Cursus
Principes fondamentaux de l'IA
10 h
Les algorithmes de traversée de graphes sont fondamentaux pour de nombreuses applications informatiques, du développement de jeux à la robotique. Ces algorithmes sont conçus pour explorer et naviguer dans les graphes, qui sont des structures de données composées de nœuds (sommets) et d'arêtes. Parmi ces algorithmes, l'algorithme A* se distingue par son efficacité et sa polyvalence dans la recherche de chemins optimaux.
L'algorithme A* est un algorithme de recherche informée, ce qui signifie qu'il utilise une fonction heuristique pour guider sa recherche vers l'objectif. Cette fonction heuristique estime le coût pour atteindre l'objectif à partir d'un nœud donné, ce qui permet à l'algorithme de donner la priorité aux chemins prometteurs et d'éviter d'explorer les chemins inutiles.
Dans cet article, nous verrons les concepts clés de l'algorithme A*, son implémentation en Python, ses applications, ainsi que ses avantages et ses limites.
Pour en savoir plus sur la programmation Python, consultez notre Cours d'introduction à Python pour les développeurs cours.
L'algorithme A* est un algorithme puissant et largement utilisé de traversée de graphe et de recherche de chemin. Il permet de trouver le chemin le plus court entre un nœud de départ et un nœud d'arrivée dans un graphe pondéré.

Algorithme A*
L'algorithme A* combine les meilleurs aspects de deux autres algorithmes :
Imaginez que vous essayez de trouver l'itinéraire le plus court entre deux villes sur une carte. Alors que l'algorithme de Dijkstra explore dans toutes les directions et que la recherche Best-First se dirige directement vers la destination (en manquant potentiellement des raccourcis), l'algorithme A* fait quelque chose de plus intelligent. Il prend en compte ces deux aspects :
Cette combinaison permet à A* de prendre des décisions éclairées sur la voie à suivre, ce qui la rend à la fois efficace et précise.
Pour comprendre l'algorithme A*, vous devez vous familiariser avec ces concepts fondamentaux :
Dans la section suivante, nous approfondirons ces concepts et verrons comment A* les utilise pour trouver des chemins optimaux.
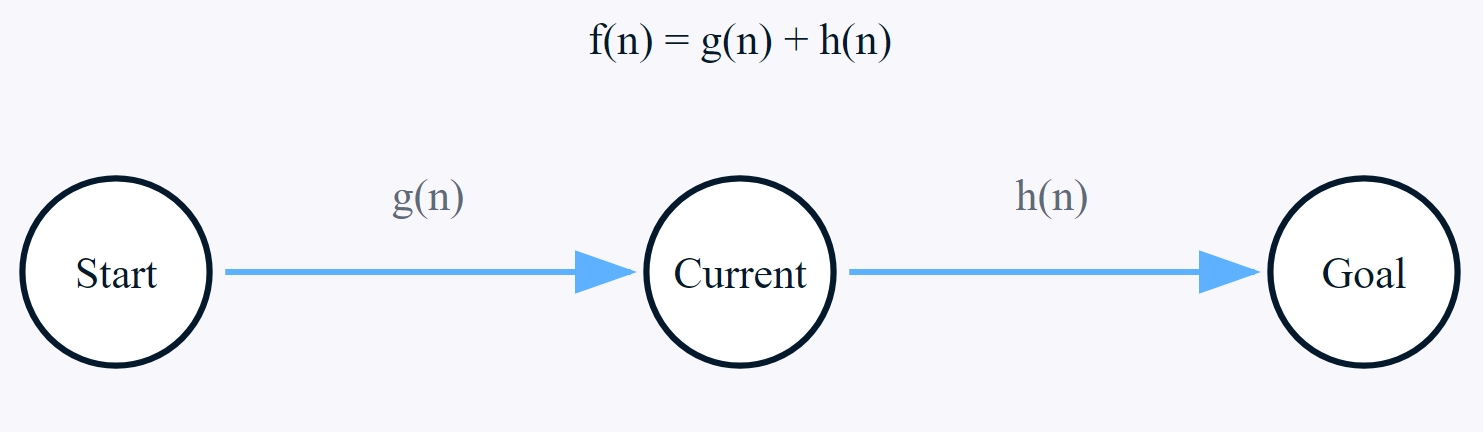
L'efficacité de l'algorithme A* provient de son évaluation intelligente des chemins à l'aide de trois composants clés : g(n), h(n) et f(n). Ces éléments se conjuguent pour orienter le processus de recherche vers les voies les plus prometteuses.
