Programa
Fundamentos da IA
10 h
Os algoritmos de travessia de gráficos são fundamentais para muitos aplicativos de ciência da computação, desde o desenvolvimento de jogos até a robótica. Esses algoritmos são projetados para explorar e navegar em gráficos, que são estruturas de dados compostas de nós (vértices) e bordas. Entre esses algoritmos, o algoritmo A* se destaca como uma abordagem particularmente eficiente e versátil para encontrar caminhos ideais.
O algoritmo A* é um algoritmo de busca informado, o que significa que ele utiliza uma função heurística para orientar sua busca em direção à meta. Essa função heurística estima o custo de alcançar a meta a partir de um determinado nó, permitindo que o algoritmo priorize caminhos promissores e evite explorar caminhos desnecessários.
Neste artigo, veremos os principais conceitos do algoritmo A*, sua implementação em Python, suas aplicações e suas vantagens e limitações.
Para saber mais sobre programação em Python, confira nosso Curso de introdução ao Python para desenvolvedores curso.
O algoritmo A* é um algoritmo avançado e amplamente usado para atravessar gráficos e encontrar caminhos. Ele encontra o caminho mais curto entre um nó inicial e um nó de meta em um gráfico ponderado.

Algoritmo A*
O algoritmo A* combina os melhores aspectos de dois outros algoritmos:
Imagine que você está tentando encontrar a rota mais curta entre duas cidades em um mapa. Enquanto o algoritmo de Dijkstra exploraria em todas as direções e a busca do melhor primeiro poderia ir direto para o destino (possivelmente perdendo atalhos), o A* faz algo mais inteligente. Ele considera ambos:
Essa combinação ajuda a A* a tomar decisões informadas sobre o próximo caminho a ser explorado, tornando-a eficiente e precisa.
Para entender o algoritmo A*, você precisa estar familiarizado com esses conceitos fundamentais:
Na próxima seção, analisaremos mais detalhadamente esses conceitos e veremos como o A* os utiliza para encontrar caminhos ideais.
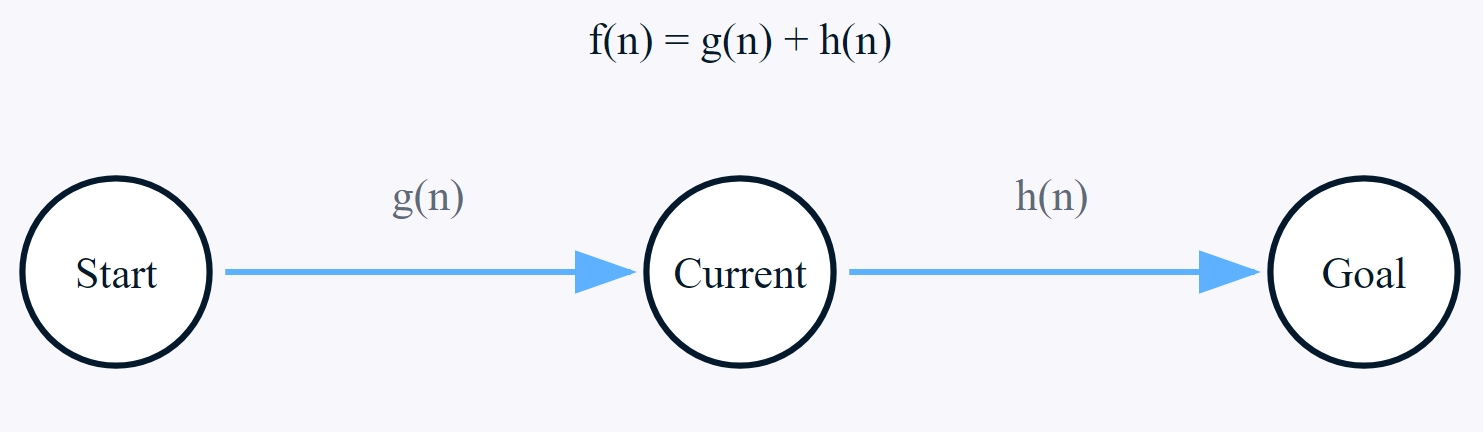
A eficiência do algoritmo A* vem de sua avaliação inteligente de caminhos usando três componentes principais: g(n), h(n) e f(n). Esses componentes trabalham juntos para orientar o processo de busca em direção aos caminhos mais promissores.
