
Cursus
Lineaire algebra voor data science in R
4 Hr
21.2K
De Laplace-operator duikt op in graafgebaseerde algoritmen, beeldverwerkingspipelines en spectrale clustering. Dus als je modellen bouwt die werken met grafen, afbeeldingen of hoog-dimensionale data, is de Laplace-operator geen optionele achtergrondwiskunde. Het is precies datgene wat achter de schermen het werk doet.
In dit artikel neem ik de Laplace-operator van de basis af door: de wiskunde erachter, de geometrische intuïtie, de graaf-Laplaciaan en zijn matrixvorm, en hoe hij wordt gebruikt in echte machinelearningtoepassingen.
Heb je een praktische introductie tot differentiaalvergelijkingen nodig? Lees ons recente artikel om van de basis naar praktische machinelearningtoepassingen te gaan.
De Laplace-operator is een differentiaaloperator van de tweede orde. Hij vertelt je hoe een functie kromt op een bepaald punt.
Je ziet hem soms beschreven als de divergentie van de gradiënt.
En dat is de sleutel om te begrijpen wat de operator daadwerkelijk doet:
Samen vertelt de Laplace-operator je of een punt een lokaal maximum, een lokaal minimum of ergens daartussenin (vlak) is.
In gewone taal: de Laplace-operator meet hoeveel de waarde van een functie op een punt verschilt van de gemiddelde waarde van zijn buren. Als de Laplace-operator nul is, is de functie lokaal "in balans". Positief betekent dat het punt lager ligt dan zijn omgeving. Negatief betekent dat het erboven ligt.
In 2D, voor een functie f(x, y):
2D-formule van de Laplace-operator
In 3D, voor een functie f(x, y, z):
3D-formule van de Laplace-operator
Het patroon geldt in elk aantal dimensies: je somt de tweede partiële afgeleiden langs elke as. Dit maakt de Laplace-operator zeer geschikt voor hoog-dimensionale data, precies daarom zie je hem zo vaak in machine learning.
De formule van de Laplace-operator is korter dan je zou verwachten voor iets dat zo vaak voorkomt in machine learning.
In 3D, voor een functie f(x, y, z), ziet het er zo uit:
3D-formule van de Laplace-operator
Dat is alles. Je somt de tweede partiële afgeleiden langs elke dimensie op.
Elke term stelt langs zijn as dezelfde vraag: buigt de functie omhoog, omlaag of is die vlak? Door die antwoorden op te tellen, krijg je één getal dat de totale kromming op dat punt beschrijft.
De formule generaliseert naar n dimensies. Dit is de algemene formule voor een functie met n invoerdimensies:

Generalisatie van de Laplace-formule
Hierdoor werkt de Laplace-operator goed in machine learning, waar je data vaak in honderden of duizenden dimensies leeft. De operator somt gewoon de kromming langs elke dimensie op.
Als je met gradient descent hebt gewerkt, denk je al na over eerste afgeleiden — welke kant is omlaag? De Laplace-operator gaat een stap verder.
Tweede afgeleiden vertellen je iets over de vorm van die heuvel.
Een grote positieve Laplace-waarde op een punt betekent dat de functie in alle richtingen sterk omhoog kromt — je zit dicht bij een minimum. Een grote negatieve waarde betekent dat je dicht bij een maximum bent. Dicht bij nul betekent dat het oppervlak lokaal vlak is.
Die krommingsinformatie is belangrijk in optimalisatiemethoden van de tweede orde, die ze gebruiken om slimmer stappen te zetten dan pure gradient descent. De Laplace-operator is een manier om die kromming samen te vatten in één scalaire waarde.
Het teken van de Laplace-operator op een punt vertelt je de vorm van de functie eromheen.
Als ∇²f > 0 op een punt, kromt de functie in alle richtingen omhoog. Het punt ligt lager dan zijn omgeving. Dat is convexiteit.
Als ∇²f < 0, kromt de functie omlaag. Het punt ligt hoger dan zijn omgeving. Dat is concaviteit.
