Program
AI Temelleri
10 sa
Graf geçiş algoritmaları, oyun geliştirmeden robotiklere kadar pek çok bilgisayar bilimi uygulamasının temelini oluşturur. Bu algoritmalar, düğümler (tepe noktaları) ve kenarlardan oluşan veri yapıları olan grafları keşfetmek ve içinde gezinmek için tasarlanmıştır. Bu algoritmalar arasında A* algoritması, en iyi yolları bulmak için özellikle verimli ve çok yönlü bir yaklaşım olarak öne çıkar.
A* algoritması, aramasını hedefe doğru yönlendirmek için sezgisel (heuristic) bir fonksiyondan yararlanan bilgilendirilmiş (informed) bir arama algoritmasıdır. Bu sezgisel fonksiyon, belirli bir düğümden hedefe ulaşmanın maliyetini tahmin eder ve algoritmanın umut vadeden yolları önceliklendirmesine, gereksiz olanları ise elemesine olanak tanır.
Bu yazıda, A* algoritmasının temel kavramlarına, Python’daki uygulamasına, kullanım alanlarına ve avantajları ile sınırlarına bakacağız.
Python programlamayı daha fazla öğrenmek için Geliştiriciler için Python’a Giriş Kursu kursumuza göz atın.
A* algoritması, güçlü ve yaygın olarak kullanılan bir graf geçişi ve yol bulma algoritmasıdır. Ağırlıklı bir graf içinde başlangıç düğümü ile hedef düğüm arasında en kısa yolu bulur.

A* algoritması
A* algoritması, iki algoritmanın en iyi yönlerini birleştirir:
Bir haritada iki şehir arasındaki en kısa rotayı bulmaya çalıştığınızı düşünün. Dijkstra algoritması her yöne doğru keşif yaparken, En-İyi-Önce Arama doğrudan hedefe yönelebilir (kestirmeleri kaçırma pahasına). A* ise daha akıllıca davranır. Şunları birlikte dikkate alır:
Bu birleşim, A*’ın hangi yolu sonraki adımda keşfedeceğine dair bilinçli kararlar almasını sağlar; böylece hem verimli hem de isabetlidir.
A* algoritmasını anlamak için şu temel kavramlara aşina olmanız gerekir:
Bir sonraki bölümde bu kavramları daha derinlemesine inceleyip A*’ın bunları en uygun yolları bulmak için nasıl kullandığını göreceğiz.
A* algoritmasının verimliliği, yolları üç ana bileşenle akıllıca değerlendirmesinden gelir: g(n), h(n) ve f(n). Bu bileşenler, arama sürecini en umut verici yollara yönlendirmek için birlikte çalışır.
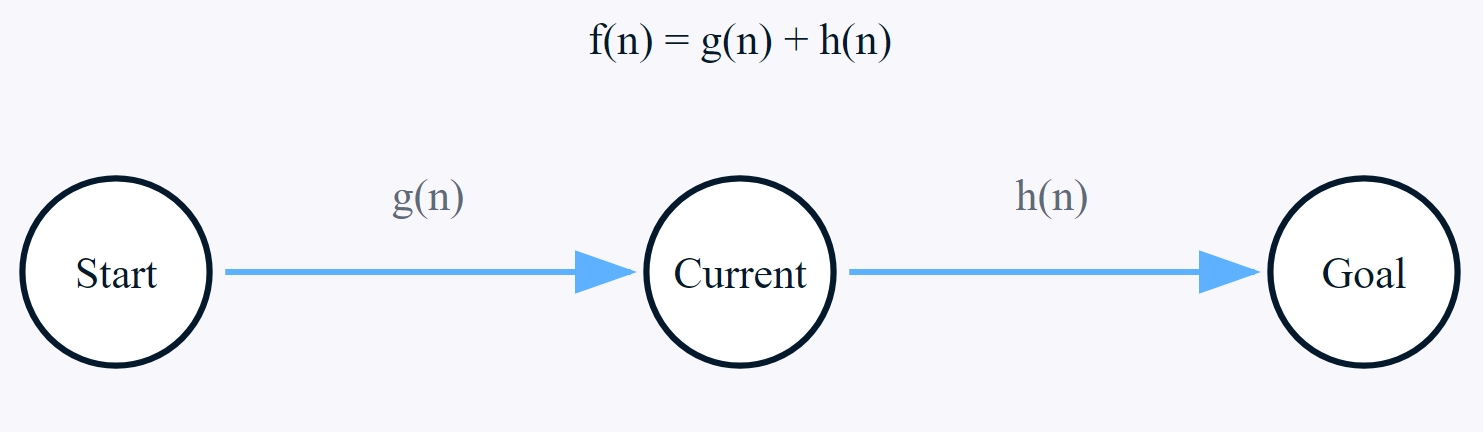
A* algoritması Maliyet Fonksiyonu
g(n) yol maliyeti fonksiyonu, aramamızda ilk başlangıç düğümünden mevcut konuma kadar olan kesin, bilinen mesafeyi temsil eder. Tahmini değerlere kıyasla bu maliyet kesindir ve seçilen yol boyunca geçilen tüm bireysel kenar ağırlıkları toplanarak hesaplanır.
