programa
Fundamentos de la IA
10 h
Los algoritmos de recorrido de grafos son fundamentales para muchas aplicaciones informáticas, desde el desarrollo de juegos hasta la robótica. Estos algoritmos están diseñados para explorar y navegar por grafos, que son estructuras de datos compuestas por nodos (vértices) y aristas. Entre estos algoritmos, el algoritmo A* destaca como un enfoque especialmente eficaz y versátil para encontrar trayectorias óptimas.
El algoritmo A* es un algoritmo de búsqueda informada, lo que significa que aprovecha una función heurística para guiar su búsqueda hacia el objetivo. Esta función heurística estima el coste de alcanzar el objetivo desde un nodo determinado, lo que permite al algoritmo dar prioridad a los caminos prometedores y evitar explorar los innecesarios.
En este artículo, veremos los conceptos clave del algoritmo A*, su implementación en Python, sus aplicaciones y sus ventajas y limitaciones.
Para aprender más sobre la programación en Python, consulta nuestro Curso de Introducción a Python para Desarrolladores curso.
El algoritmo A* es un algoritmo potente y ampliamente utilizado para recorrer grafos y encontrar caminos. Encuentra el camino más corto entre un nodo inicial y un nodo objetivo en un grafo ponderado.

Algoritmo A
El algoritmo A* combina los mejores aspectos de otros dos algoritmos:
Imagina que intentas encontrar en un mapa la ruta más corta entre dos ciudades. Mientras que el algoritmo de Dijkstra exploraría en todas direcciones y la Búsqueda Mejor Primero podría dirigirse directamente hacia el destino (omitiendo potencialmente atajos), A* hace algo más inteligente. Considera ambas cosas:
Esta combinación ayuda a A* a tomar decisiones informadas sobre qué camino explorar a continuación, haciéndolo a la vez eficiente y preciso.
Para entender el algoritmo A*, tienes que estar familiarizado con estos conceptos fundamentales:
En la siguiente sección, profundizaremos en estos conceptos y veremos cómo los utiliza A* para encontrar rutas óptimas.
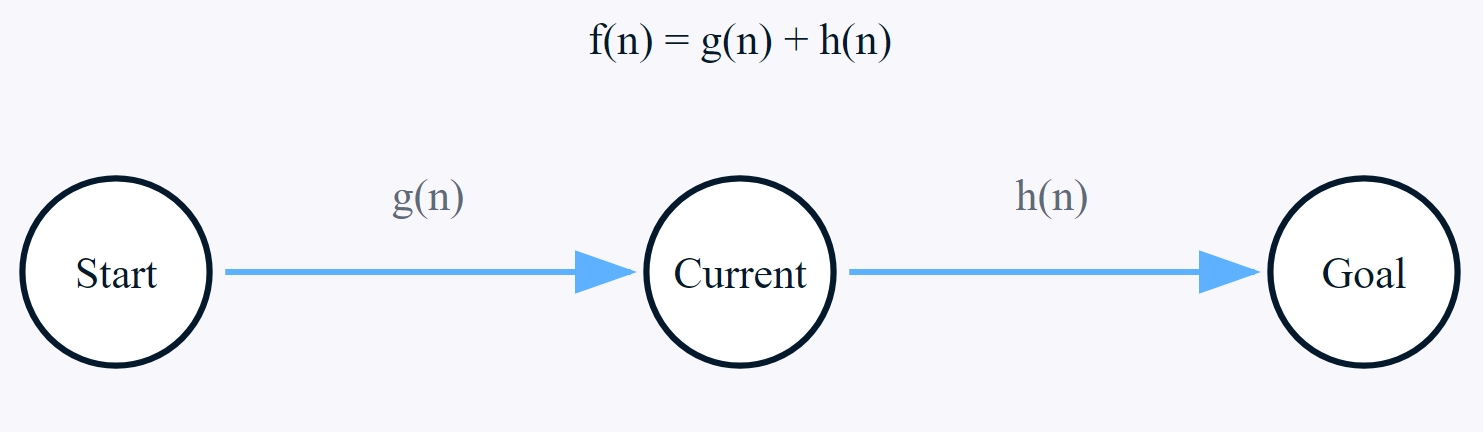
La eficacia del algoritmo A* procede de su evaluación inteligente de trayectorias mediante tres componentes clave: g(n), h(n) y f(n). Estos componentes trabajan juntos para guiar el proceso de búsqueda hacia los caminos más prometedores.