Als ∇²f = 0, is de functie lokaal vlak. Geen netto kromming in welke richting dan ook.
Dit is de meervoudige versie van de tweede-afgeleidentoets die je al kent. In 1D betekent een positieve tweede afgeleide een lokaal minimum en een negatieve een lokaal maximum. De Laplace-operator breidt datzelfde idee uit naar elk aantal dimensies door de kromming over alle assen te sommeren.
De Hessiaan vangt het volledige krommingsbeeld. Het is een matrix van alle tweede partiële afgeleiden, en elk element beschrijft hoe de functie kromt langs een paar assen.
De Laplace-operator is het spoor (trace) van de Hessiaan — de som van zijn diagonaalelementen. Waar de Hessiaan je de complete krommingsuitsplitsing geeft, vouwt de Laplace-operator die samen tot één getal.
Die afruil is belangrijk in machine learning. De volledige Hessiaan is duur om te berekenen voor hoog-dimensionale modellen — een model met n parameters heeft een n × n Hessiaan. De Laplace-operator geeft je een goedkope, scalaire samenvatting van de kromming die snel is om mee te werken.
Tijdens het trainen van een model navigeer je over een verliesoppervlak. Vlakke regio's betekenen langzaam leren. Convexe gebieden betekenen dat de optimizer kan doorschieten. De Laplace-operator geeft je snel inzicht in welke situatie je zit.
Graafgebaseerde methoden gebruiken de Laplace-operator om te meten hoe soepel waarden veranderen over de knopen van een graaf. Het is een directe uitbreiding van dezelfde krommingsintuïtie van continue functies naar discrete structuren.
Gradient descent gebruikt alleen eerste afgeleiden.
De gradiënt vertelt je in welke richting je moet stappen. Hij vertelt je niet hoe groot die stap moet zijn. Een steile gradiënt in een vlakke, brede vallei vraagt om een grote stap. Diezelfde steile gradiënt nabij een scherpe klifrand vraagt om een kleine. Eerste afgeleiden alleen kunnen dat verschil niet vertellen.
Daar komen tweede afgeleiden om de hoek kijken.
Kromming beschrijft hoe snel de gradiënt zelf verandert. Hoge kromming betekent dat het verliesoppervlak scherp buigt — kleine stappen in parameter-ruimte veroorzaken grote veranderingen in de gradiënt. Lage kromming betekent dat het oppervlak vlak is en de gradiënt langzaam verandert.
Als je kromming negeert en een vaste leersnelheid gebruikt, gok je. Te groot, en je schiet door in gebieden met hoge kromming. Te klein, en je kruipt door vlakke gebieden.
Optimalisatiemethoden van de tweede orde zoals de methode van Newton gebruiken kromming om stapgroottes automatisch in te stellen. Ze delen de gradiënt door de kromming, nemen grotere stappen waar het oppervlak vlak is en kleinere waar het scherp is.
De Laplace-operator is het spoor van de Hessiaan — een enkel scalair dat de totale kromming op een punt samenvat. Hij vangt niet het volledige beeld zoals de Hessiaan dat doet, maar is goedkoop te berekenen en bruikbaar als signaal.
Hier is in gewone taal wat je moet onthouden:
Kromming hangt ook samen met trainstabiliteit. Scherpe minima — gebieden met hoge kromming — generaliseren doorgaans slechter dan vlakke. Een model dat convergeert naar een scherp minimum is gevoelig voor kleine veranderingen in input.
Sommige regularisatietechnieken straffen kromming direct om optimalisatie naar vlakkere regio's van het verliesoppervlak te sturen. De Laplace-operator verschijnt hier ook, als manier om te meten en te begrenzen hoe scherp de voorspellingen van het model veranderen over de invoerruimte.
Kromming begrijpen helpt je te snappen waarom je optimizer stokt, waarom je leersnelheid zo belangrijk is en waarom sommige minima beter generaliseren dan andere.
Tot nu toe leefde de Laplace-operator in de wereld van continue functies. Maar wat gebeurt er als je data geen glad oppervlak is, maar juist een graaf?