Matematiksel olarak, n0 (başlangıç düğümü) ile nk (mevcut düğüm) üzerinden giden bir yol için g(n) şöyle ifade edilebilir:
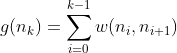
Burada:
Graf içinde ilerledikçe bu değer birikir ve mevcut konumumuza ulaşmak için harcadığımız gerçek kaynakların (mesafe, zaman veya başka bir ölçüt) net bir ölçüsünü verir.
h(n) sezgisel fonksiyonu, mevcut düğümden hedef düğüme olan tahmini maliyeti sağlar ve algoritmanın kalan yol hakkında “bilgilendirilmiş bir tahmin” yapmasını sağlar.
Matematiksel olarak, herhangi bir n düğümü için sezgisel tahmin şu koşulu sağlamalıdır: h(n)≤h*(n) ; burada h*(n) hedefe gerçek maliyettir. Gerçek maliyeti asla abartmayarak h(n)’i kabul edilebilir (admissible) kılar.
Izgara tabanlı veya harita benzeri problemlerde yaygın sezgisel fonksiyonlar Manhattan mesafesi ve Öklidyen mesafedir. Mevcut düğümün koordinatları (x1,y1) ve hedef düğümün koordinatları (x2,y2) olduğunda bu mesafeler şöyle hesaplanır:
![]()
![]()
Toplam tahmini maliyet f(n), A* algoritmasının karar verme sürecinin temel taşıdır; her bir düğümün potansiyelini değerlendirmek için hem gerçek yol maliyetini hem de sezgisel tahmini birleştirir. Herhangi bir n düğümü için bu maliyet şöyle hesaplanır:
![]()
Burada:
Algoritma bu birleşik değeri kullanarak stratejik biçimde bir sonraki keşfedilecek düğümü seçer; açık listeden her zaman en düşük f(n) değerine sahip olanı tercih ederek bilinen maliyetler ile kalan mesafelerin tahmini arasında en iyi dengeyi kurar.
A* algoritması iki temel liste tutar
Açık liste:
Kapalı liste:
Algoritma, açık listeden en düşük f(n) değerine sahip düğümü seçmeye, onu değerlendirmeye ve hedefe ulaşana veya yolun olmadığını belirleyene kadar kapalı listeye taşımaya devam eder.
Artık A*’ın temel bileşenlerini anladığımıza göre, bunların pratikte nasıl bir araya geldiğine bakalım. Algoritmanın uygulanışı, bu kavramları çalışan bir yol bulma çözümüne dönüştüren açık ve mantıksal adımlara ayrılabilir.
Algoritma adım adım şöyle çalışır:
function A_Star(start, goal):
// Initialize open and closed lists
openList = [start] // Nodes to be evaluated
closedList = [] // Nodes already evaluated
// Initialize node properties
start.g = 0 // Cost from start to start is 0
start.h = heuristic(start, goal) // Estimate to goal
start.f = start.g + start.h // Total estimated cost
start.parent = null // For path reconstruction
while openList is not empty:
// Get node with lowest f value - implement using a priority queue
// for faster retrieval of the best node
current = node in openList with lowest f value
// Check if we've reached the goal
if current = goal:
return reconstruct_path(current)
// Move current node from open to closed list
remove current from openList
add current to closedList
// Check all neighboring nodes
for each neighbor of current:
if neighbor in closedList:
continue // Skip already evaluated nodes
// Calculate tentative g score
tentative_g = current.g + distance(current, neighbor)
if neighbor not in openList:
add neighbor to openList
else if tentative_g >= neighbor.g:
continue // This path is not better
// This path is the best so far
neighbor.parent = current
neighbor.g = tentative_g
neighbor.h = heuristic(neighbor, goal)
neighbor.f = neighbor.g + neighbor.h
return failure // No path exists
function reconstruct_path(current):
path = []
while current is not null:
add current to beginning of path
current = current.parent
return pathBu uygulamanın her bir bileşenini parçalara ayıralım:
Algoritma iki temel listeyi oluşturarak başlar:
Her düğüm dört kritik bilgiyi saklar:
A*’ın özü, şu durumlardan biri gerçekleşene kadar devam eden ana döngüsüdür:
Her yinelemede algoritma:
Her komşu için algoritma:
Hedefe ulaşıldığında, algoritma başlangıçtan hedefe en iyi yolu oluşturmak için ebeveyn referanslarını geriye doğru izler.