Algoritmo A* Función de coste
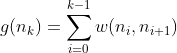
La función de coste del camino g(n) representa la distancia exacta y conocida desde el nodo inicial de partida hasta la posición actual en nuestra búsqueda. A diferencia de los valores estimados, este coste es preciso y se calcula sumando todos los pesos individuales de las aristas que se han recorrido a lo largo del camino elegido.
Matemáticamente, para una trayectoria a través de los nodos n0(nodo inicial) a nk (nodo actual), podemos expresar g(n) como
Dónde:
A medida que avanzamos por el gráfico, este valor se acumula, dándonos una medida clara de los recursos reales (ya sea distancia, tiempo o cualquier otra métrica) que hemos gastado para llegar a nuestra posición actual.
La función heurística h(n) proporciona un coste estimado desde el nodo actual hasta el nodo objetivo, actuando como "conjetura informada" del algoritmo sobre el camino restante.
Matemáticamente, para cualquier nodo n dado, la estimación heurística debe satisfacer la condición h(n)≤h*(n) donde h*(n) es el coste real del objetivo, lo que lo hace admisible al no sobrestimar nunca el coste real.
En los problemas basados en cuadrículas o en mapas, las funciones heurísticas comunes incluyen la distancia Manhattan y distancia euclidiana. Para las coordenadas (x1,y1) del nodo actual y (x2,y2) del nodo meta, estas distancias se calculan como
![]()
![]()
El coste total estimado f(n) es la piedra angular del proceso de toma de decisiones del algoritmo A*, que combina tanto el coste real de la ruta como la estimación heurística para evaluar el potencial de cada nodo. Para cualquier nodo n, este coste se calcula como
![]()
Dónde:
El algoritmo algoritmo utiliza este valor combinado para elegir estratégicamente qué nodo explorar a continuación, seleccionando siempre el nodo con la menor f(n) más bajo de la lista abierta, garantizando así un equilibrio óptimo entre los costes conocidos y las distancias restantes estimadas.
El algoritmo A* mantiene dos listas esenciales
Lista abierta:
Lista cerrada:
El algoritmo selecciona continuamente el nodo con el valor más bajo de f(n) más bajo de la lista abierta, lo evalúa y lo mueve a la lista cerrada hasta que llega al nodo meta o determina que no existe ningún camino.
Ahora que conocemos los componentes fundamentales de A*, veamos cómo se combinan en la práctica. La implementación del algoritmo puede descomponerse en pasos claros y lógicos que transforman estos conceptos en una solución de búsqueda de caminos que funciona.
He aquí cómo funciona el algoritmo, paso a paso:
function A_Star(start, goal):
// Initialize open and closed lists
openList = [start] // Nodes to be evaluated
closedList = [] // Nodes already evaluated
// Initialize node properties
start.g = 0 // Cost from start to start is 0
start.h = heuristic(start, goal) // Estimate to goal
start.f = start.g + start.h // Total estimated cost
start.parent = null // For path reconstruction
while openList is not empty:
// Get node with lowest f value - implement using a priority queue
// for faster retrieval of the best node
current = node in openList with lowest f value
// Check if we've reached the goal
if current = goal:
return reconstruct_path(current)
// Move current node from open to closed list
remove current from openList
add current to closedList
// Check all neighboring nodes
for each neighbor of current:
if neighbor in closedList:
continue // Skip already evaluated nodes
// Calculate tentative g score
tentative_g = current.g + distance(current, neighbor)
if neighbor not in openList:
add neighbor to openList
else if tentative_g >= neighbor.g:
continue // This path is not better
// This path is the best so far
neighbor.parent = current
neighbor.g = tentative_g
neighbor.h = heuristic(neighbor, goal)
neighbor.f = neighbor.g + neighbor.h
return failure // No path exists
function reconstruct_path(current):
path = []
while current is not null:
add current to beginning of path
current = current.parent
return pathVamos a desglosar cada componente de esta aplicación:
El algoritmo comienza estableciendo dos listas esenciales:
Cada nodo almacena cuatro informaciones críticas:
El núcleo de A* es su bucle principal, que continúa hasta que
Durante cada iteración, el algoritmo:
Para cada vecino, el algoritmo
Una vez alcanzado el objetivo, el algoritmo trabaja hacia atrás a través de las referencias padre para construir el camino óptimo desde el inicio hasta el objetivo.