Daar komt de graaf-Laplaciaan om de hoek kijken. Die neemt hetzelfde kernidee — meten hoe een waarde op één punt verschilt van die van zijn buren — en past het toe op knopen en randen.
De graaf-Laplaciaan L is gedefinieerd als:

Formule van de graaf-Laplaciaan (vereenvoudigd)
Twee matrices. Dat is alles. Laten we bekijken wat elk van hen betekent.
De adjacentiematrix A codeert welke knopen verbonden zijn. Voor een graaf met n knopen is A een n × n matrix waarbij A_ij = 1 als er een rand is tussen knoop i en knoop j, en 0 anders.
Voor een eenvoudige ongerichte graaf met 3 knopen waarbij knoop 1 is verbonden met knoop 2 en 3, maar 2 en 3 niet met elkaar verbonden zijn:

De adjacentiematrix
De graadmatrix D is een diagonaalmatrix. Elk diagonaalelement D_ii is de graad van knoop i — het aantal randen dat ermee verbonden is. Alle niet-diagonale elementen zijn nul.
Dit is de formule voor dezelfde graaf:

De graadmatrix
Knoop 1 heeft graad 2 (verbonden met twee knopen). Knopen 2 en 3 hebben elk graad 1.
Trek A af van D en je krijgt L:

Adjacentiematrix aftrekken van de graadmatrix
Elk diagonaalelement vertelt je hoeveel verbindingen een knoop heeft. Elk niet-diagonaal element L_ij is -1 als de knopen i en j verbonden zijn, en 0 als dat niet zo is.
Als je L vermenigvuldigt met een vector van waarden die aan elke knoop zijn toegewezen, meet het resultaat hoeveel de waarde van elke knoop verschilt van de waarden van zijn buren. Dat is de discrete versie van dezelfde krommingsintuïtie van eerder — maar nu toegepast op een graaf in plaats van een continu oppervlak.
De echte kracht van L komt van zijn eigenwaarden en eigenvectoren:
De kleinste eigenwaarde van L is altijd 0. De bijbehorende eigenvector is een constante vector — elke knoop krijgt dezelfde waarde. Dat is logisch: een constante functie heeft nul "variatie" over de graaf.
Het aantal nul-eigenwaarden is gelijk aan het aantal verbonden componenten in de graaf. Als je graaf drie niet-verbonden clusters heeft, heeft L drie nul-eigenwaarden. Dit is een directe manier om graafconnectiviteit uit een matrix af te lezen.
Kleine niet-nul eigenwaarden komen overeen met eigenvectoren die langzaam veranderen over de graaf — nabije knopen krijgen vergelijkbare waarden. Grote eigenwaarden komen overeen met eigenvectoren die snel oscilleren tussen verbonden knopen.
Leuk weetje: dit spectrum aan eigenwaarden geeft spectrale methoden hun naam.
Spectrale clustering gebruikt de eigenvectoren van L om clusters te vinden in graafgestructureerde data. Het idee is dat eigenvectoren die horen bij kleine eigenwaarden vergelijkbare waarden toekennen aan dicht verbonden knopen en verschillende waarden aan zwak verbonden knopen.
Om k clusters te vinden, neem je de k eigenvectoren die horen bij de k kleinste niet-nul eigenwaarden van L, stapel ze tot een matrix en voer k-means uit op de rijen. Elke rij is een knoop, en zijn positie in deze laag-dimensionale ruimte weerspiegelt zijn graafbuurt.
Dit werkt voor community detectie in sociale netwerken, documentclustering, afbeeldingssegmentatie en overal waar je data een natuurlijke graafstructuur heeft. Twee knopen die sterk verbonden zijn, komen dicht bij elkaar terecht in de eigenvectorruimte. Twee knopen uit verschillende communities komen ver van elkaar terecht.
De graaf-Laplaciaan verandert een lastig combinatorisch probleem — vind de clusters in deze graaf — in een lineairalgebraprobleem dat eenvoudig op te lossen is.
Spectrale clustering is waar de graaf-Laplaciaan van interessante wiskunde een praktisch ML-instrument wordt.