Bu sistematik yaklaşım, şu koşullarda A*’ın her zaman en uygun yolu bulmasını sağlar:
Bir sonraki bölümde, bu sözde kodu pratik bir Python uygulamasına çevirecek ve algoritmanın arama uzayını nasıl keşfettiğini anlamanıza yardımcı olmak için görselleştirmeler ekleyeceğiz.
Artık teori ve sözde kodu anladığımıza göre, A*’ı Python’da uygulayalım. Kendi projeleriniz için temel alabileceğiniz pratik bir uygulama oluşturacağız. Bunu somutlaştırmak için, oyunlar ve robotik uygulamalarda yaygın bir senaryo olan 2B bir ızgara üzerinde algoritmayı uygulayacağız.
Önce gerekli kütüphaneleri içe aktarır ve arama uzayımızdaki her nokta için konum ve yol bulma bilgilerini tutacak bir düğüm yapısı oluştururuz.
from typing import List, Tuple, Dict, Set
import numpy as np
import heapq
from math import sqrt
def create_node(position: Tuple[int, int], g: float = float('inf'),
h: float = 0.0, parent: Dict = None) -> Dict:
"""
Create a node for the A* algorithm.
Args:
position: (x, y) coordinates of the node
g: Cost from start to this node (default: infinity)
h: Estimated cost from this node to goal (default: 0)
parent: Parent node (default: None)
Returns:
Dictionary containing node information
"""
return {
'position': position,
'g': g,
'h': h,
'f': g + h,
'parent': parent
}Yol bulma algoritmamızı desteklemek için birkaç yardımcı fonksiyon oluşturacağız. Önce, Öklidyen mesafeyi kullanarak noktalar arasındaki mesafeyi hesaplayan bir fonksiyon uygulayacağız.
Ardından, ızgaramızda geçerli komşu konumları bulan, sınırları ve engelleri dikkatle kontrol eden bir fonksiyon ekleyeceğiz. Son olarak, hedefi bulduğumuzda yolu yeniden inşa etmemize yardımcı olan bir fonksiyon yazacağız.
def calculate_heuristic(pos1: Tuple[int, int], pos2: Tuple[int, int]) -> float:
"""
Calculate the estimated distance between two points using Euclidean distance.
"""
x1, y1 = pos1
x2, y2 = pos2
return sqrt((x2 - x1)**2 + (y2 - y1)**2)
def get_valid_neighbors(grid: np.ndarray, position: Tuple[int, int]) -> List[Tuple[int, int]]:
"""
Get all valid neighboring positions in the grid.
Args:
grid: 2D numpy array where 0 represents walkable cells and 1 represents obstacles
position: Current position (x, y)
Returns:
List of valid neighboring positions
"""
x, y = position
rows, cols = grid.shape
# All possible moves (including diagonals)
possible_moves = [
(x+1, y), (x-1, y), # Right, Left
(x, y+1), (x, y-1), # Up, Down
(x+1, y+1), (x-1, y-1), # Diagonal moves
(x+1, y-1), (x-1, y+1)
]
return [
(nx, ny) for nx, ny in possible_moves
if 0 <= nx < rows and 0 <= ny < cols # Within grid bounds
and grid[nx, ny] == 0 # Not an obstacle
]
def reconstruct_path(goal_node: Dict) -> List[Tuple[int, int]]:
"""
Reconstruct the path from goal to start by following parent pointers.
"""
path = []
current = goal_node
while current is not None:
path.append(current['position'])
current = current['parent']
return path[::-1] # Reverse to get path from start to goalŞimdi algoritmamızı uygulayalım. Her zaman en umut verici yolları önce keşfettiğimizden emin olmak için bir öncelik kuyruğu kullanacağız.
Algoritmamız iki küme tutacak: keşfedilmesi gereken düğümler için bir açık küme ve zaten kontrol ettiklerimiz için bir kapalı küme.