Algorithme A* Fonction de coût
La fonction de coût du chemin g(n) représente la distance exacte et connue entre le nœud de départ et la position actuelle dans notre recherche. Contrairement aux valeurs estimées, ce coût est précis et calculé en additionnant tous les poids des arêtes individuelles qui ont été parcourues le long du chemin choisi.
Mathématiquement, pour un chemin passant par les nœuds n0(nœud de départ) à nk (nœud actuel), nous pouvons exprimer g(n) comme suit :
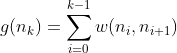
Où ?
Au fur et à mesure que nous nous déplaçons dans le graphique, cette valeur s'accumule, ce qui nous donne une mesure claire des ressources réelles (qu'il s'agisse de la distance, du temps ou de toute autre mesure) que nous avons dépensées pour atteindre notre position actuelle.
La fonction heuristique h(n) fournit une estimation du coût entre le nœud actuel et le nœud cible, agissant comme une "supposition éclairée" de l'algorithme sur le chemin restant à parcourir.
Mathématiquement, pour un nœud n donné, l'estimation heuristique doit satisfaire à la condition suivante h(n)≤h*(n) où h*(n) est le coût réel de l'objectif, ce qui le rend admissible en ne surestimant jamais le coût réel.
Dans les problèmes de type grille ou carte, les fonctions heuristiques courantes comprennent la distance de Manhattan et la distance euclidienne. Pour les coordonnées (x1,y1) du nœud actuel et (x2,y2) du nœud cible, ces distances sont calculées comme suit :
![]()
![]()
Le coût total estimé f(n) est la pierre angulaire du processus décisionnel de l'algorithme A*, qui combine à la fois le coût réel du chemin et l'estimation heuristique pour évaluer le potentiel de chaque nœud. Pour tout nœud n, ce coût est calculé comme suit :
![]()
Où ?
L'algorithme algorithme utilise cette valeur combinée pour choisir stratégiquement le nœud à explorer ensuite, en sélectionnant toujours le nœud ayant la plus faible valeur de f(n) la plus faible de la liste ouverte, assurant ainsi un équilibre optimal entre les coûts connus et les distances restantes estimées.
L'algorithme A* tient à jour deux listes essentielles
Liste ouverte :
Liste fermée :
L'algorithme sélectionne continuellement le nœud ayant la plus faible valeur de f(n) de la liste ouverte, l'évalue et le déplace vers la liste fermée jusqu'à ce qu'il atteigne le nœud cible ou détermine qu'aucun chemin n'existe.
Maintenant que nous avons compris les éléments fondamentaux de l'A*, voyons comment ils s'articulent en pratique. La mise en œuvre de l'algorithme peut être décomposée en étapes claires et logiques qui transforment ces concepts en une solution de recherche de chemin opérationnelle.
Voici comment fonctionne l'algorithme, étape par étape :
function A_Star(start, goal):
// Initialize open and closed lists
openList = [start] // Nodes to be evaluated
closedList = [] // Nodes already evaluated
// Initialize node properties
start.g = 0 // Cost from start to start is 0
start.h = heuristic(start, goal) // Estimate to goal
start.f = start.g + start.h // Total estimated cost
start.parent = null // For path reconstruction
while openList is not empty:
// Get node with lowest f value - implement using a priority queue
// for faster retrieval of the best node
current = node in openList with lowest f value
// Check if we've reached the goal
if current = goal:
return reconstruct_path(current)
// Move current node from open to closed list
remove current from openList
add current to closedList
// Check all neighboring nodes
for each neighbor of current:
if neighbor in closedList:
continue // Skip already evaluated nodes
// Calculate tentative g score
tentative_g = current.g + distance(current, neighbor)
if neighbor not in openList:
add neighbor to openList
else if tentative_g >= neighbor.g:
continue // This path is not better
// This path is the best so far
neighbor.parent = current
neighbor.g = tentative_g
neighbor.h = heuristic(neighbor, goal)
neighbor.f = neighbor.g + neighbor.h
return failure // No path exists
function reconstruct_path(current):
path = []
while current is not null:
add current to beginning of path
current = current.parent
return pathDécortiquons chaque élément de cette mise en œuvre :
L'algorithme commence par établir deux listes essentielles :
Chaque nœud stocke quatre éléments d'information essentiels :
Le cœur de l'A* est sa boucle principale, qui se poursuit jusqu'à ce que l'un ou l'autre des éléments suivants soit présent :
Au cours de chaque itération, l'algorithme :
Pour chaque voisin, l'algorithme :
Une fois l'objectif atteint, l'algorithme remonte les références parentales pour construire le chemin optimal entre le point de départ et l'objectif.