Het kernidee is dat je in plaats van ruwe datapunten direct te clusteren, je ze clustert in een ruimte die gedefinieerd is door de eigenvectoren van L. Die ruimte vangt graafstructuur, zodat je ziet welke knopen sterk verbonden zijn, welke zwak, en welke bij gescheiden communities horen.
Neem de k eigenvectoren die horen bij de k kleinste niet-nul eigenwaarden van L. Stapel ze als kolommen in een matrix. Elke rij van die matrix is een knoop, nu weergegeven als een punt in een k-dimensionale ruimte.
Eigenvectoren die horen bij kleine eigenwaarden veranderen langzaam over de graaf. Knopen die dicht verbonden zijn, krijgen vergelijkbare waarden in deze eigenvectoren — en vergelijkbare waarden betekenen vergelijkbare rijen — en vergelijkbare rijen betekenen dat ze dicht bij elkaar terechtkomen in de nieuwe ruimte.
Er zijn in de praktijk twee versies van de graaf-Laplaciaan.
De ongenormaliseerde Laplacian is de rechttoe rechtaan L = D - A. Die werkt goed wanneer knopen ongeveer vergelijkbare graden hebben — dus wanneer de meeste knopen een vergelijkbaar aantal verbindingen hebben
De genormaliseerde Laplacian corrigeert voor graad-ongelijkheid. Er zijn een paar varianten, maar de meest voorkomende is:

Formule van de genormaliseerde Laplacian
Dit herschaalt de bijdrage van elke knoop met zijn graad. In echte grafen — sociale netwerken, webgrafen, citatienetwerken — hebben sommige knopen honderden verbindingen en anderen slechts één of twee. Zonder normalisatie domineren knopen met hoge graad de eigenvectoren en lijdt de clustering hieronder.
Gebruik standaard de genormaliseerde Laplacian, tenzij je weet dat je graaf een uniforme graadverdeling heeft.
Spectrale clustering met de graaf-Laplaciaan komt voor in een breed scala aan machinelearningtaken. Enkele voorbeelden:
Telkens wanneer je data een natuurlijke graafstructuur heeft, of je er een kunt bouwen uit paarsgewijze gelijkenissen, geeft spectrale clustering je een onderbouwde manier om groepen te vinden die zuiver afstandsgebaseerde methoden missen.
De Laplace-operator is een van de oudste tools in computervisie en wordt nog steeds actief gebruikt.
In beeldverwerking is pixelintensiteit de functie. De Laplace-operator meet hoe de intensiteit van een pixel verschilt van die van zijn buren. Waar intensiteit langzaam verandert, is de Laplace-operator nabij nul. Waar die sterk verandert — aan een rand — geeft de Laplace-operator een sterke respons.
Dat is de hele basis van Laplace-randdetectie.
Een eerste afgeleide vindt waar intensiteit verandert. Een tweede afgeleide vindt waar die verandering zelf verandert — met andere woorden, waar de veranderingssnelheid piekt en daarna afneemt.
Aan een rand loopt de intensiteit op en vlakt daarna af. De eerste afgeleide piekt op die helling. De tweede afgeleide — de Laplace-operator — gaat precies op de top van die piek door nul. Deze nuldoorgangen markeren de exacte locatie van een rand, wat de Laplace-operator nauwkeuriger maakt voor randlokalisatie dan methoden op basis van eerste afgeleiden zoals het Sobel-filter.
In de praktijk zijn afbeeldingen rasters van pixels, geen continue functies. De continue Laplace-operator wordt benaderd met een convolutiekernel — een kleine matrix die je over de afbeelding schuift.