Izgara içinde dolaşırken, hedefimize ulaşana kadar daha iyi rotalar bulduğumuzda yol maliyetlerini sürekli güncelleyeceğiz.
def find_path(grid: np.ndarray, start: Tuple[int, int],
goal: Tuple[int, int]) -> List[Tuple[int, int]]:
"""
Find the optimal path using A* algorithm.
Args:
grid: 2D numpy array (0 = free space, 1 = obstacle)
start: Starting position (x, y)
goal: Goal position (x, y)
Returns:
List of positions representing the optimal path
"""
# Initialize start node
start_node = create_node(
position=start,
g=0,
h=calculate_heuristic(start, goal)
)
# Initialize open and closed sets
open_list = [(start_node['f'], start)] # Priority queue
open_dict = {start: start_node} # For quick node lookup
closed_set = set() # Explored nodes
while open_list:
# Get node with lowest f value
_, current_pos = heapq.heappop(open_list)
current_node = open_dict[current_pos]
# Check if we've reached the goal
if current_pos == goal:
return reconstruct_path(current_node)
closed_set.add(current_pos)
# Explore neighbors
for neighbor_pos in get_valid_neighbors(grid, current_pos):
# Skip if already explored
if neighbor_pos in closed_set:
continue
# Calculate new path cost
tentative_g = current_node['g'] + calculate_heuristic(current_pos, neighbor_pos)
# Create or update neighbor
if neighbor_pos not in open_dict:
neighbor = create_node(
position=neighbor_pos,
g=tentative_g,
h=calculate_heuristic(neighbor_pos, goal),
parent=current_node
)
heapq.heappush(open_list, (neighbor['f'], neighbor_pos))
open_dict[neighbor_pos] = neighbor
elif tentative_g < open_dict[neighbor_pos]['g']:
# Found a better path to the neighbor
neighbor = open_dict[neighbor_pos]
neighbor['g'] = tentative_g
neighbor['f'] = tentative_g + neighbor['h']
neighbor['parent'] = current_node
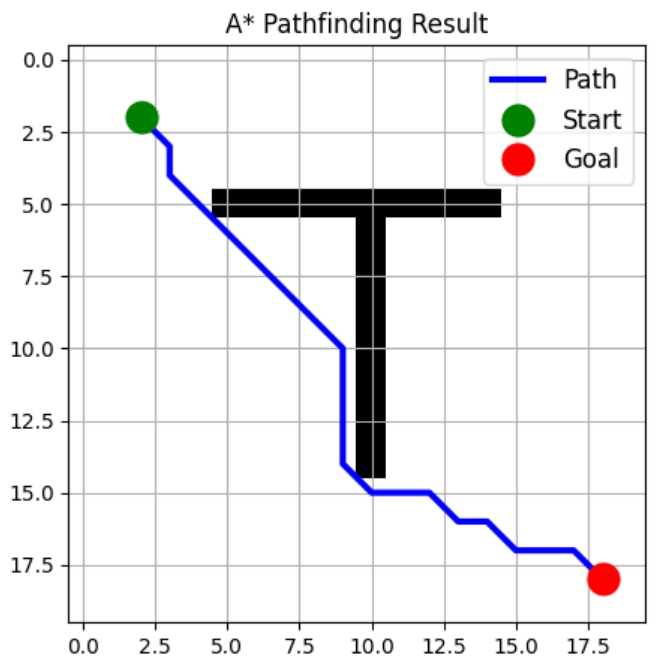
return [] # No path foundŞimdi bir görselleştirme fonksiyonu oluşturalım. Bu fonksiyon, ızgara düzenimizi ve engelleri gösterecek, hesaplanan en iyi yolu çizecek ve başlangıç ile hedef konumlarını net biçimde işaretleyecek.
import matplotlib.pyplot as plt
def visualize_path(grid: np.ndarray, path: List[Tuple[int, int]]):
"""
Visualize the grid and found path.
"""
plt.figure(figsize=(10, 10))
plt.imshow(grid, cmap='binary')
if path:
path = np.array(path)
plt.plot(path[:, 1], path[:, 0], 'b-', linewidth=3, label='Path')
plt.plot(path[0, 1], path[0, 0], 'go', markersize=15, label='Start')
plt.plot(path[-1, 1], path[-1, 0], 'ro', markersize=15, label='Goal')
plt.grid(True)
plt.legend(fontsize=12)
plt.title("A* Pathfinding Result")
plt.show()Uygulamayı şu şekilde kullanabilirsiniz:
# Create a sample grid
grid = np.zeros((20, 20)) # 20x20 grid, all free space initially
# Add some obstacles
grid[5:15, 10] = 1 # Vertical wall
grid[5, 5:15] = 1 # Horizontal wall
# Define start and goal positions
start_pos = (2, 2)
goal_pos = (18, 18)
# Find the path
path = find_path(grid, start_pos, goal_pos)
if path:
print(f"Path found with {len(path)} steps!")
visualize_path(grid, path)
else:
print("No path found!")Çıktı
Path found with 22 steps!
