Kurs
Maschinelles Lernen mit baumbasierten Modellen in Python
5 Std.
116.4K
Bevor wir PPO implementieren, müssen wir die erforderlichen Softwarebibliotheken installieren und eine geeignete Umgebung für die Anwendung der Richtlinie auswählen.
Wir müssen die folgende Software installieren:
numpy (für mathematische und statistische Funktionen) und matplotlib (zum Plotten von Diagrammen).gym durch den Upgrade-Prozess manchmal ändert, frieren wir in diesem Beispiel die Version auf 0.25.2. Um auf einem Server oder einem lokalen Rechner zu installieren, führe aus:
$ pip install torch numpy matplotlib gym==0.25.2Für die Installation mit einem Notebook wie Google Colaboder DataLab verwendest du:
!pip install torch numpy matplotlib gym==0.25.2Verwende OpenAI Gym, um zwei Instanzen der CartPole-Umgebung zu erstellen (eine zum Trainieren und eine zum Testen):
env_train = gym.make('CartPole-v1')
env_test = gym.make('CartPole-v1')Jetzt wollen wir PPO mit PyTorch implementieren.
Wie bereits erläutert, wird das PPO als akteurskritisches Modell umgesetzt. Der Akteur setzt die Politik um, und der Kritiker sagt ihren geschätzten Wert voraus. Neuronale Netze von Akteuren und Kritikern nehmen den gleichen Input - den Zustand in jedem Zeitschritt. So können sich das Akteurs- und das Kritikermodell ein gemeinsames neuronales Netz teilen, das als Backbone-Architektur bezeichnet wird. Der Akteur und der Kritiker können die Backbone-Architektur mit zusätzlichen Schichten erweitern.
Die folgenden Schritte beschreiben das Backbone-Netzwerk:
Der folgende Code implementiert das Backbone:
class BackboneNetwork(nn.Module):
def __init__(self, in_features, hidden_dimensions, out_features, dropout):
super().__init__()
self.layer1 = nn.Linear(in_features, hidden_dimensions)
self.layer2 = nn.Linear(hidden_dimensions, hidden_dimensions)
self.layer3 = nn.Linear(hidden_dimensions, out_features)
self.dropout = nn.Dropout(dropout)
def forward(self, x):
x = self.layer1(x)
x = f.relu(x)
x = self.dropout(x)
x = self.layer2(x)
x = f.relu(x)
x = self.dropout(x)
x = self.layer3(x)
return xNun können wir dieses Netzwerk nutzen, um die Akteur-Kritik-Klasse ActorCritic zu definieren. Der Akteur modelliert die Politik und sagt die Handlung voraus. Der Kritiker modelliert die Wertfunktion und sagt den Wert voraus. Sie nehmen beide den Zustand als Input.
class ActorCritic(nn.Module):
def __init__(self, actor, critic):
super().__init__()
self.actor = actor
self.critic = critic
def forward(self, state):
action_pred = self.actor(state)
value_pred = self.critic(state)
return action_pred, value_predWir verwenden die oben definierten Netzwerke, um einen Schauspieler und einen Kritiker zu erstellen. Dann erstellen wir einen Agenten, der den Schauspieler und den Kritiker enthält.
Bevor du den Agenten erstellst, musst du die Parameter des Netzwerks initialisieren:
Der folgende Code zeigt, wie du die Akteurs- und Kritiker-Netzwerke auf der Grundlage des Backbone-Netzwerks deklarierst:
def create_agent(hidden_dimensions, dropout):
INPUT_FEATURES = env_train.observation_space.shape[0]
HIDDEN_DIMENSIONS = hidden_dimensions
ACTOR_OUTPUT_FEATURES = env_train.action_space.n
CRITIC_OUTPUT_FEATURES = 1
DROPOUT = dropout
actor = BackboneNetwork(
INPUT_FEATURES, HIDDEN_DIMENSIONS, ACTOR_OUTPUT_FEATURES, DROPOUT)
critic = BackboneNetwork(
INPUT_FEATURES, HIDDEN_DIMENSIONS, CRITIC_OUTPUT_FEATURES, DROPOUT)
agent = ActorCritic(actor, critic)
return agentDie Umgebung gibt eine Belohnung, die von jedem Schritt zum nächsten geht, abhängig von der Aktion des Agenten. Die Belohnung, R, wird wie folgt ausgedrückt:
![]()
Die Rendite ist definiert als der kumulierte Wert der erwarteten zukünftigen Erträge. Belohnungen aus Zeitschritten, die weiter in der Zukunft liegen, sind weniger wertvoll als unmittelbare Belohnungen. Daher wird die Rendite in der Regel als diskontierte Rendite G berechnet, die wie folgt definiert ist:
![]()
In diesem Tutorial (und in vielen anderen Referenzen) bezieht sich der Begriff Rendite auf die abgezinste Rendite.
