudocode in eine praktische Python-Implementierung mit Visualisierungen, die dir zeigen, wie der Algorithmus den Suchraum erkundet.
Nachdem wir nun die Theorie und den Pseudocode verstanden haben, wollen wir A* in Python implementieren. Wir erstellen eine praktische Umsetzung, die du als Grundlage für deine eigenen Projekte nutzen kannst. Um dies zu verdeutlichen, werden wir den Algorithmus auf einem 2D-Gitter implementieren - ein übliches Szenario in Spielen und Robotik-Anwendungen.
Zuerst importieren wir die notwendigen Bibliotheken und erstellen eine Knotenstruktur, in der wir die Positions- und Pfadfindungsinformationen für jeden Punkt in unserem Suchraum speichern.
from typing import List, Tuple, Dict, Set
import numpy as np
import heapq
from math import sqrt
def create_node(position: Tuple[int, int], g: float = float('inf'),
h: float = 0.0, parent: Dict = None) -> Dict:
"""
Create a node for the A* algorithm.
Args:
position: (x, y) coordinates of the node
g: Cost from start to this node (default: infinity)
h: Estimated cost from this node to goal (default: 0)
parent: Parent node (default: None)
Returns:
Dictionary containing node information
"""
return {
'position': position,
'g': g,
'h': h,
'f': g + h,
'parent': parent
}Um unseren Pfadfindungsalgorithmus zu unterstützen, werden wir mehrere Hilfsfunktionen erstellen. Zuerst werden wir eine Funktion implementieren, die Abstände zwischen Punkten mithilfe des euklidischen Abstands berechnet.
Dann fügen wir eine Funktion hinzu, die gültige Nachbarpositionen in unserem Raster findet und dabei Grenzen und Hindernisse sorgfältig prüft. Zum Schluss erstellen wir eine Funktion, die uns hilft, den Weg zu rekonstruieren, wenn wir unser Ziel gefunden haben.
def calculate_heuristic(pos1: Tuple[int, int], pos2: Tuple[int, int]) -> float:
"""
Calculate the estimated distance between two points using Euclidean distance.
"""
x1, y1 = pos1
x2, y2 = pos2
return sqrt((x2 - x1)**2 + (y2 - y1)**2)
def get_valid_neighbors(grid: np.ndarray, position: Tuple[int, int]) -> List[Tuple[int, int]]:
"""
Get all valid neighboring positions in the grid.
Args:
grid: 2D numpy array where 0 represents walkable cells and 1 represents obstacles
position: Current position (x, y)
Returns:
List of valid neighboring positions
"""
x, y = position
rows, cols = grid.shape
# All possible moves (including diagonals)
possible_moves = [
(x+1, y), (x-1, y), # Right, Left
(x, y+1), (x, y-1), # Up, Down
(x+1, y+1), (x-1, y-1), # Diagonal moves
(x+1, y-1), (x-1, y+1)
]
return [
(nx, ny) for nx, ny in possible_moves
if 0 <= nx < rows and 0 <= ny < cols # Within grid bounds
and grid[nx, ny] == 0 # Not an obstacle
]
def reconstruct_path(goal_node: Dict) -> List[Tuple[int, int]]:
"""
Reconstruct the path from goal to start by following parent pointers.
"""
path = []
current = goal_node
while current is not None:
path.append(current['position'])
current = current['parent']
return path[::-1] # Reverse to get path from start to goalNun wollen wir unseren Algorithmus implementieren. Wir verwenden eine Prioritäts-Warteschlange, um sicherzustellen, dass wir immer die vielversprechendsten Wege zuerst erkunden.
Unser Algorithmus behält zwei Mengen bei: eine offene Menge für Knoten, die wir noch untersuchen müssen, und eine geschlossene Menge für Knoten, die wir bereits überprüft haben.
Während wir das Netz erkunden, aktualisieren wir die Pfadkosten kontinuierlich, wenn wir bessere Routen finden, bis wir unser Ziel erreichen.
def find_path(grid: np.ndarray, start: Tuple[int, int],
goal: Tuple[int, int]) -> List[Tuple[int, int]]:
"""
Find the optimal path using A* algorithm.