Cette approche systématique garantit que A* trouvera toujours le chemin optimal si :
Dans la section suivante, nous traduirons ce pseudocode en une implémentation pratique en Python, avec des visualisations pour vous aider à comprendre comment l'algorithme explore l'espace de recherche.
Maintenant que nous avons compris la théorie et le pseudocode, mettons en œuvre A* en Python. Nous créerons une mise en œuvre pratique que vous pourrez utiliser comme base pour vos propres projets. Pour rendre cela concret, nous mettrons en œuvre l'algorithme sur une grille 2D - un scénario courant dans les jeux et les applications robotiques.
Nous commençons par importer les bibliothèques nécessaires et par créer une structure de nœuds qui stockera les informations relatives à la position et au cheminement pour chaque point de notre espace de recherche.
from typing import List, Tuple, Dict, Set
import numpy as np
import heapq
from math import sqrt
def create_node(position: Tuple[int, int], g: float = float('inf'),
h: float = 0.0, parent: Dict = None) -> Dict:
"""
Create a node for the A* algorithm.
Args:
position: (x, y) coordinates of the node
g: Cost from start to this node (default: infinity)
h: Estimated cost from this node to goal (default: 0)
parent: Parent node (default: None)
Returns:
Dictionary containing node information
"""
return {
'position': position,
'g': g,
'h': h,
'f': g + h,
'parent': parent
}Pour soutenir notre algorithme de recherche de chemin, nous allons créer plusieurs fonctions d'aide. Tout d'abord, nous allons implémenter une fonction permettant de calculer les distances entre les points à l'aide de la distance euclidienne.
Ensuite, nous ajouterons une fonction pour trouver les positions voisines valides dans notre grille, en vérifiant soigneusement les limites et les obstacles. Enfin, nous créerons une fonction qui nous aidera à reconstruire le chemin une fois que nous aurons trouvé notre objectif.
def calculate_heuristic(pos1: Tuple[int, int], pos2: Tuple[int, int]) -> float:
"""
Calculate the estimated distance between two points using Euclidean distance.
"""
x1, y1 = pos1
x2, y2 = pos2
return sqrt((x2 - x1)**2 + (y2 - y1)**2)
def get_valid_neighbors(grid: np.ndarray, position: Tuple[int, int]) -> List[Tuple[int, int]]:
"""
Get all valid neighboring positions in the grid.
Args:
grid: 2D numpy array where 0 represents walkable cells and 1 represents obstacles
position: Current position (x, y)
Returns:
List of valid neighboring positions
"""
x, y = position
rows, cols = grid.shape
# All possible moves (including diagonals)
possible_moves = [
(x+1, y), (x-1, y), # Right, Left
(x, y+1), (x, y-1), # Up, Down
(x+1, y+1), (x-1, y-1), # Diagonal moves
(x+1, y-1), (x-1, y+1)
]
return [
(nx, ny) for nx, ny in possible_moves
if 0 <= nx < rows and 0 <= ny < cols # Within grid bounds
and grid[nx, ny] == 0 # Not an obstacle
]
def reconstruct_path(goal_node: Dict) -> List[Tuple[int, int]]:
"""
Reconstruct the path from goal to start by following parent pointers.
"""
path = []
current = goal_node
while current is not None:
path.append(current['position'])
current = current['parent']
return path[::-1] # Reverse to get path from start to goalMettons maintenant en œuvre notre algorithme. Nous utiliserons une file d'attente prioritaire pour nous assurer que nous explorons toujours les chemins les plus prometteurs en premier.
Notre algorithme maintient deux ensembles : un ensemble ouvert pour les nœuds que nous devons encore explorer et un ensemble fermé pour les nœuds que nous avons déjà vérifiés.
Au fur et à mesure que nous explorons la grille, nous mettons continuellement à jour les coûts des chemins lorsque nous trouvons de meilleurs itinéraires, jusqu'à ce que nous atteignions notre objectif.
def find_path(grid: np.ndarray, start: Tuple[int, int],
goal: Tuple[int, int]) -> List[Tuple[int, int]]:
"""
Find the optimal path using A* algorithm.
