Programma
Nozioni di base sull'intelligenza artificiale
10 h
Gli algoritmi di attraversamento dei grafi sono fondamentali per molte applicazioni di informatica, dallo sviluppo di videogiochi alla robotica. Questi algoritmi sono progettati per esplorare e navigare all'interno di grafi, strutture dati composte da nodi (vertici) e archi. Tra questi, l'algoritmo A* spicca per efficienza e versatilità nella ricerca di percorsi ottimali.
L'algoritmo A* è una ricerca informata, cioè utilizza una funzione euristica per guidare la ricerca verso l'obiettivo. Questa funzione stima il costo per raggiungere l'obiettivo da un dato nodo, permettendo all'algoritmo di dare priorità ai percorsi promettenti ed evitare di esplorare quelli non necessari.
In questo articolo vedremo i concetti chiave dell'algoritmo A*, la sua implementazione in Python, le sue applicazioni, oltre a vantaggi e limiti.
Per saperne di più sulla programmazione in Python, dai un'occhiata al nostro corso Introduction to Python for Developers.
L'algoritmo A* è un potente e diffuso algoritmo di attraversamento dei grafi e ricerca del percorso. Trova il percorso più breve tra un nodo iniziale e un nodo obiettivo in un grafo pesato.

Algoritmo A*
L'algoritmo A* combina i migliori aspetti di altri due algoritmi:
Immagina di voler trovare il percorso più breve tra due città su una mappa. Mentre l'algoritmo di Dijkstra esplorerebbe in tutte le direzioni e il Best-First Search potrebbe dirigersi dritto alla meta (rischiando di perdere scorciatoie), A* fa qualcosa di più intelligente. Considera sia:
Questa combinazione aiuta A* a prendere decisioni informate su quale percorso esplorare dopo, risultando al tempo stesso efficiente e preciso.
Per capire l'algoritmo A*, è utile conoscere questi concetti fondamentali:
Nella prossima sezione approfondiremo questi concetti e vedremo come A* li usa per trovare percorsi ottimali.
L'efficienza di A* deriva dalla valutazione intelligente dei percorsi tramite tre componenti chiave: g(n), h(n) e f(n). Questi elementi lavorano insieme per guidare la ricerca verso i percorsi più promettenti.
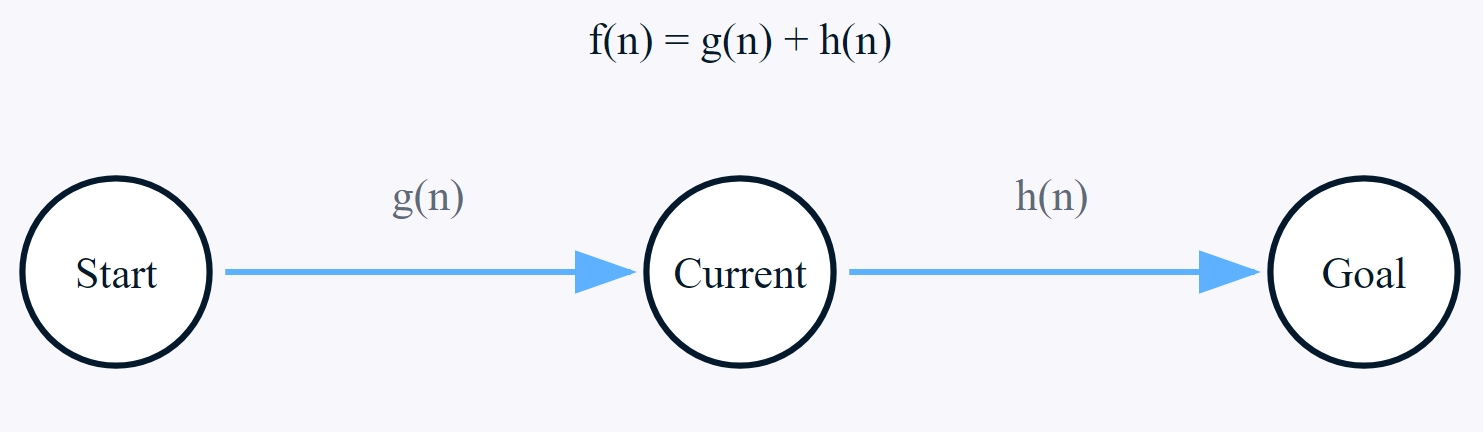
Funzione di costo dell'algoritmo A*
La funzione di costo g(n) rappresenta la distanza esatta e nota dal nodo iniziale alla posizione corrente nella ricerca. A differenza dei valori stimati, questo costo è preciso e si calcola sommando tutti i pesi degli archi attraversati lungo il percorso scelto.