Função de custo do algoritmo A*
A função de custo do caminho g(n) representa a distância exata e conhecida do nó inicial até a posição atual em nossa pesquisa. Ao contrário dos valores estimados, esse custo é preciso e calculado pela soma de todos os pesos de borda individuais que foram percorridos ao longo do caminho escolhido.
Matematicamente, para um caminho através dos nós n0(nó inicial) até nk (nó atual), podemos expressar g(n) como:
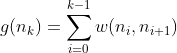
Onde:
À medida que avançamos no gráfico, esse valor se acumula, dando-nos uma medida clara dos recursos reais (seja distância, tempo ou qualquer outra métrica) que gastamos para chegar à nossa posição atual.
A função heurística h(n) fornece um custo estimado do nó atual até o nó de destino, atuando como o "palpite informado" do algoritmo sobre o caminho restante.
Matematicamente, para qualquer nó n, a estimativa heurística deve satisfazer a condição h(n)≤h*(n) onde h*(n) é o custo real para a meta, tornando-o admissível por nunca superestimar o custo real.
Em problemas baseados em grade ou em mapas, as funções heurísticas comuns incluem distância de Manhattan e a Distância euclidiana. Para as coordenadas (x1,y1) do nó atual e (x2,y2) do nó de destino, essas distâncias são calculadas como:
![]()
![]()
O custo total estimado f(n) é a pedra angular do processo de tomada de decisão do algoritmo A*, combinando o custo real do caminho e a estimativa heurística para avaliar o potencial de cada nó. Para qualquer nó n, esse custo é calculado como:
![]()
Onde:
O algoritmo algoritmo usa esse valor combinado para escolher estrategicamente o próximo nó a ser explorado, sempre selecionando o nó com o menor valor de f(n) da lista aberta, garantindo assim um equilíbrio ideal entre os custos conhecidos e as distâncias restantes estimadas.
O algoritmo A* mantém duas listas essenciais
Lista aberta:
Lista fechada:
O algoritmo seleciona continuamente o nó com o menor valor de f(n) da lista aberta, avalia-o e move-o para a lista fechada até atingir o nó de meta ou determinar que não há caminho.
Agora que entendemos os componentes fundamentais do A*, vamos ver como eles se combinam na prática. A implementação do algoritmo pode ser dividida em etapas claras e lógicas que transformam esses conceitos em uma solução funcional de localização de caminhos.
Veja a seguir como o algoritmo funciona, passo a passo:
function A_Star(start, goal):
// Initialize open and closed lists
openList = [start] // Nodes to be evaluated
closedList = [] // Nodes already evaluated
// Initialize node properties
start.g = 0 // Cost from start to start is 0
start.h = heuristic(start, goal) // Estimate to goal
start.f = start.g + start.h // Total estimated cost
start.parent = null // For path reconstruction
while openList is not empty:
// Get node with lowest f value - implement using a priority queue
// for faster retrieval of the best node
current = node in openList with lowest f value
// Check if we've reached the goal
if current = goal:
return reconstruct_path(current)
// Move current node from open to closed list
remove current from openList
add current to closedList
// Check all neighboring nodes
for each neighbor of current:
if neighbor in closedList:
continue // Skip already evaluated nodes
// Calculate tentative g score
tentative_g = current.g + distance(current, neighbor)
if neighbor not in openList:
add neighbor to openList
else if tentative_g >= neighbor.g:
continue // This path is not better
// This path is the best so far
neighbor.parent = current
neighbor.g = tentative_g
neighbor.h = heuristic(neighbor, goal)
neighbor.f = neighbor.g + neighbor.h
return failure // No path exists
function reconstruct_path(current):
path = []
while current is not null:
add current to beginning of path
current = current.parent
return pathVamos detalhar cada componente dessa implementação:
O algoritmo começa com a configuração de duas listas essenciais:
Cada nó armazena quatro informações essenciais:
O núcleo do A* é seu loop principal, que continua até que você tenha um dos dois:
Durante cada iteração, o algoritmo:
Para cada vizinho, o algoritmo:
Quando a meta é atingida, o algoritmo trabalha de trás para frente por meio das referências pai para construir o caminho ideal do início até a meta.