Bu uygulama hem verimli hem de genişletilebilirdir. Kolayca şunlar için uyarlayabilirsiniz:
Bir sonraki bölümde bu algoritmanın bazı pratik uygulamalarına bakacak ve gerçek dünyada nasıl kullanıldığını göreceğiz.
A* algoritmasının verimliliği ve esnekliği onu birçok alanda değerli kılar. Öne çıktığı başlıca alanlar şunlardır:
A* arama algoritması, en uygun yol bulma yetenekleri nedeniyle video oyunu geliştirmede yaygın olarak kullanılır. Karakter hareketini daha gerçekçi ve tepkisel hale getirerek oyuncu deneyimini iyileştirir.
A*, mesafe ve olası engeller gibi çeşitli etmenleri hesaba katarak rotaları eniyilemek için navigasyon sistemlerinde yaygın biçimde kullanılır.
A* algoritması, verimli hareketin üretkenlik ve güvenlik için kritik olduğu robotik alanında hayati öneme sahiptir.
A*, kaynak kullanımı ve yönlendirme verimliliğinin kritik olduğu ağ operasyonlarının eniyilenmesinde de uygulanır.
A*’ı özellikle değerli kılan, sezgisel fonksiyonların özelleştirilebilir olmasıdır; böylece mesafe, zaman veya enerji kullanımı gibi farklı ölçütlere göre eniyileme yapılabilir.
Bir sonraki bölümde, A*’ı etkili biçimde uygulamak için yaygın zorluklara ve eniyileme tekniklerine bakacağız.
A* güçlü olsa da, onu etkili biçimde uygulamak bazı yaygın zorluklarla başa çıkmayı gerektirir. Geliştiricilerin karşılaştığı en önemli engel, özellikle büyük arama uzaylarında kaynakları verimli yönetmektir.
Başlıca zorluklar şunlardır:
Neyse ki bu zorlukları aşmak için çeşitli etkili eniyileme stratejileri vardır:
Performans kritik olduğunda şu hız iyileştirmelerini düşünün:
Geniş alanlar için özellikle etkili bir yaklaşım çift yönlü (bilateral) aramadır—aramayı hem başlangıçtan hem de hedeften eşzamanlı başlatmak. Ayrıca ızgara tabanlı yol bulmada sezgisel değerleri önceden hesaplamak veya arama tabloları (lookup table) kullanmak performansı önemli ölçüde artırabilir.
Gereksinimlerinize ve kısıtlarınıza göre eniyileme teknikleri seçtiğinizi unutmayın. Esas olan, uygulamanız için bellek kullanımı ile hesaplama hızı arasında doğru dengeyi bulmaktır.
A* algoritması, yol bulma ve graf geçişi problemlerinde temel bir araçtır. Bu rehber boyunca temel kavramlarını gördük, Python’da pratik bir çözüm uyguladık ve çeşitli kullanım alanlarını inceledik. Algoritmanın gücü, doğruluk ve verimlilik arasındaki dengesinde yatar; bu da onu oyundan robotiğe kadar farklı alanlarda vazgeçilmez kılar.
A*’ı uygulamak bazı zorluklar içerse de, tartıştığımız eniyileme teknikleri verimli çözümler oluşturmanıza yardımcı olabilir. Oyun geliştiriyor, robot yolları planlıyor veya yönlendirme problemleri çözüyor olun; A* algoritmasını anlamak, uygulamalarınızda en uygun yolları bulmak için güçlü bir yaklaşım sunar
Bu denli gelişmiş algoritmalar inşa etmek, Python programlama kavramları ve en iyi uygulamalar konusunda sağlam bir temel gerektirir. Python temellerinizi güçlendirip A* gibi daha ileri algoritmalarla başa çıkmak ister misiniz?
Programlama becerilerinizi bir üst seviyeye taşıyın: Geliştiriciler için Orta Düzey Python Kursu ile özel fonksiyonları öğrenin, temel modülleri keşfedin ve gelişmiş uygulamalar geliştirin.
En İyi DataCamp Kursları
Program
Kurs
Kurs
blog
Dario Radečić
15 dk.
blog
Abid Ali Awan
14 dk.
Eğitim
Adel Nehme
Eğitim
Kurtis Pykes