Matematicamente, per un percorso attraverso i nodi n0 (nodo iniziale) fino a nk (nodo corrente), possiamo esprimere g(n) come:
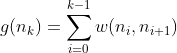
Dove:
Man mano che ci muoviamo nel grafo, questo valore si accumula, offrendoci una misura chiara delle risorse effettive (che siano distanza, tempo o altro) spese per raggiungere la posizione corrente.
La funzione euristica h(n) fornisce una stima del costo dal nodo corrente al nodo obiettivo, fungendo da "ipotesi informata" dell'algoritmo sul percorso rimanente.
Matematicamente, per un qualsiasi nodo n, la stima euristica deve soddisfare la condizione h(n)≤h*(n), dove h*(n) è il costo reale fino all'obiettivo: è ammissibile perché non sovrastima mai il costo vero.
Nei problemi a griglia o simili a mappe, funzioni euristiche comuni includono la distanza di Manhattan e la distanza euclidea. Per le coordinate (x1,y1) del nodo corrente e (x2,y2) del nodo obiettivo, queste distanze si calcolano come segue:
![]()
![]()
Il costo stimato totale f(n) è il fulcro del processo decisionale di A*, poiché combina sia il costo reale del percorso sia la stima euristica per valutare il potenziale di ogni nodo. Per qualsiasi nodo n, questo costo si calcola come:
![]()
Dove:
L'algoritmo usa questo valore combinato per scegliere in modo strategico quale nodo esplorare successivamente, selezionando sempre dalla lista aperta il nodo con il valore di f(n) più basso, garantendo così un equilibrio ottimale tra costi noti e distanze rimanenti stimate.
L'algoritmo A* mantiene due liste essenziali
Open list:
Closed list:
L'algoritmo seleziona continuamente il nodo con il valore f(n) più basso dalla open list, lo valuta e lo sposta nella closed list fino a raggiungere il nodo obiettivo o determinare che non esiste alcun percorso.
Ora che abbiamo compreso i componenti fondamentali di A*, vediamo come si combinano in pratica. L'implementazione dell'algoritmo può essere suddivisa in passaggi chiari e logici che trasformano questi concetti in una soluzione funzionante di pathfinding.
Ecco come funziona l'algoritmo, passo dopo passo:
function A_Star(start, goal):
// Initialize open and closed lists
openList = [start] // Nodes to be evaluated
closedList = [] // Nodes already evaluated
// Initialize node properties
start.g = 0 // Cost from start to start is 0
start.h = heuristic(start, goal) // Estimate to goal
start.f = start.g + start.h // Total estimated cost
start.parent = null // For path reconstruction
while openList is not empty:
// Get node with lowest f value - implement using a priority queue
// for faster retrieval of the best node
current = node in openList with lowest f value
// Check if we've reached the goal
if current = goal:
return reconstruct_path(current)
// Move current node from open to closed list
remove current from openList
add current to closedList
// Check all neighboring nodes
for each neighbor of current:
if neighbor in closedList:
continue // Skip already evaluated nodes
// Calculate tentative g score
tentative_g = current.g + distance(current, neighbor)
if neighbor not in openList:
add neighbor to openList
else if tentative_g >= neighbor.g:
continue // This path is not better
// This path is the best so far
neighbor.parent = current
neighbor.g = tentative_g
neighbor.h = heuristic(neighbor, goal)
neighbor.f = neighbor.g + neighbor.h
return failure // No path exists
function reconstruct_path(current):
path = []
while current is not null:
add current to beginning of path
current = current.parent
return pathAnalizziamo ogni componente di questa implementazione:
L'algoritmo inizia predisponendo due liste essenziali:
Ogni nodo memorizza quattro informazioni critiche:
Il cuore di A* è il suo ciclo principale, che prosegue finché:
A ogni iterazione, l'algoritmo:
Per ciascun vicino, l'algoritmo:
Una volta raggiunto l'obiettivo, l'algoritmo risale i riferimenti ai parent per costruire il percorso ottimale dalla partenza all'arrivo.