De standaard 3×3 discrete Laplace-kernel ziet er zo uit:
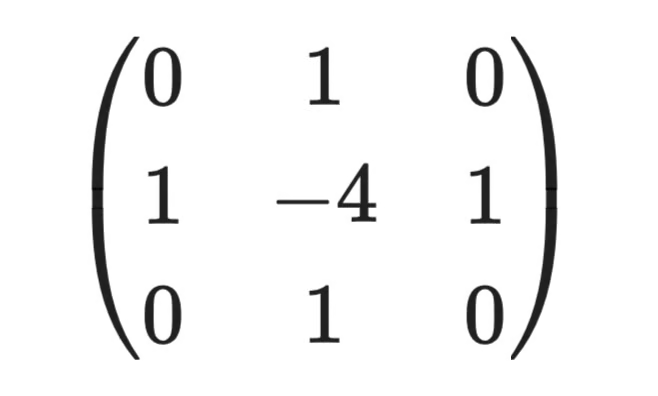
3x3 discrete Laplace-kernel
Het middelste gewicht is -4 en de vier directe buren krijgen elk +1. Wanneer je deze kernel toepast op een pixel, bereken je het verschil tussen de intensiteit van die pixel en het gemiddelde van zijn vier buren — de discrete versie van dezelfde vraag "hoe verhoudt dit punt zich tot zijn omgeving" van eerder.
Ruwe Laplace-filtering is gevoelig voor ruis. Eén ruispixel veroorzaakt een scherpe intensiteitspiek, en de Laplace-operator zal die als rand aanmerken.
De standaardoplossing is om de afbeelding eerst te vervagen met een Gaussiaanse blur en daarna de Laplace-operator toe te passen. Deze combinatie heet de Laplacian of Gaussian (LoG). De Gaussiaan onderdrukt ruis en de Laplace-operator vindt de echte randen.
In deep learning leren convolutionele neurale netwerken hun eigen randdetectiefilters uit data — maar die geleerde filters lijken vaak op de Laplace-kernel. Dus op een bepaalde manier herontdekken neurale netwerken dezelfde wiskunde die de Laplace-operator nuttig maakte in klassieke computervisie.
De Laplace-operator is drie verwante ideeën die in verschillende contexten opduiken.
Begrijpen met welke versie je werkt, voorkomt veel verwarring wanneer je schakelt tussen calculusboeken, numerieke code en papers over graaf-ML.
De continue Laplace-operator is die uit de calculus. Voor een gladde functie f gedefinieerd over een continue ruimte, is het de som van tweede partiële afgeleiden:

De continue Laplace-operator
Deze versie gaat ervan uit dat je functie overal glad en differentieerbaar is. Het is de theoretische basis — maar echte data is nooit continu. Je kunt geen exacte afgeleiden berekenen op een raster van pixels of een tabel met metingen.
Wanneer je overstapt van continue functies naar bemonsterde data, worden afgeleiden vervangen door eindige verschillen — benaderingen die uit naburige waarden worden berekend.
Voor een 1D-functie bemonsterd op gelijkmatig verdeelde punten is de discrete tweede afgeleide op punt i:
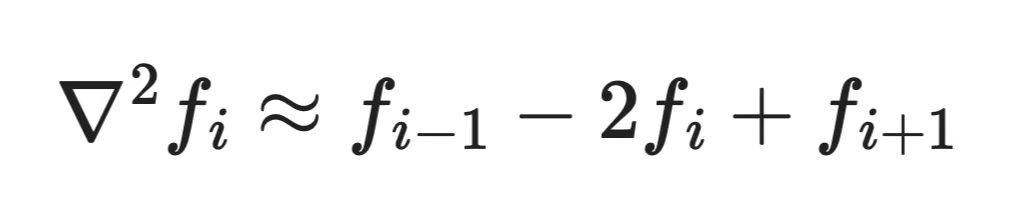
De discrete Laplace-operator
Je vergelijkt de waarde op i met zijn twee buren. Hetzelfde idee breidt zich uit naar 2D-rasters (afbeeldingen), 3D-volumes en verder. De convolutiekernels uit de beeldverwerkingssectie zijn precies dit — eindigeverschilbenaderingen van de continue Laplace-operator, toegepast op een pixelraster.
Deze discretisatie maakt de Laplace-operator berekenbaar in numerieke methoden en ML-pipelines. Telkens wanneer je in code een Laplace-filter toepast, draai je een eindigeverschilbenadering, niet de exacte calculusoperator.