So berechnest du die Rendite:
Die Funktion calculate_returns() führt diese Berechnungen durch, wie unten gezeigt:
def calculate_returns(rewards, discount_factor):
returns = []
cumulative_reward = 0
for r in reversed(rewards):
cumulative_reward = r + cumulative_reward * discount_factor
returns.insert(0, cumulative_reward)
returns = torch.tensor(returns)
# normalize the return
returns = (returns - returns.mean()) / returns.std()
return returnsDer Vorteil errechnet sich aus der Differenz zwischen dem vom Kritiker vorhergesagten Wert und dem erwarteten Ertrag aus den Handlungen, die der Akteur gemäß der Strategie gewählt hat. Für eine bestimmte Handlung drückt der Vorteil den Nutzen aus, den diese spezifische Handlung gegenüber einer beliebigen (durchschnittlichen) Handlung hat.
In dem ursprünglichen PPO-Papier (Gleichung 10) wird der Vorteil mit Blick auf den Zeitschritt T wie folgt ausgedrückt:
![]()
Bei der Codierung des Algorithmus wird die Bedingung, bis zu einer bestimmten Anzahl von Zeitschritten in die Zukunft zu blicken, durch die Stapelgröße erzwungen. Die obige Gleichung lässt sich also vereinfacht als die Differenz zwischen dem Wert und den erwarteten Erträgen darstellen. Die erwarteten Renditen werden in der State-Action-Value-Funktion, Q, quantifiziert.
Die folgende vereinfachte Formel drückt also den Vorteil der Wahl aus:
Dies wird ausgedrückt als:
![]()
Auch OpenAI nutzt diese Formel , um RL zu implementieren. Dieunten abgebildete Funktion calculate_advantages() berechnet den Vorteil:
def calculate_advantages(returns, values):
advantages = returns - values
# Normalize the advantage
advantages = (advantages - advantages.mean()) / advantages.std()
return advantagesDer Versicherungsverlust wäre der normale Gradientenverlust ohne spezielle Techniken wie PPO. Der Standard-Gradientenverlust wird berechnet als das Produkt aus:
Der Standard-Gradientenverlust kann keine Korrekturen für abrupte Änderungen der Politik vornehmen. Der Ersatzverlust modifiziert den Standardverlust, um den Betrag zu begrenzen, den die Police in jeder Iteration ändern kann. Es ist das Minimum von zwei Mengen:
Für den Optimierungsprozess wird der Surrogatverlust als Ersatz für den tatsächlichen Verlust verwendet.
Die Politikquote, Rist der Unterschied zwischen der neuen und der alten Politik und wird als Verhältnis der logarithmischen Wahrscheinlichkeiten der Politik unter den neuen und alten Parametern angegeben:
![]()
Das abgeschnittene Politikverhältnis, R'ist so begrenzt, dass:
![]()
Wenn du den Vorteil hast, Atwie im vorangegangenen Abschnitt gezeigt, und der Politikquote, wie oben gezeigt, wird der Ersatzverlust wie folgt berechnet:
Der folgende Code zeigt, wie der Clipping-Mechanismus und der Surrogatverlust implementiert werden.
def calculate_surrogate_loss(
actions_log_probability_old,
actions_log_probability_new,
epsilon,
advantages):
advantages = advantages.detach()
policy_ratio = (
actions_log_probability_new - actions_log_probability_old
).exp()
surrogate_loss_1 = policy_ratio * advantages
surrogate_loss_2 = torch.clamp(
policy_ratio, min=1.0-epsilon, max=1.0+epsilon
) * advantages
surrogate_loss = torch.min(surrogate_loss_1, surrogate_loss_2)
return surrogate_lossJetzt wollen wir den Agenten trainieren.