Args:
grid: 2D numpy array (0 = free space, 1 = obstacle)
start: Starting position (x, y)
goal: Goal position (x, y)
Returns:
List of positions representing the optimal path
"""
# Initialize start node
start_node = create_node(
position=start,
g=0,
h=calculate_heuristic(start, goal)
)
# Initialize open and closed sets
open_list = [(start_node['f'], start)] # Priority queue
open_dict = {start: start_node} # For quick node lookup
closed_set = set() # Explored nodes
while open_list:
# Get node with lowest f value
_, current_pos = heapq.heappop(open_list)
current_node = open_dict[current_pos]
# Check if we've reached the goal
if current_pos == goal:
return reconstruct_path(current_node)
closed_set.add(current_pos)
# Explore neighbors
for neighbor_pos in get_valid_neighbors(grid, current_pos):
# Skip if already explored
if neighbor_pos in closed_set:
continue
# Calculate new path cost
tentative_g = current_node['g'] + calculate_heuristic(current_pos, neighbor_pos)
# Create or update neighbor
if neighbor_pos not in open_dict:
neighbor = create_node(
position=neighbor_pos,
g=tentative_g,
h=calculate_heuristic(neighbor_pos, goal),
parent=current_node
)
heapq.heappush(open_list, (neighbor['f'], neighbor_pos))
open_dict[neighbor_pos] = neighbor
elif tentative_g < open_dict[neighbor_pos]['g']:
# Found a better path to the neighbor
neighbor = open_dict[neighbor_pos]
neighbor['g'] = tentative_g
neighbor['f'] = tentative_g + neighbor['h']
neighbor['parent'] = current_node
return [] # No path foundCréons maintenant une fonction de visualisation. Cela nous permettra de voir notre grille avec les obstacles éventuels, de dessiner notre trajectoire optimale calculée et de marquer clairement nos positions de départ et d'arrivée.
import matplotlib.pyplot as plt
def visualize_path(grid: np.ndarray, path: List[Tuple[int, int]]):
"""
Visualize the grid and found path.
"""
plt.figure(figsize=(10, 10))
plt.imshow(grid, cmap='binary')
if path:
path = np.array(path)
plt.plot(path[:, 1], path[:, 0], 'b-', linewidth=3, label='Path')
plt.plot(path[0, 1], path[0, 0], 'go', markersize=15, label='Start')
plt.plot(path[-1, 1], path[-1, 0], 'ro', markersize=15, label='Goal')
plt.grid(True)
plt.legend(fontsize=12)
plt.title("A* Pathfinding Result")
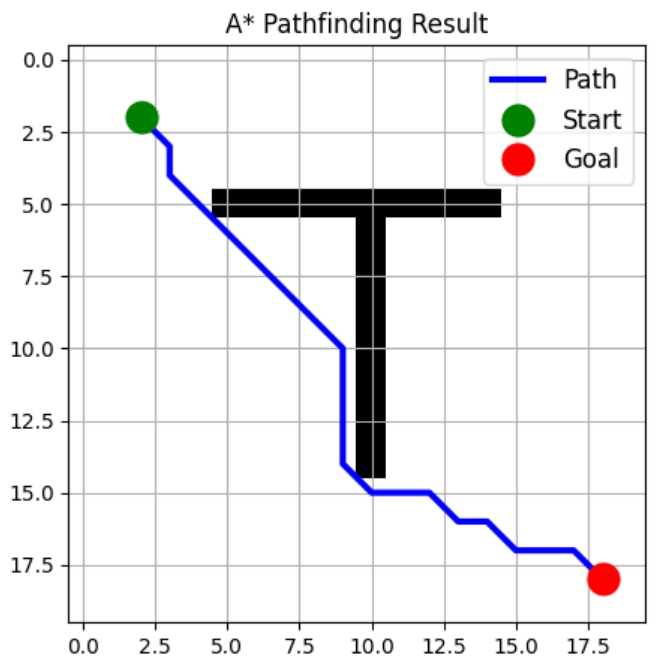
plt.show()Voici comment utiliser la mise en œuvre :
# Create a sample grid
grid = np.zeros((20, 20)) # 20x20 grid, all free space initially
# Add some obstacles
grid[5:15, 10] = 1 # Vertical wall
grid[5, 5:15] = 1 # Horizontal wall
# Define start and goal positions
start_pos = (2, 2)
goal_pos = (18, 18)
# Find the path
path = find_path(grid, start_pos, goal_pos)
if path:
print(f"Path found with {len(path)} steps!")
visualize_path(grid, path)
else:
print("No path found!")Sortie
Chemin trouvé avec 22 étapes !