De graaf-Laplaciaan gaat een stap verder in discretisatie. In plaats van een regelmatig raster met uniforme afstand heb je een willekeurige set knopen verbonden door randen met verschillende gewichten.
Er is hier geen notie van "naburige pixel" — alleen knopen en de verbindingen daartussen. De graaf-Laplaciaan L = D - A vervangt de eindigeverschilstructuur door adjacentiestructuur. Dezelfde kernvraag blijft: hoe verhoudt de waarde van een knoop zich tot die van zijn buren? Maar "buren" wordt nu gedefinieerd door de graaf, niet door ruimtelijke nabijheid.
De meeste ML-data leeft niet op een regelmatig raster. Moleculen, sociale netwerken, kennisgrafen en 3D-puntenwolken hebben allemaal een onregelmatige structuur. Je kunt daar geen standaard eindigeverschil-Laplace-operator op toepassen.
De graaf-Laplaciaan lost dit op door de buurtstructuur expliciet te maken via de adjacentiematrix. Daarom kunnen graafneurale netwerken en spectrale methoden Laplace-gebaseerde bewerkingen toepassen op data zonder natuurlijk coördinatensysteem.
Laten we dit concreet maken met twee voorbeelden — één continu, één graafgebaseerd.
Neem de functie f(x, y) = x² + y². Dit is een eenvoudige paraboloïde — een komvorm die in elke richting omhoog kromt.
Om de Laplace-operator te berekenen, heb je de tweede partiële afgeleide nodig ten opzichte van elke variabele.
Eerst naar x:
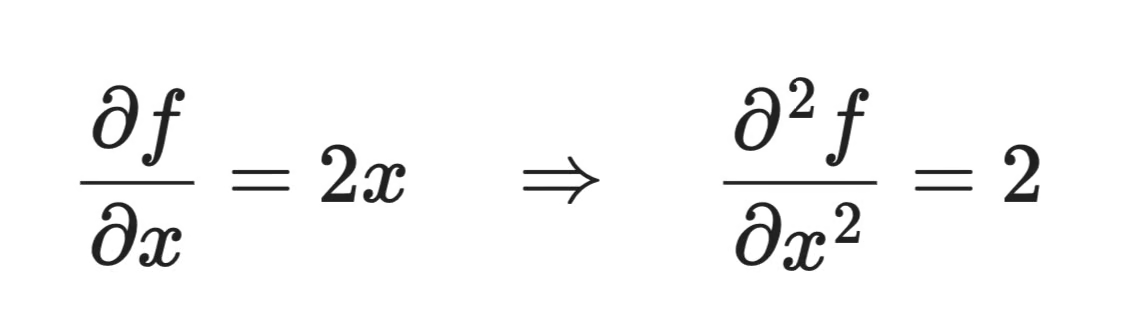
Berekening van de continue Laplace-operator (1)
Dan naar y:

Berekening van de continue Laplace-operator (2)
En nu tel je ze gewoon op:

Berekening van de continue Laplace-operator (3)
De Laplace-operator is overal constant 4. Dat is logisch, want een paraboloïde heeft op elk punt dezelfde kromming. De positieve waarde vertelt je dat de functie in alle richtingen omhoog kromt, in lijn met de komvorm.
Neem een graaf met 4 knopen en de volgende randen:
De adjacentiematrix A codeert de verbindingen:

Berekening van de graaf-Laplaciaan (1)
De graadmatrix D zet het aantal verbindingen van elke knoop op de diagonaal:

Berekening van de graaf-Laplaciaan (2)
Knopen 1 en 2 hebben elk 2 verbindingen. Knopen 3 en 4 hebben elk 1.