Jetzt können wir die Verluste aus der Police und den Wert berechnen:
Beide Verluste, die oben berechnet wurden, sind Tensoren. Der Gradientenabstieg basiert auf skalaren Werten. Um einen einzelnen skalaren Wert zu erhalten, der den Verlust darstellt, benutze die Funktion .sum(), um die Tensorelemente zu summieren. Die folgende Funktion zeigt, wie man das macht:
def calculate_losses(
surrogate_loss, entropy, entropy_coefficient, returns, value_pred):
entropy_bonus = entropy_coefficient * entropy
policy_loss = -(surrogate_loss + entropy_bonus).sum()
value_loss = f.smooth_l1_loss(returns, value_pred).sum()
return policy_loss, value_lossBevor du mit dem Training beginnst, erstelle eine Reihe von Puffern als leere Arrays. Der Trainingsalgorithmus verwendet diese Puffer, um Informationen über die Aktionen des Agenten, die Zustände der Umgebung und die Belohnungen in jedem Zeitschritt zu speichern. Die folgende Funktion initialisiert diese Puffer:
def init_training():
states = []
actions = []
actions_log_probability = []
values = []
rewards = []
done = False
episode_reward = 0
return states, actions, actions_log_probability, values, rewards, done, episode_rewardBei jeder Trainingsiteration wird der Agent mit den Parametern für die jeweilige Iteration ausgeführt. Der Agent interagiert mit der Umwelt in Zeitschritten in einer Schleife, bis er einen Endzustand erreicht.
Nach jedem Zeitschritt werden die Aktion, die Belohnung und der Wert des Agenten an die jeweiligen Puffer angehängt. Wenn die Episode beendet ist, gibt die Funktion den aktualisierten Satz von Puffern zurück, der die Ergebnisse der Episode zusammenfasst.
Bevor du die Trainingsschleife ausführst:
agent.train() in den Trainingsmodus. env.reset() in einen zufälligen Zustand zurück. Dies ist der Ausgangszustand für diese Trainingsiteration. Die folgenden Schritte erklären, was in den einzelnen Zeitschritten der Trainingsschleife passiert:
dist.sample(). env.step(), um diese Aktion an die Umgebung zu übergeben und die Reaktion der Umgebung für diesen Zeitschritt zu simulieren. Basierend auf der Aktion des Agenten erzeugt die Umgebung:done (dieser zeigt an, ob die Umgebung einen Endzustand erreicht hat)Die Trainingsepisode endet, wenn die Funktion env.step() für den booleschen Rückgabewert von done den Wert true zurückgibt.
Nach Beendigung der Episode berechnest du anhand der kumulierten Werte aus jedem Zeitschritt den kumulativen Ertrag dieser Episode, indem du die Belohnungen aus jedem Zeitschritt addierst. Dazu verwenden wir die bereits beschriebene Funktion calculate_returns(). Die Eingaben dieser Funktion sind der Diskontierungsfaktor und der Puffer, der die Belohnungen aus jedem Zeitschritt enthält. Wir verwenden diese Renditen und die kumulierten Werte aus jedem Zeitschritt, um die Vorteile mithilfe der Funktion calculate_advantages() zu berechnen.