Questo approccio sistematico garantisce che A* trovi sempre il percorso ottimale se:
Nella prossima sezione tradurremo questo pseudocodice in una pratica implementazione in Python, con visualizzazioni che ti aiuteranno a capire come l'algoritmo esplora lo spazio di ricerca.
Ora che conosciamo teoria e pseudocodice, implementiamo A* in Python. Creeremo un'implementazione pratica che potrai usare come base per i tuoi progetti. Per rendere il tutto concreto, applicheremo l'algoritmo a una griglia 2D, uno scenario comune in giochi e robotica.
Per prima cosa importiamo le librerie necessarie e creiamo una struttura di nodo che memorizzerà posizione e informazioni di pathfinding per ciascun punto nello spazio di ricerca.
from typing import List, Tuple, Dict, Set
import numpy as np
import heapq
from math import sqrt
def create_node(position: Tuple[int, int], g: float = float('inf'),
h: float = 0.0, parent: Dict = None) -> Dict:
"""
Create a node for the A* algorithm.
Args:
position: (x, y) coordinates of the node
g: Cost from start to this node (default: infinity)
h: Estimated cost from this node to goal (default: 0)
parent: Parent node (default: None)
Returns:
Dictionary containing node information
"""
return {
'position': position,
'g': g,
'h': h,
'f': g + h,
'parent': parent
}Per supportare il nostro algoritmo di pathfinding, creeremo diverse funzioni di supporto. Innanzitutto, implementeremo una funzione per calcolare la distanza tra punti usando la distanza euclidea.
Poi aggiungeremo una funzione per trovare le posizioni vicine valide nella griglia, controllando accuratamente i limiti e gli ostacoli. Infine, creeremo una funzione che ci aiuta a ricostruire il percorso una volta raggiunto l'obiettivo.
def calculate_heuristic(pos1: Tuple[int, int], pos2: Tuple[int, int]) -> float:
"""
Calculate the estimated distance between two points using Euclidean distance.
"""
x1, y1 = pos1
x2, y2 = pos2
return sqrt((x2 - x1)**2 + (y2 - y1)**2)
def get_valid_neighbors(grid: np.ndarray, position: Tuple[int, int]) -> List[Tuple[int, int]]:
"""
Get all valid neighboring positions in the grid.
Args:
grid: 2D numpy array where 0 represents walkable cells and 1 represents obstacles
position: Current position (x, y)
Returns:
List of valid neighboring positions
"""
x, y = position
rows, cols = grid.shape
# All possible moves (including diagonals)
possible_moves = [
(x+1, y), (x-1, y), # Right, Left
(x, y+1), (x, y-1), # Up, Down
(x+1, y+1), (x-1, y-1), # Diagonal moves
(x+1, y-1), (x-1, y+1)
]
return [
(nx, ny) for nx, ny in possible_moves
if 0 <= nx < rows and 0 <= ny < cols # Within grid bounds
and grid[nx, ny] == 0 # Not an obstacle
]
def reconstruct_path(goal_node: Dict) -> List[Tuple[int, int]]:
"""
Reconstruct the path from goal to start by following parent pointers.
"""
path = []
current = goal_node
while current is not None:
path.append(current['position'])
current = current['parent']
return path[::-1] # Reverse to get path from start to goalOra implementiamo l'algoritmo. Useremo una coda con priorità per assicurarci di esplorare sempre prima i percorsi più promettenti.
Il nostro algoritmo manterrà due insiemi: un open set per i nodi ancora da esplorare e un closed set per i nodi già verificati.
Durante l'esplorazione della griglia, aggiorneremo continuamente i costi dei percorsi quando troviamo soluzioni migliori, fino a raggiungere l'obiettivo.
def find_path(grid: np.ndarray, start: Tuple[int, int],
goal: Tuple[int, int]) -> List[Tuple[int, int]]:
"""
Find the optimal path using A* algorithm.