Cette mise en œuvre est à la fois efficace et extensible. Vous pouvez facilement le modifier :
Dans la section suivante, nous examinerons quelques applications pratiques de cet algorithme et verrons comment il est utilisé dans des scénarios réels.
L'efficacité et la flexibilité de l'algorithme A* en font un outil précieux dans de nombreux domaines. Voici les principaux domaines dans lesquels il excelle :
L'algorithme de recherche A* est largement utilisé dans le développement de jeux vidéo en raison de ses capacités optimales de recherche de chemin. Il améliore l'expérience du joueur en permettant des mouvements de personnages plus réalistes et plus réactifs.
A* est largement utilisé dans les systèmes de navigation pour optimiser les itinéraires, en tenant compte de divers facteurs tels que la distance et les obstacles potentiels.
L'algorithme A* est crucial pour la robotique, où l'efficacité des mouvements est essentielle à la productivité et à la sécurité.
L'A* est également appliqué à l'optimisation des opérations de réseau, où l'efficacité de l'utilisation des ressources et du routage est primordiale.
Ce qui rend A* particulièrement précieux, c'est sa capacité d'adaptation grâce à des fonctions heuristiques personnalisées, qui permettent d'optimiser différents paramètres tels que la distance, le temps ou la consommation d'énergie.
Dans la section suivante, nous examinerons quelques défis courants et des techniques d'optimisation pour mettre en œuvre A* de manière efficace.
Si A* est un outil puissant, sa mise en œuvre efficace nécessite de relever plusieurs défis communs. L'obstacle le plus important auquel les développeurs sont confrontés est la gestion efficace des ressources, en particulier lorsqu'il s'agit de grands espaces de recherche.
Les principaux défis sont les suivants :
Heureusement, il existe plusieurs stratégies d'optimisation efficaces pour relever ces défis :
Lorsque les performances sont essentielles, pensez à ces améliorations de la vitesse :
Une approche particulièrement efficace pour les grands espaces est la recherche bilatérale, c'est-à-dire la recherche simultanée du point de départ et du point d'arrivée. En outre, lorsque vous travaillez avec un système de recherche de chemin basé sur une grille, vous pouvez améliorer considérablement les performances en calculant à l'avance des valeurs heuristiques ou en utilisant des tableaux de consultation.
N'oubliez pas de choisir les techniques d'optimisation en fonction de vos exigences et contraintes spécifiques. La clé est de trouver le bon équilibre entre l'utilisation de la mémoire et la vitesse de calcul pour votre application.
L'algorithme A* est un outil fondamental dans les problèmes de recherche de chemin et de traversée de graphe. À travers ce guide, nous avons vu ses concepts fondamentaux, mis en œuvre une solution pratique en Python et examiné ses diverses applications. La force de l'algorithme réside dans son équilibre entre précision et efficacité, ce qui le rend inestimable dans divers domaines, des jeux à la robotique.
Bien que la mise en œuvre de l'A* comporte des défis, les techniques d'optimisation que nous avons examinées peuvent vous aider à créer des solutions efficaces. Si vous développez des jeux, planifiez les trajectoires de robots ou résolvez des problèmes de routage, la compréhension de l'algorithme A* vous offre une approche puissante pour trouver des trajectoires optimales dans vos applications.
La construction d'algorithmes aussi sophistiqués nécessite des bases solides en matière de concepts de programmation Python et de bonnes pratiques. Vous souhaitez renforcer vos bases en Python et vous attaquer à des algorithmes plus avancés comme A* ?
Faites passer vos compétences en programmation au niveau supérieur grâce à notre cours Cours Python intermédiaire pour développeurs où vous maîtriserez les fonctions personnalisées, explorerez les modules essentiels et créerez des applications sophistiquées.
Les meilleurs cours de DataCamp
Cursus
Cours
Cours
Tutoriel
Derrick Mwiti
Tutoriel
Kurtis Pykes
Tutoriel
Mark Pedigo
Tutoriel
Abid Ali Awan
Tutoriel
DataCamp Team
Tutoriel