Die folgende Python-Funktion zeigt, wie man diese Schritte umsetzt:
def forward_pass(env, agent, optimizer, discount_factor):
states, actions, actions_log_probability, values, rewards, done, episode_reward = init_training()
state = env.reset()
agent.train()
while not done:
state = torch.FloatTensor(state).unsqueeze(0)
states.append(state)
action_pred, value_pred = agent(state)
action_prob = f.softmax(action_pred, dim=-1)
dist = distributions.Categorical(action_prob)
action = dist.sample()
log_prob_action = dist.log_prob(action)
state, reward, done, _ = env.step(action.item())
actions.append(action)
actions_log_probability.append(log_prob_action)
values.append(value_pred)
rewards.append(reward)
episode_reward += reward
states = torch.cat(states)
actions = torch.cat(actions)
actions_log_probability = torch.cat(actions_log_probability)
values = torch.cat(values).squeeze(-1)
returns = calculate_returns(rewards, discount_factor)
advantages = calculate_advantages(returns, values)
return episode_reward, states, actions, actions_log_probability, advantages, returnsBei jeder Trainingsiteration durchläuft das Modell eine komplette Episode, die aus vielen Zeitschritten besteht (bis es einen Endzustand erreicht). In jedem Zeitschritt speichern wir die Politikparameter, die Aktionen des Agenten, die Erträge und die Vorteile. Nach jeder Iteration aktualisieren wir das Modell auf der Grundlage der Leistung der Politik in allen Zeitschritten dieser Iteration.
Die maximale Anzahl von Zeitschritten in der CartPole Umgebung beträgt 500. In komplexeren Umgebungen gibt es mehr Zeitabschnitte, sogar Millionen. In solchen Fällen muss der Datensatz mit den Trainingsergebnissen in Stapel aufgeteilt werden. Die Anzahl der Zeitschritte in jedem Stapel wird als Optimierungsstapelgröße bezeichnet.
Die Schritte zur Aktualisierung der Modellparameter sind also folgende:
.backward() separat für die Police aus und bewerte die Verluste. Dadurch werden die Gradienten der Verlustfunktionen aktualisiert. .step() für den Optimierer aus, um die Richtlinienparameter zu aktualisieren. In diesem Fall verwenden wir den Adam-Optimierer, um ein Gleichgewicht zwischen Geschwindigkeit und Robustheit herzustellen. PPO_STEPS. Die Wiederholung des Rückwärtsdurchlaufs bei jedem Stapel ist rechnerisch effizient, weil dadurch die Größe des Trainingsdatensatzes effektiv erhöht wird, ohne dass zusätzliche Vorwärtsdurchläufe erforderlich sind. Die Anzahl der Umgebungsschritte bei jedem Wechsel zwischen Probenahme und Optimierung wird als Iterationsgröße bezeichnet. Der folgende Code setzt diese Schritte um:
def update_policy(
agent,
states,
actions,
actions_log_probability_old,
advantages,
returns,
optimizer,
ppo_steps,
epsilon,
entropy_coefficient):
BATCH_SIZE = 128
total_policy_loss = 0
total_value_loss = 0
actions_log_probability_old = actions_log_probability_old.detach()
actions = actions.detach()
training_results_dataset = TensorDataset(
states,
actions,
actions_log_probability_old,
advantages,
returns)
batch_dataset = DataLoader(
training_results_dataset,
batch_size=BATCH_SIZE,
shuffle=False)
for _ in range(ppo_steps):
for batch_idx, (states, actions, actions_log_probability_old, advantages, returns) in enumerate(batch_dataset):
# get new log prob of actions for all input states
action_pred, value_pred = agent(states)
value_pred = value_pred.squeeze(-1)
action_prob = f.softmax(action_pred, dim=-1)
probability_distribution_new = distributions.Categorical(
action_prob)
entropy = probability_distribution_new.entropy()
# estimate new log probabilities using old actions
actions_log_probability_new = probability_distribution_new.log_prob(actions)
surrogate_loss = calculate_surrogate_loss(
actions_log_probability_old,
actions_log_probability_new,
epsilon,
advantages)
policy_loss, value_loss = calculate_losses(
surrogate_loss,
entropy,
entropy_coefficient,
returns,
value_pred)
optimizer.zero_grad()
policy_loss.backward()
value_loss.backward()
optimizer.step()
total_policy_loss += policy_loss.item()
total_value_loss += value_loss.item()
return total_policy_loss / ppo_steps, total_value_loss / ppo_stepsLass uns endlich den PPO-Agenten testen.