Args:
grid: 2D numpy array (0 = free space, 1 = obstacle)
start: Starting position (x, y)
goal: Goal position (x, y)
Returns:
List of positions representing the optimal path
"""
# Initialize start node
start_node = create_node(
position=start,
g=0,
h=calculate_heuristic(start, goal)
)
# Initialize open and closed sets
open_list = [(start_node['f'], start)] # Priority queue
open_dict = {start: start_node} # For quick node lookup
closed_set = set() # Explored nodes
while open_list:
# Get node with lowest f value
_, current_pos = heapq.heappop(open_list)
current_node = open_dict[current_pos]
# Check if we've reached the goal
if current_pos == goal:
return reconstruct_path(current_node)
closed_set.add(current_pos)
# Explore neighbors
for neighbor_pos in get_valid_neighbors(grid, current_pos):
# Skip if already explored
if neighbor_pos in closed_set:
continue
# Calculate new path cost
tentative_g = current_node['g'] + calculate_heuristic(current_pos, neighbor_pos)
# Create or update neighbor
if neighbor_pos not in open_dict:
neighbor = create_node(
position=neighbor_pos,
g=tentative_g,
h=calculate_heuristic(neighbor_pos, goal),
parent=current_node
)
heapq.heappush(open_list, (neighbor['f'], neighbor_pos))
open_dict[neighbor_pos] = neighbor
elif tentative_g < open_dict[neighbor_pos]['g']:
# Found a better path to the neighbor
neighbor = open_dict[neighbor_pos]
neighbor['g'] = tentative_g
neighbor['f'] = tentative_g + neighbor['h']
neighbor['parent'] = current_node
return [] # No path foundJetzt wollen wir eine Visualisierungsfunktion erstellen. Das zeigt uns unser Raster mit allen Hindernissen, zeichnet unseren berechneten optimalen Pfad und markiert deutlich unsere Start- und Zielposition.
import matplotlib.pyplot as plt
def visualize_path(grid: np.ndarray, path: List[Tuple[int, int]]):
"""
Visualize the grid and found path.
"""
plt.figure(figsize=(10, 10))
plt.imshow(grid, cmap='binary')
if path:
path = np.array(path)
plt.plot(path[:, 1], path[:, 0], 'b-', linewidth=3, label='Path')
plt.plot(path[0, 1], path[0, 0], 'go', markersize=15, label='Start')
plt.plot(path[-1, 1], path[-1, 0], 'ro', markersize=15, label='Goal')
plt.grid(True)
plt.legend(fontsize=12)
plt.title("A* Pathfinding Result")
plt.show()Hier erfährst du, wie du die Implementierung nutzen kannst:
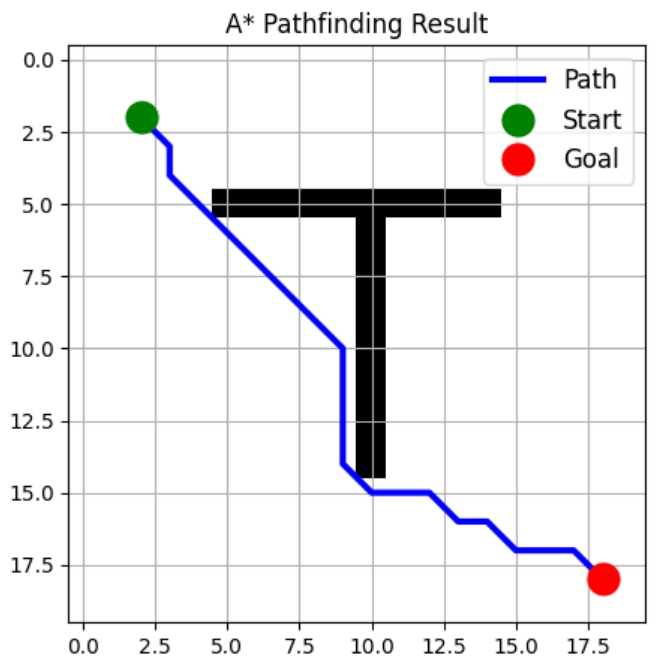
# Create a sample grid
grid = np.zeros((20, 20)) # 20x20 grid, all free space initially
# Add some obstacles
grid[5:15, 10] = 1 # Vertical wall
grid[5, 5:15] = 1 # Horizontal wall
# Define start and goal positions
start_pos = (2, 2)
goal_pos = (18, 18)
# Find the path
path = find_path(grid, start_pos, goal_pos)
if path:
print(f"Path found with {len(path)} steps!")
visualize_path(grid, path)
else:
print("No path found!")Ausgabe
Pfad mit 22 Schritten gefunden!
Diese Implementierung ist sowohl effizient als auch erweiterbar. Du kannst es ganz einfach ändern:
Im nächsten Abschnitt werden wir uns einige praktische Anwendungen dieses Algorithmus ansehen und sehen, wie er in der Praxis eingesetzt wird.