Este enfoque sistemático garantiza que A* siempre encontrará el camino óptimo si:
En la siguiente sección, traduciremos este pseudocódigo en una implementación práctica en Python, completa con visualizaciones que te ayudarán a entender cómo explora el algoritmo el espacio de búsqueda.
Ahora que entendemos la teoría y el pseudocódigo, vamos a implementar A* en Python. Crearemos una aplicación práctica que podrás utilizar como base para tus propios proyectos. Para concretarlo, implementaremos el algoritmo en una cuadrícula 2D, un escenario habitual en juegos y aplicaciones robóticas.
Primero importamos las bibliotecas necesarias y creamos una estructura de nodos que almacenará información sobre la posición y la trayectoria de cada punto de nuestro espacio de búsqueda.
from typing import List, Tuple, Dict, Set
import numpy as np
import heapq
from math import sqrt
def create_node(position: Tuple[int, int], g: float = float('inf'),
h: float = 0.0, parent: Dict = None) -> Dict:
"""
Create a node for the A* algorithm.
Args:
position: (x, y) coordinates of the node
g: Cost from start to this node (default: infinity)
h: Estimated cost from this node to goal (default: 0)
parent: Parent node (default: None)
Returns:
Dictionary containing node information
"""
return {
'position': position,
'g': g,
'h': h,
'f': g + h,
'parent': parent
}Para apoyar nuestro algoritmo de búsqueda de trayectorias, crearemos varias funciones de ayuda. En primer lugar, implementaremos una función para calcular distancias entre puntos utilizando la distancia euclídea.
Después, añadiremos una función para encontrar posiciones vecinas válidas en nuestra cuadrícula, comprobando cuidadosamente los límites y los obstáculos. Por último, crearemos una función que nos ayude a reconstruir el camino una vez que hayamos encontrado nuestro objetivo.
def calculate_heuristic(pos1: Tuple[int, int], pos2: Tuple[int, int]) -> float:
"""
Calculate the estimated distance between two points using Euclidean distance.
"""
x1, y1 = pos1
x2, y2 = pos2
return sqrt((x2 - x1)**2 + (y2 - y1)**2)
def get_valid_neighbors(grid: np.ndarray, position: Tuple[int, int]) -> List[Tuple[int, int]]:
"""
Get all valid neighboring positions in the grid.
Args:
grid: 2D numpy array where 0 represents walkable cells and 1 represents obstacles
position: Current position (x, y)
Returns:
List of valid neighboring positions
"""
x, y = position
rows, cols = grid.shape
# All possible moves (including diagonals)
possible_moves = [
(x+1, y), (x-1, y), # Right, Left
(x, y+1), (x, y-1), # Up, Down
(x+1, y+1), (x-1, y-1), # Diagonal moves
(x+1, y-1), (x-1, y+1)
]
return [
(nx, ny) for nx, ny in possible_moves
if 0 <= nx < rows and 0 <= ny < cols # Within grid bounds
and grid[nx, ny] == 0 # Not an obstacle
]
def reconstruct_path(goal_node: Dict) -> List[Tuple[int, int]]:
"""
Reconstruct the path from goal to start by following parent pointers.
"""
path = []
current = goal_node
while current is not None:
path.append(current['position'])
current = current['parent']
return path[::-1] # Reverse to get path from start to goalAhora vamos a poner en práctica nuestro algoritmo. Utilizaremos una cola de prioridad para asegurarnos de que siempre exploramos primero los caminos más prometedores.
Nuestro algoritmo mantendrá dos conjuntos: un conjunto abierto para los nodos que aún tenemos que explorar y un conjunto cerrado para los nodos que ya hemos comprobado.
A medida que exploremos la malla, actualizaremos continuamente los costes de las rutas cada vez que encontremos rutas mejores, hasta que alcancemos nuestro objetivo.
def find_path(grid: np.ndarray, start: Tuple[int, int],
goal: Tuple[int, int]) -> List[Tuple[int, int]]:
"""
Find the optimal path using A* algorithm.