Um die Leistung des Agenten zu bewerten, erstellst du eine neue Umgebung und berechnest die kumulierten Belohnungen aus dem Betrieb des Agenten in dieser neuen Umgebung. Du musst den Agenten mit der Funktion .eval() in den Evaluierungsmodus versetzen. Die Schritte sind die gleichen wie bei der Trainingsschleife. Der folgende Codeschnipsel implementiert die Bewertungsfunktion:
def evaluate(env, agent):
agent.eval()
rewards = []
done = False
episode_reward = 0
state = env.reset()
while not done:
state = torch.FloatTensor(state).unsqueeze(0)
with torch.no_grad():
action_pred, _ = agent(state)
action_prob = f.softmax(action_pred, dim=-1)
action = torch.argmax(action_prob, dim=-1)
state, reward, done, _ = env.step(action.item())
episode_reward += reward
return episode_rewardWir werden die Matplotlib-Bibliothek verwenden, um den Fortschritt des Trainingsprozesses zu visualisieren. Die folgende Funktion zeigt, wie du die Belohnungen aus der Trainings- und der Testschleife aufzeichnen kannst:
def plot_train_rewards(train_rewards, reward_threshold):
plt.figure(figsize=(12, 8))
plt.plot(train_rewards, label='Training Reward')
plt.xlabel('Episode', fontsize=20)
plt.ylabel('Training Reward', fontsize=20)
plt.hlines(reward_threshold, 0, len(train_rewards), color='y')
plt.legend(loc='lower right')
plt.grid()
plt.show()def plot_test_rewards(test_rewards, reward_threshold):
plt.figure(figsize=(12, 8))
plt.plot(test_rewards, label='Testing Reward')
plt.xlabel('Episode', fontsize=20)
plt.ylabel('Testing Reward', fontsize=20)
plt.hlines(reward_threshold, 0, len(test_rewards), color='y')
plt.legend(loc='lower right')
plt.grid()
plt.show()In den Beispielgrafiken unten zeigen wir die Trainings- und Testbelohnungen, die sich aus der Anwendung der Richtlinie in der Trainings- bzw. Testumgebung ergeben. Beachte, dass die Form dieser Diagramme jedes Mal anders aussehen wird, wenn du den Code ausführst. Das liegt an der Zufälligkeit, die dem Trainingsprozess innewohnt.
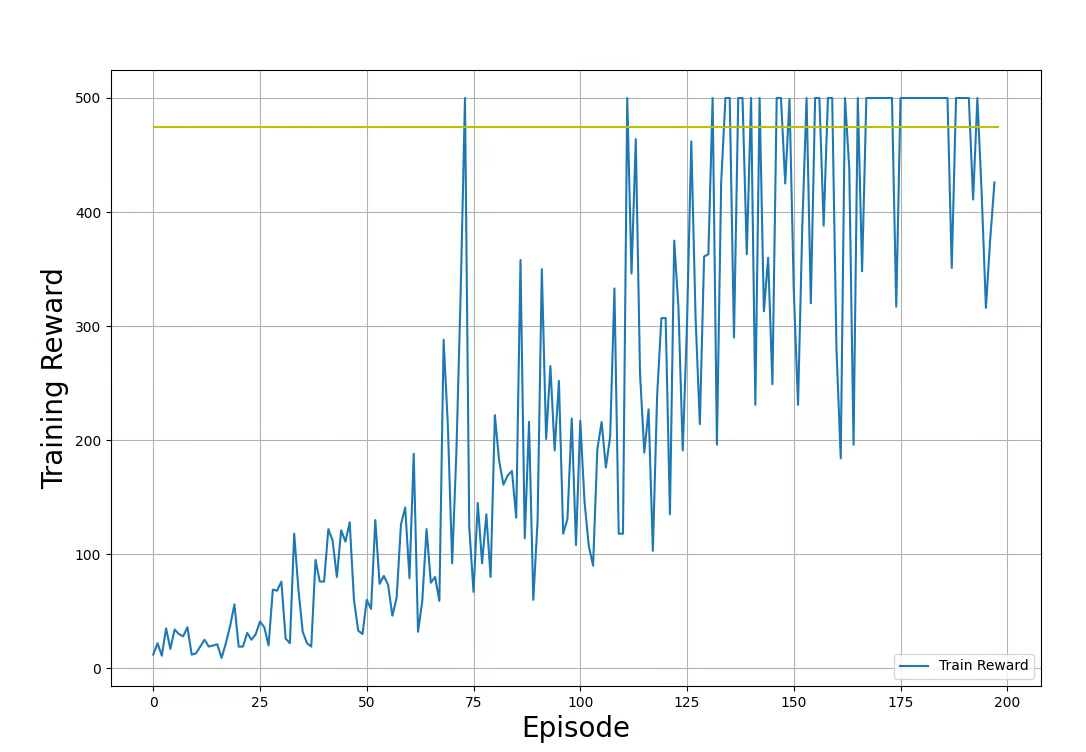
Trainingsbelohnungen (die durch die Anwendung der Strategie in der Trainingsumgebung erzielt werden). Bild vom Autor.