Essa abordagem sistemática garante que A* sempre encontrará o caminho ideal se:
Na próxima seção, traduziremos esse pseudocódigo em uma implementação prática em Python, completa com visualizações para ajudar você a entender como o algoritmo explora o espaço de busca.
Agora que entendemos a teoria e o pseudocódigo, vamos implementar o A* em Python. Criaremos uma implementação prática que você poderá usar como base para seus próprios projetos. Para tornar isso concreto, implementaremos o algoritmo em uma grade 2D - um cenário comum em jogos e aplicativos de robótica.
Primeiramente, importamos as bibliotecas necessárias e criamos uma estrutura de nós que armazenará informações de posição e localização para cada ponto em nosso espaço de pesquisa.
from typing import List, Tuple, Dict, Set
import numpy as np
import heapq
from math import sqrt
def create_node(position: Tuple[int, int], g: float = float('inf'),
h: float = 0.0, parent: Dict = None) -> Dict:
"""
Create a node for the A* algorithm.
Args:
position: (x, y) coordinates of the node
g: Cost from start to this node (default: infinity)
h: Estimated cost from this node to goal (default: 0)
parent: Parent node (default: None)
Returns:
Dictionary containing node information
"""
return {
'position': position,
'g': g,
'h': h,
'f': g + h,
'parent': parent
}Para dar suporte ao nosso algoritmo de pathfinding, criaremos várias funções auxiliares. Primeiro, implementaremos uma função para calcular as distâncias entre os pontos usando a distância euclidiana.
Em seguida, adicionaremos uma função para encontrar posições vizinhas válidas em nossa grade, verificando cuidadosamente os limites e os obstáculos. Por fim, criaremos uma função que nos ajudará a reconstruir o caminho depois de encontrarmos nosso objetivo.
def calculate_heuristic(pos1: Tuple[int, int], pos2: Tuple[int, int]) -> float:
"""
Calculate the estimated distance between two points using Euclidean distance.
"""
x1, y1 = pos1
x2, y2 = pos2
return sqrt((x2 - x1)**2 + (y2 - y1)**2)
def get_valid_neighbors(grid: np.ndarray, position: Tuple[int, int]) -> List[Tuple[int, int]]:
"""
Get all valid neighboring positions in the grid.
Args:
grid: 2D numpy array where 0 represents walkable cells and 1 represents obstacles
position: Current position (x, y)
Returns:
List of valid neighboring positions
"""
x, y = position
rows, cols = grid.shape
# All possible moves (including diagonals)
possible_moves = [
(x+1, y), (x-1, y), # Right, Left
(x, y+1), (x, y-1), # Up, Down
(x+1, y+1), (x-1, y-1), # Diagonal moves
(x+1, y-1), (x-1, y+1)
]
return [
(nx, ny) for nx, ny in possible_moves
if 0 <= nx < rows and 0 <= ny < cols # Within grid bounds
and grid[nx, ny] == 0 # Not an obstacle
]
def reconstruct_path(goal_node: Dict) -> List[Tuple[int, int]]:
"""
Reconstruct the path from goal to start by following parent pointers.
"""
path = []
current = goal_node
while current is not None:
path.append(current['position'])
current = current['parent']
return path[::-1] # Reverse to get path from start to goalAgora vamos implementar nosso algoritmo. Usaremos uma fila de prioridades para garantir que sempre exploremos os caminhos mais promissores primeiro.
Nosso algoritmo manterá dois conjuntos: um conjunto aberto para os nós que ainda precisamos explorar e um conjunto fechado para os nós que já verificamos.
À medida que explorarmos a grade, atualizaremos continuamente os custos do caminho sempre que encontrarmos rotas melhores até atingirmos nosso objetivo.
def find_path(grid: np.ndarray, start: Tuple[int, int],
goal: Tuple[int, int]) -> List[Tuple[int, int]]:
"""
Find the optimal path using A* algorithm.