Args:
grid: 2D numpy array (0 = free space, 1 = obstacle)
start: Starting position (x, y)
goal: Goal position (x, y)
Returns:
List of positions representing the optimal path
"""
# Initialize start node
start_node = create_node(
position=start,
g=0,
h=calculate_heuristic(start, goal)
)
# Initialize open and closed sets
open_list = [(start_node['f'], start)] # Priority queue
open_dict = {start: start_node} # For quick node lookup
closed_set = set() # Explored nodes
while open_list:
# Get node with lowest f value
_, current_pos = heapq.heappop(open_list)
current_node = open_dict[current_pos]
# Check if we've reached the goal
if current_pos == goal:
return reconstruct_path(current_node)
closed_set.add(current_pos)
# Explore neighbors
for neighbor_pos in get_valid_neighbors(grid, current_pos):
# Skip if already explored
if neighbor_pos in closed_set:
continue
# Calculate new path cost
tentative_g = current_node['g'] + calculate_heuristic(current_pos, neighbor_pos)
# Create or update neighbor
if neighbor_pos not in open_dict:
neighbor = create_node(
position=neighbor_pos,
g=tentative_g,
h=calculate_heuristic(neighbor_pos, goal),
parent=current_node
)
heapq.heappush(open_list, (neighbor['f'], neighbor_pos))
open_dict[neighbor_pos] = neighbor
elif tentative_g < open_dict[neighbor_pos]['g']:
# Found a better path to the neighbor
neighbor = open_dict[neighbor_pos]
neighbor['g'] = tentative_g
neighbor['f'] = tentative_g + neighbor['h']
neighbor['parent'] = current_node
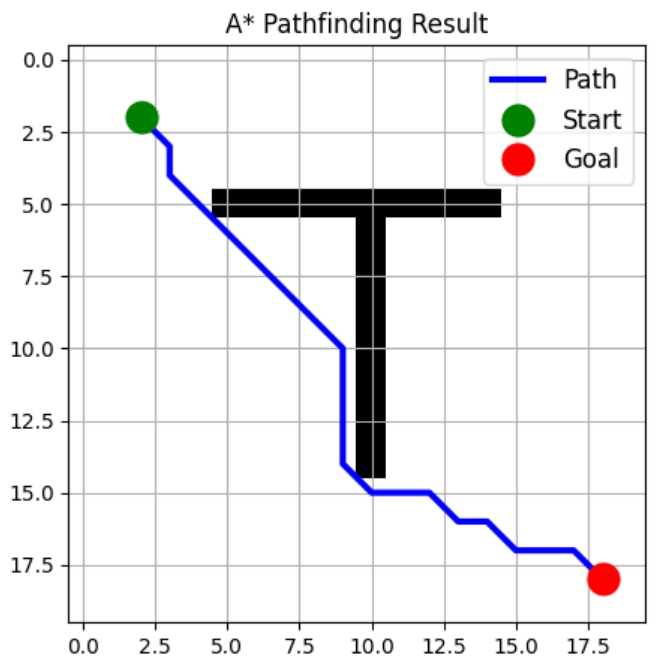
return [] # No path foundOra creiamo una funzione di visualizzazione. Mostrerà il layout della griglia con gli eventuali ostacoli, traccerà il percorso ottimale calcolato e segnerà chiaramente le posizioni di partenza e arrivo.
import matplotlib.pyplot as plt
def visualize_path(grid: np.ndarray, path: List[Tuple[int, int]]):
"""
Visualize the grid and found path.