Trek tenslotte af om L = D - A te krijgen:
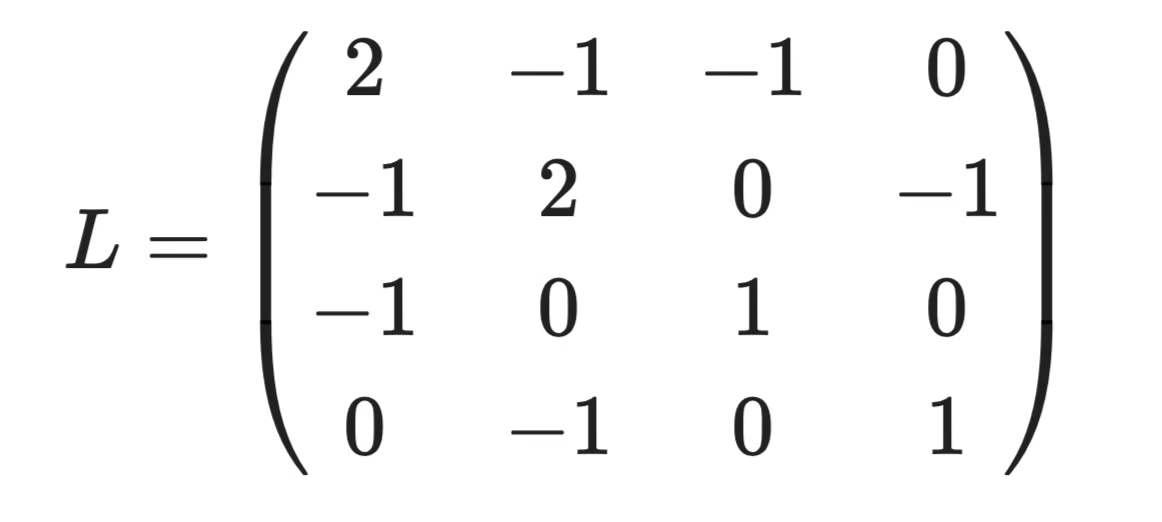
Berekening van de graaf-Laplaciaan (3)
Zo lees je deze matrix: Rij 1 zegt: knoop 1 heeft graad 2 en is verbonden met knoop 2 en 3 (de -1-elementen). Rij 3 zegt: knoop 3 heeft graad 1, alleen verbonden met knoop 1. De nullen vertellen je welke knopenparen geen rand delen.
Je kunt het ook in Python berekenen ter verificatie:
import numpy as np
A = np.array([
[0, 1, 1, 0],
[1, 0, 0, 1],
[1, 0, 0, 0],
[0, 1, 0, 0]
])
D = np.diag(A.sum(axis=1))
L = D - A
print(L)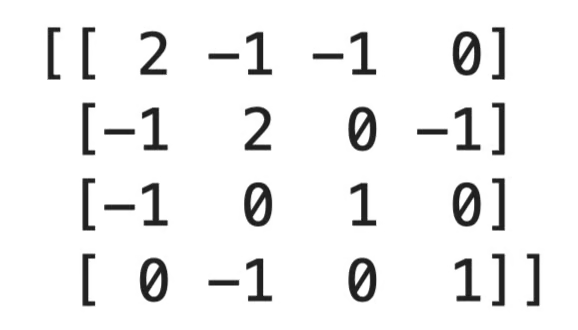
Berekening van de graaf-Laplaciaan in Python
De Laplace-operator lijkt op een paar andere concepten, en de verschillen zijn niet altijd duidelijk op basis van de namen alleen. In deze sectie probeer ik alle verwarringspunten weg te nemen.
De gradiënt ∇f is een vector. Hij wijst in de richting van de snelste toename en zijn grootte vertelt hoe snel de functie stijgt. Hij gebruikt eerste afgeleiden.
De Laplace-operator ∇²f is een scalair. Hij vertelt je niet in welke richting je moet bewegen — hij vertelt je over de vorm van de functie op een punt. Hij is opgebouwd uit tweede afgeleiden.
Dit is de valkuil die mensen het vaakst treft.
De Hessiaan H is een matrix van alle tweede partiële afgeleiden. Voor een functie met n inputs is het een n × n matrix die vastlegt hoe de gradiënt verandert langs elk paar assen. Hij geeft je het volledige krommingsbeeld.