Args:
grid: 2D numpy array (0 = free space, 1 = obstacle)
start: Starting position (x, y)
goal: Goal position (x, y)
Returns:
List of positions representing the optimal path
"""
# Initialize start node
start_node = create_node(
position=start,
g=0,
h=calculate_heuristic(start, goal)
)
# Initialize open and closed sets
open_list = [(start_node['f'], start)] # Priority queue
open_dict = {start: start_node} # For quick node lookup
closed_set = set() # Explored nodes
while open_list:
# Get node with lowest f value
_, current_pos = heapq.heappop(open_list)
current_node = open_dict[current_pos]
# Check if we've reached the goal
if current_pos == goal:
return reconstruct_path(current_node)
closed_set.add(current_pos)
# Explore neighbors
for neighbor_pos in get_valid_neighbors(grid, current_pos):
# Skip if already explored
if neighbor_pos in closed_set:
continue
# Calculate new path cost
tentative_g = current_node['g'] + calculate_heuristic(current_pos, neighbor_pos)
# Create or update neighbor
if neighbor_pos not in open_dict:
neighbor = create_node(
position=neighbor_pos,
g=tentative_g,
h=calculate_heuristic(neighbor_pos, goal),
parent=current_node
)
heapq.heappush(open_list, (neighbor['f'], neighbor_pos))
open_dict[neighbor_pos] = neighbor
elif tentative_g < open_dict[neighbor_pos]['g']:
# Found a better path to the neighbor
neighbor = open_dict[neighbor_pos]
neighbor['g'] = tentative_g
neighbor['f'] = tentative_g + neighbor['h']
neighbor['parent'] = current_node
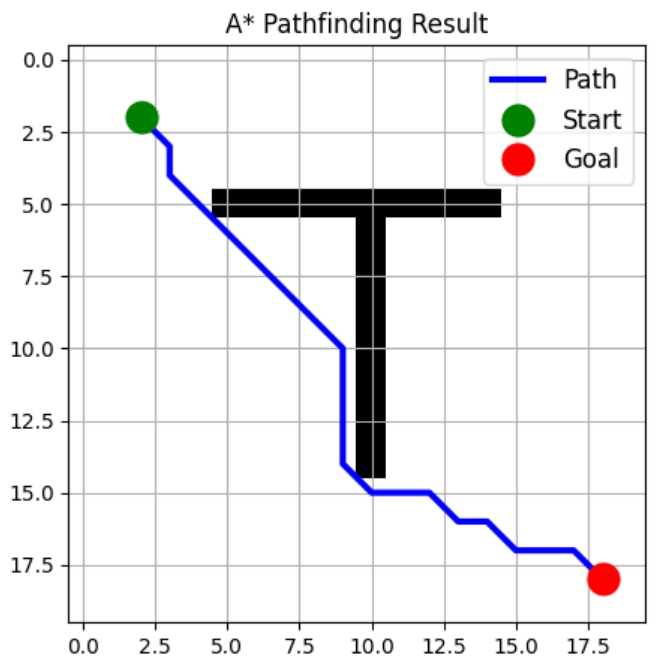
return [] # No path foundAhora, vamos a crear una función de visualización. Esto nos mostrará la disposición de nuestra cuadrícula con los obstáculos, dibujará nuestra trayectoria óptima calculada y marcará claramente nuestras posiciones de inicio y meta.
import matplotlib.pyplot as plt
def visualize_path(grid: np.ndarray, path: List[Tuple[int, int]]):
"""
Visualize the grid and found path.
"""
plt.figure(figsize=(10, 10))
plt.imshow(grid, cmap='binary')
if path:
path = np.array(path)
plt.plot(path[:, 1], path[:, 0], 'b-', linewidth=3, label='Path')
plt.plot(path[0, 1], path[0, 0], 'go', markersize=15, label='Start')
plt.plot(path[-1, 1], path[-1, 0], 'ro', markersize=15, label='Goal')
plt.grid(True)
plt.legend(fontsize=12)
plt.title("A* Pathfinding Result")
plt.show()A continuación te explicamos cómo utilizar la aplicación:
# Create a sample grid
grid = np.zeros((20, 20)) # 20x20 grid, all free space initially
# Add some obstacles
grid[5:15, 10] = 1 # Vertical wall
grid[5, 5:15] = 1 # Horizontal wall
# Define start and goal positions
start_pos = (2, 2)
goal_pos = (18, 18)
# Find the path
path = find_path(grid, start_pos, goal_pos)
if path:
print(f"Path found with {len(path)} steps!")
visualize_path(grid, path)
else:
print("No path found!")Salida
¡Camino encontrado con 22 pasos!