Args:
grid: 2D numpy array (0 = free space, 1 = obstacle)
start: Starting position (x, y)
goal: Goal position (x, y)
Returns:
List of positions representing the optimal path
"""
# Initialize start node
start_node = create_node(
position=start,
g=0,
h=calculate_heuristic(start, goal)
)
# Initialize open and closed sets
open_list = [(start_node['f'], start)] # Priority queue
open_dict = {start: start_node} # For quick node lookup
closed_set = set() # Explored nodes
while open_list:
# Get node with lowest f value
_, current_pos = heapq.heappop(open_list)
current_node = open_dict[current_pos]
# Check if we've reached the goal
if current_pos == goal:
return reconstruct_path(current_node)
closed_set.add(current_pos)
# Explore neighbors
for neighbor_pos in get_valid_neighbors(grid, current_pos):
# Skip if already explored
if neighbor_pos in closed_set:
continue
# Calculate new path cost
tentative_g = current_node['g'] + calculate_heuristic(current_pos, neighbor_pos)
# Create or update neighbor
if neighbor_pos not in open_dict:
neighbor = create_node(
position=neighbor_pos,
g=tentative_g,
h=calculate_heuristic(neighbor_pos, goal),
parent=current_node
)
heapq.heappush(open_list, (neighbor['f'], neighbor_pos))
open_dict[neighbor_pos] = neighbor
elif tentative_g < open_dict[neighbor_pos]['g']:
# Found a better path to the neighbor
neighbor = open_dict[neighbor_pos]
neighbor['g'] = tentative_g
neighbor['f'] = tentative_g + neighbor['h']
neighbor['parent'] = current_node
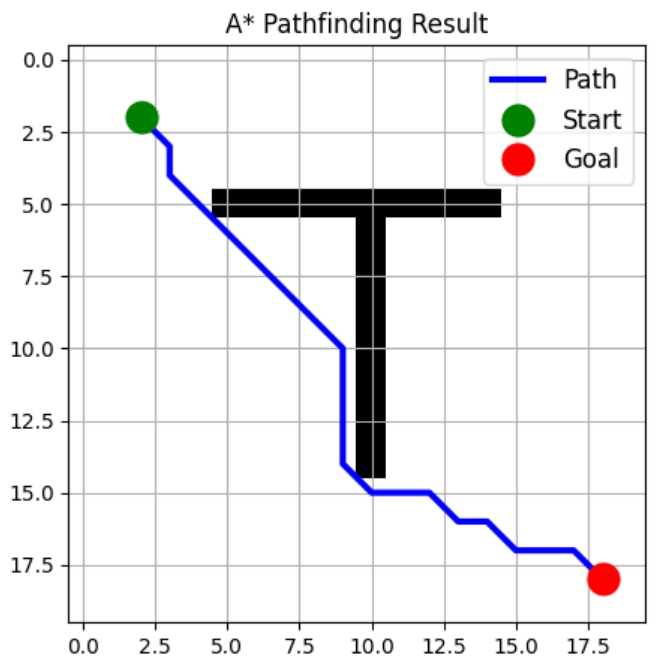
return [] # No path foundAgora, vamos criar uma função de visualização. Isso nos mostrará o layout da grade com todos os obstáculos, desenhará o caminho ideal calculado e marcará claramente as posições de início e meta.
import matplotlib.pyplot as plt
def visualize_path(grid: np.ndarray, path: List[Tuple[int, int]]):
"""
Visualize the grid and found path.
"""
plt.figure(figsize=(10, 10))
plt.imshow(grid, cmap='binary')
if path:
path = np.array(path)
plt.plot(path[:, 1], path[:, 0], 'b-', linewidth=3, label='Path')
plt.plot(path[0, 1], path[0, 0], 'go', markersize=15, label='Start')
plt.plot(path[-1, 1], path[-1, 0], 'ro', markersize=15, label='Goal')
plt.grid(True)
plt.legend(fontsize=12)
plt.title("A* Pathfinding Result")
plt.show()Veja como você pode usar a implementação:
# Create a sample grid
grid = np.zeros((20, 20)) # 20x20 grid, all free space initially
# Add some obstacles
grid[5:15, 10] = 1 # Vertical wall
grid[5, 5:15] = 1 # Horizontal wall
# Define start and goal positions
start_pos = (2, 2)
goal_pos = (18, 18)
# Find the path
path = find_path(grid, start_pos, goal_pos)
if path:
print(f"Path found with {len(path)} steps!")
visualize_path(grid, path)
else:
print("No path found!")Saída
Caminho encontrado com 22 passos!