De Laplace-operator is het spoor van de Hessiaan — de som van zijn diagonaalelementen. Je verliest de informatie over de niet-diagonale kromming, maar je krijgt één getal dat snel te berekenen is.
Gebruik de Hessiaan wanneer je de complete krommingsuitsplitsing nodig hebt. Gebruik de Laplace-operator wanneer een scalaire samenvatting volstaat.
Ze delen een naam en dezelfde kernintuïtie, maar werken op volledig verschillende objecten.
De differentiale Laplace-operator werkt op gladde, continue functies. Hij vereist afgeleiden, wat betekent dat hij ervan uitgaat dat je functie overal differentieerbaar is.
De graaf-Laplaciaan L = D - A werkt op grafen — discrete structuren met knopen en randen. Er komen geen afgeleiden aan te pas. Hij meet met matrixbewerkingen hoe de waarde op elke knoop verschilt van die van zijn buren.
De connectie is conceptueel, niet computationeel. Beide meten lokale afwijking van een buur gemiddelde, maar zijn verder volledig verschillend.
Sommige vakgebieden definiëren de Laplace-operator met een negatief teken: -∇²f. Je ziet dit in de natuurkunde en in sommige ML-papers over graafneurale netwerken. De negatieve Laplacian −L is positief semidefiniet, wat fijnere eigenschappen heeft voor bepaalde optimalisatieproblemen en eigenwaardeanalyse overzichtelijker maakt.
Als je een paper leest en de eigenwaarden van de Laplace-operator zijn allemaal niet-negatief, kijk dan of ze L of -L gebruiken. De wiskunde is equivalent, maar conventies door elkaar halen kan tot verkeerde resultaten leiden.
Je hebt nu gezien dat de Laplace-operator voorkomt in calculus, graaftheorie, beeldverwerking en optimalisatie. Dezelfde operator lost hetzelfde fundamentele probleem op in verschillende contexten: meten hoe een waarde op één punt zich verhoudt tot zijn omgeving.
Hier komt dat in data science terug:
Graafgebaseerde ML: De graaf-Laplaciaan L = D - A is de basis van spectrale methoden. Telkens wanneer je data een natuurlijke graafstructuur heeft, geeft de Laplace-operator je een matrix die het volledige connectiviteitspatroon codeert in een vorm waar je lineaire algebra op kunt toepassen
Clustering: Spectrale clustering gebruikt de eigenvectoren van L om groepen te vinden die zuiver afstandsgebaseerde methoden missen. Het werkt goed wanneer clusters niet convex of lineair separabel zijn
Semi-supervised learning: Veel semi-supervised methoden gebruiken de graaf-Laplaciaan om labels te propagëren van gelabelde naar ongelabelde knopen. De aanname is dat verbonden knopen waarschijnlijk hetzelfde label delen, en de Laplace-operator kwantificeert hoe soepel labels over de graaf zouden moeten variëren
Manifold learning: Algoritmen zoals Laplacian Eigenmaps gebruiken de graaf-Laplaciaan om laag-dimensionale representaties van hoog-dimensionale data te vinden. De eigenvectoren van L brengen nabije punten in de oorspronkelijke ruimte naar nabije punten in de gereduceerde ruimte
Beeldkenmerkextractie: De discrete Laplace-operator detecteert randen en gebieden met snelle intensiteitsverandering. Die kenmerken gaan direct door in zowel klassieke computervisie-pipelines als als priors in deep learning-architecturen
Kortom, de Laplace-operator is een van de weinige wiskundige tools die schaalt van een enkele calculusvergelijking tot grote graafneurale netwerken.
De Laplace-operator begint als een calculusoperator, een manier om kromming in continue functies te meten. Tegen de tijd dat je bij graafgebaseerde ML komt, is het een matrix die de structuur van een heel netwerk codeert. Het kernidee is precies hetzelfde, alleen de vorm is anders.
Schrijf je in voor onze cursus Linear Algebra for Data Science in R voor hands-on ervaring met veel concepten en onderwerpen die in dit artikel aan bod komen.
Leren met DataCamp
Cursus
Cursus
Cursus
blog
Adel Nehme
15 min