Esta aplicación es eficaz y ampliable. Puedes modificarlo fácilmente:
En la siguiente sección, veremos algunas aplicaciones prácticas de este algoritmo y veremos cómo se utiliza en situaciones reales.
La eficacia y flexibilidad del algoritmo A* lo hacen valioso en numerosos ámbitos. Éstas son las áreas clave en las que destaca:
El algoritmo de búsqueda A* se utiliza mucho en el desarrollo de videojuegos por su capacidad de búsqueda de trayectorias óptimas. Mejora la experiencia del jugador al permitir un movimiento del personaje más realista y sensible.
A* se utiliza mucho en los sistemas de navegación para optimizar las rutas, teniendo en cuenta diversos factores como la distancia y los posibles obstáculos.
El algoritmo A* es crucial para la robótica, donde el movimiento eficiente es esencial para la productividad y la seguridad.
A* también se aplica en la optimización de las operaciones de red, donde la eficiencia en la utilización de los recursos y el encaminamiento es primordial.
Lo que hace que A* sea especialmente valioso es su adaptabilidad mediante funciones heurísticas personalizadas, que permiten optimizar diferentes métricas como la distancia, el tiempo o el consumo de energía.
En la siguiente sección, veremos algunos retos comunes y técnicas de optimización para implantar A* con eficacia.
Aunque A* es potente, su aplicación efectiva requiere abordar varios retos comunes. El obstáculo más importante al que se enfrentan los desarrolladores es la gestión eficaz de los recursos, sobre todo cuando se trata de grandes espacios de búsqueda.
Los principales retos incluyen:
Afortunadamente, existen varias estrategias de optimización eficaces para afrontar estos retos:
Cuando el rendimiento es fundamental, ten en cuenta estas mejoras de velocidad:
Un enfoque especialmente eficaz para espacios grandes es la búsqueda bilateral: buscar desde el inicio y desde la meta simultáneamente. Además, cuando trabajes con la búsqueda de rutas basada en cuadrículas, puedes mejorar significativamente el rendimiento calculando previamente los valores heurísticos o utilizando tablas de consulta.
Recuerda que debes elegir las técnicas de optimización en función de tus requisitos y limitaciones específicos. La clave está en encontrar el equilibrio adecuado entre el uso de memoria y la velocidad de cálculo para tu aplicación.
El algoritmo A* es una herramienta fundamental en los problemas de búsqueda de caminos y recorrido de grafos. A través de esta guía, hemos visto sus conceptos básicos, implementado una solución práctica en Python y examinado sus diversas aplicaciones. La fuerza del algoritmo reside en su equilibrio entre precisión y eficacia, lo que lo hace inestimable en diversos ámbitos, desde los juegos a la robótica.
Aunque implantar A* conlleva sus retos, las técnicas de optimización que hemos comentado pueden ayudarte a crear soluciones eficientes. Si desarrollas juegos, planificas las trayectorias de un robot o resuelves problemas de enrutamiento, comprender el algoritmo A* te proporciona un potente enfoque para encontrar trayectorias óptimas en tus aplicaciones
Construir algoritmos tan sofisticados requiere una base sólida en conceptos y buenas prácticas de programación en Python. ¿Quieres reforzar tus fundamentos de Python y enfrentarte a algoritmos más avanzados como A*?
Lleva tus habilidades de programación al siguiente nivel con nuestro Curso Python Intermedio para Desarrolladores donde dominarás las funciones personalizadas, explorarás módulos esenciales y crearás aplicaciones sofisticadas.
Los mejores cursos de DataCamp
programa
Curso
Curso
blog
DataCamp Team
11 min
Tutorial
Amberle McKee
Tutorial
Bex Tuychiev
Tutorial
Abid Ali Awan
Tutorial
Derrick Mwiti
Tutorial
Zoumana Keita