Die Effizienz und Flexibilität des A*-Algorithmus machen ihn in vielen Bereichen wertvoll. Hier sind die wichtigsten Bereiche, in denen es sich auszeichnet:
Der A*-Suchalgorithmus wird in der Entwicklung von Videospielen häufig eingesetzt, da er eine optimale Wegfindung ermöglicht. Sie verbessert das Spielerlebnis, indem sie realistischere und reaktionsschnellere Charakterbewegungen ermöglicht.
A* wird häufig in Navigationssystemen verwendet, um Routen zu optimieren und dabei verschiedene Faktoren wie Entfernungen und mögliche Hindernisse zu berücksichtigen.
Der A*-Algorithmus ist entscheidend für die Robotik, in der effiziente Bewegungen für Produktivität und Sicherheit unerlässlich sind.
A* wird auch bei der Optimierung des Netzwerkbetriebs eingesetzt, wo die Effizienz der Ressourcennutzung und des Routings im Vordergrund steht.
Was A* besonders wertvoll macht, ist seine Anpassungsfähigkeit durch benutzerdefinierte heuristische Funktionen, die eine Optimierung für verschiedene Metriken wie Entfernung, Zeit oder Energieverbrauch ermöglichen.
Im nächsten Abschnitt sehen wir uns einige häufige Herausforderungen und Optimierungstechniken an, um A* effektiv umzusetzen.
A* ist zwar sehr leistungsfähig, aber um es effektiv umzusetzen, müssen mehrere gemeinsame Herausforderungen bewältigt werden. Die größte Hürde für Entwickler ist die effiziente Verwaltung von Ressourcen, insbesondere bei großen Suchräumen.
Zu den wichtigsten Herausforderungen gehören:
Zum Glück gibt es mehrere effektive Optimierungsstrategien, um diese Herausforderungen zu meistern:
Wenn die Leistung entscheidend ist, solltest du diese Geschwindigkeitsverbesserungen in Betracht ziehen:
Ein besonders effektiver Ansatz für große Räume ist die bilaterale Suche - die gleichzeitige Suche von Start und Ziel. Außerdem kannst du bei der gitterbasierten Pfadfindung die Leistung erheblich verbessern, indem du heuristische Werte vorberechnest oder Tabellen verwendest.
Denke daran, Optimierungsverfahren auf der Grundlage deiner spezifischen Anforderungen und Beschränkungen auszuwählen. Der Schlüssel liegt darin, die richtige Balance zwischen Speichernutzung und Rechengeschwindigkeit für deine Anwendung zu finden.
Der A*-Algorithmus ist ein grundlegendes Werkzeug bei der Pfadfindung und bei Problemen mit der Durchquerung von Graphen. In diesem Leitfaden haben wir die Kernkonzepte kennengelernt, eine praktische Lösung in Python implementiert und die verschiedenen Anwendungsmöglichkeiten untersucht. Die Stärke des Algorithmus liegt in der Ausgewogenheit von Genauigkeit und Effizienz, was ihn in verschiedenen Bereichen von Spielen bis hin zur Robotik von unschätzbarem Wert macht.
Die Umsetzung von A* bringt zwar einige Herausforderungen mit sich, aber die besprochenen Optimierungstechniken können dir helfen, effiziente Lösungen zu finden. Wenn du Spiele entwickelst, Roboterpfade planst oder Routing-Probleme löst, dann bietet dir das Verständnis des A*-Algorithmus einen leistungsstarken Ansatz, um optimale Pfade in deinen Anwendungen zu finden
Die Entwicklung solch anspruchsvoller Algorithmen erfordert eine solide Grundlage in Python-Programmierkonzepten und Best Practices. Willst du deine Python-Grundlagen stärken und fortgeschrittene Algorithmen wie A* in Angriff nehmen?
Bring deine Programmierkenntnisse auf die nächste Stufe mit unserem Mittelstufenkurs Python für Entwickler in dem du benutzerdefinierte Funktionen beherrschst, wichtige Module kennenlernst und anspruchsvolle Anwendungen erstellst.
Top DataCamp Kurse
Lernpfad
Kurs
Kurs
Tutorial
Mark Pedigo
Tutorial
Derrick Mwiti
Tutorial
Laiba Siddiqui
Tutorial
Matt Crabtree
Tutorial
DataCamp Team
Tutorial
Neetika Khandelwal