Essa implementação é eficiente e extensível. Você pode modificá-lo facilmente para:
Na próxima seção, examinaremos algumas aplicações práticas desse algoritmo e veremos como ele é usado em cenários do mundo real.
A eficiência e a flexibilidade do algoritmo A* o tornam valioso em vários domínios. Aqui estão as principais áreas em que ele se destaca:
O algoritmo de busca A* é amplamente usado no desenvolvimento de videogames devido aos seus recursos ideais de localização de caminhos. Ele aprimora a experiência do jogador ao permitir movimentos mais realistas e responsivos dos personagens.
O A* é amplamente usado em sistemas de navegação para otimizar rotas, levando em conta vários fatores, como distância e possíveis obstáculos.
O algoritmo A* é fundamental para a robótica, onde o movimento eficiente é essencial para a produtividade e a segurança.
O A* também é aplicado na otimização de operações de rede, em que a eficiência na utilização de recursos e no roteamento é fundamental.
O que torna o A* particularmente valioso é sua capacidade de adaptação por meio de funções heurísticas personalizadas, permitindo a otimização de diferentes métricas, como distância, tempo ou uso de energia.
Na próxima seção, veremos alguns desafios comuns e técnicas de otimização para implementar o A* de forma eficaz.
Embora o A* seja poderoso, para implementá-lo de forma eficaz, você precisa enfrentar vários desafios comuns. O maior obstáculo que os desenvolvedores enfrentam é o gerenciamento eficiente dos recursos, principalmente quando lidam com grandes espaços de pesquisa.
Os principais desafios incluem:
Felizmente, existem várias estratégias de otimização eficazes para enfrentar esses desafios:
Quando o desempenho for fundamental, considere essas melhorias de velocidade:
Uma abordagem particularmente eficaz para espaços grandes é a pesquisa bilateral - pesquisar a partir do início e da meta simultaneamente. Além disso, ao trabalhar com pathfinding baseado em grade, você pode melhorar significativamente o desempenho pré-computando valores heurísticos ou usando tabelas de pesquisa.
Lembre-se de escolher as técnicas de otimização com base em seus requisitos e restrições específicos. O segredo é encontrar o equilíbrio certo entre o uso da memória e a velocidade de computação para o seu aplicativo.
O algoritmo A* é uma ferramenta fundamental em problemas de localização de caminhos e travessia de gráficos. Neste guia, vimos seus principais conceitos, implementamos uma solução prática em Python e examinamos suas diversas aplicações. A força do algoritmo está em seu equilíbrio entre precisão e eficiência, o que o torna inestimável em vários domínios, desde jogos até robótica.
Embora a implementação do A* tenha seus desafios, as técnicas de otimização que discutimos podem ajudar você a criar soluções eficientes. Se você estiver desenvolvendo jogos, planejando caminhos de robôs ou resolvendo problemas de roteamento, a compreensão do algoritmo A* oferece uma abordagem poderosa para encontrar caminhos ideais em seus aplicativos
Para criar algoritmos tão sofisticados, você precisa de uma base sólida de conceitos e práticas recomendadas de programação em Python. Você deseja fortalecer suas bases em Python e lidar com algoritmos mais avançados, como o A*?
Leve suas habilidades de programação para o próximo nível com nosso Curso Python Intermediário para Desenvolvedores no qual você dominará as funções personalizadas, explorará os módulos essenciais e criará aplicativos sofisticados.
Principais cursos da DataCamp
Programa
Curso
Curso
blog
DataCamp Team
11 min
Tutorial
Amberle McKee
Tutorial
Abid Ali Awan
Tutorial
Kurtis Pykes
Tutorial
Bex Tuychiev
Tutorial
Oluseye Jeremiah