"""
plt.figure(figsize=(10, 10))
plt.imshow(grid, cmap='binary')
if path:
path = np.array(path)
plt.plot(path[:, 1], path[:, 0], 'b-', linewidth=3, label='Path')
plt.plot(path[0, 1], path[0, 0], 'go', markersize=15, label='Start')
plt.plot(path[-1, 1], path[-1, 0], 'ro', markersize=15, label='Goal')
plt.grid(True)
plt.legend(fontsize=12)
plt.title("A* Pathfinding Result")
plt.show()Ecco come usare l'implementazione:
# Create a sample grid
grid = np.zeros((20, 20)) # 20x20 grid, all free space initially
# Add some obstacles
grid[5:15, 10] = 1 # Vertical wall
grid[5, 5:15] = 1 # Horizontal wall
# Define start and goal positions
start_pos = (2, 2)
goal_pos = (18, 18)
# Find the path
path = find_path(grid, start_pos, goal_pos)
if path:
print(f"Path found with {len(path)} steps!")
visualize_path(grid, path)
else:
print("No path found!")Output
Percorso trovato in 22 passi!
Questa implementazione è efficiente ed estensibile. Puoi modificarla facilmente per:
Nella prossima sezione vedremo alcune applicazioni pratiche di questo algoritmo e come viene usato in scenari reali.
L'efficienza e la flessibilità di A* lo rendono prezioso in numerosi ambiti. Ecco le aree principali in cui eccelle:
L'algoritmo A* è ampiamente usato nello sviluppo di videogiochi per le sue capacità di pathfinding ottimale. Migliora l'esperienza del giocatore consentendo movimenti dei personaggi più realistici e reattivi.
A* è ampiamente usato nei sistemi di navigazione per ottimizzare i percorsi, tenendo conto di vari fattori come distanza e possibili ostacoli.
L'algoritmo A* è cruciale in robotica, dove l'efficienza del movimento è essenziale per produttività e sicurezza.
A* è applicato anche all'ottimizzazione delle operazioni di rete, dove efficienza nel routing e uso delle risorse sono fondamentali.
Il valore di A* sta soprattutto nella sua adattabilità tramite funzioni euristiche personalizzate, che consentono di ottimizzare per metriche diverse come distanza, tempo o consumo energetico.
Nella prossima sezione vedremo sfide comuni e tecniche di ottimizzazione per implementare A* in modo efficace.
Pur essendo potente, per implementare A* in modo efficace bisogna affrontare alcune sfide comuni. L'ostacolo principale è la gestione efficiente delle risorse, soprattutto con spazi di ricerca molto grandi.
Le principali difficoltà includono:
Fortunatamente, esistono diverse strategie efficaci per affrontare queste sfide:
Quando le prestazioni sono critiche, considera questi miglioramenti:
Un approccio particolarmente efficace per spazi estesi è la ricerca bilaterale, cioè la ricerca simultanea dalla partenza e dall'obiettivo. Inoltre, nel pathfinding su griglia puoi migliorare sensibilmente le prestazioni precomputando i valori dell'euristica o usando tabelle di lookup.
Ricorda di scegliere le tecniche di ottimizzazione in base ai requisiti e ai vincoli specifici. La chiave è trovare il giusto equilibrio tra uso di memoria e velocità di calcolo per la tua applicazione.
L'algoritmo A* è uno strumento fondamentale per problemi di pathfinding e attraversamento dei grafi. In questa guida abbiamo visto i suoi concetti di base, implementato una soluzione pratica in Python ed esaminato le sue diverse applicazioni. La sua forza risiede nell'equilibrio tra accuratezza ed efficienza, che lo rende prezioso in ambiti che vanno dal gaming alla robotica.
Sebbene l'implementazione di A* presenti delle sfide, le tecniche di ottimizzazione discusse possono aiutarti a creare soluzioni efficienti. Se stai sviluppando giochi, pianificando percorsi per robot o risolvendo problemi di instradamento, comprendere l'algoritmo A* ti fornisce un potente approccio per trovare percorsi ottimali nelle tue applicazioni
Costruire algoritmi così sofisticati richiede solide basi nei concetti di programmazione Python e nelle best practice. Vuoi rafforzare le tue fondamenta in Python e affrontare algoritmi avanzati come A*?
Fai un salto di qualità con il nostro corso Intermediate Python for Developers, dove imparerai a creare funzioni personalizzate, esplorare moduli essenziali e costruire applicazioni sofisticate.
I migliori corsi DataCamp
Programma
Corso
Corso
blog
Abid Ali Awan
15 min
blog
Abid Ali Awan
10 min
blog
Tim Lu
12 min