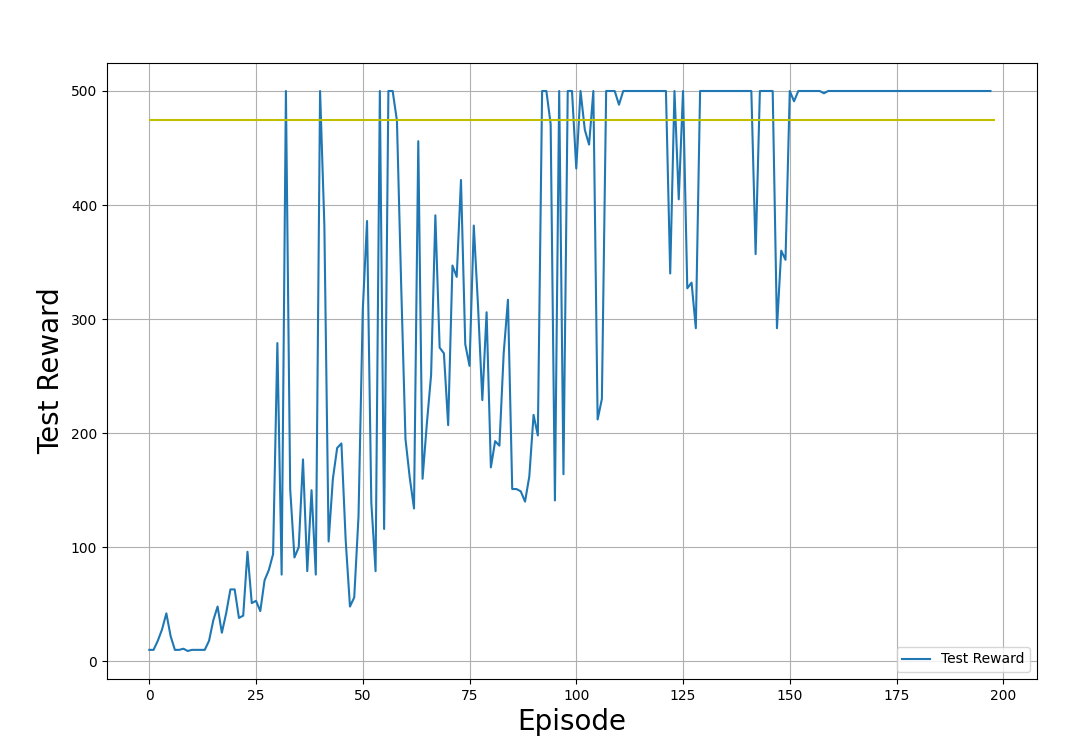
Testbelohnungen (die durch die Anwendung der Richtlinie in der Testumgebung erzielt werden). Bild vom Autor.
In den oben gezeigten Ausgabegrafiken kannst du den Fortschritt des Trainingsprozesses beobachten:
Ebenso kannst du den Wert und die Versicherungsverluste durch die Iterationen darstellen:
def plot_losses(policy_losses, value_losses):
plt.figure(figsize=(12, 8))
plt.plot(value_losses, label='Value Losses')
plt.plot(policy_losses, label='Policy Losses')
plt.xlabel('Episode', fontsize=20)
plt.ylabel('Loss', fontsize=20)
plt.legend(loc='lower right')
plt.grid()
plt.show()Die folgende Beispielgrafik zeigt die Verluste, die durch die Lernpfade entstanden sind:
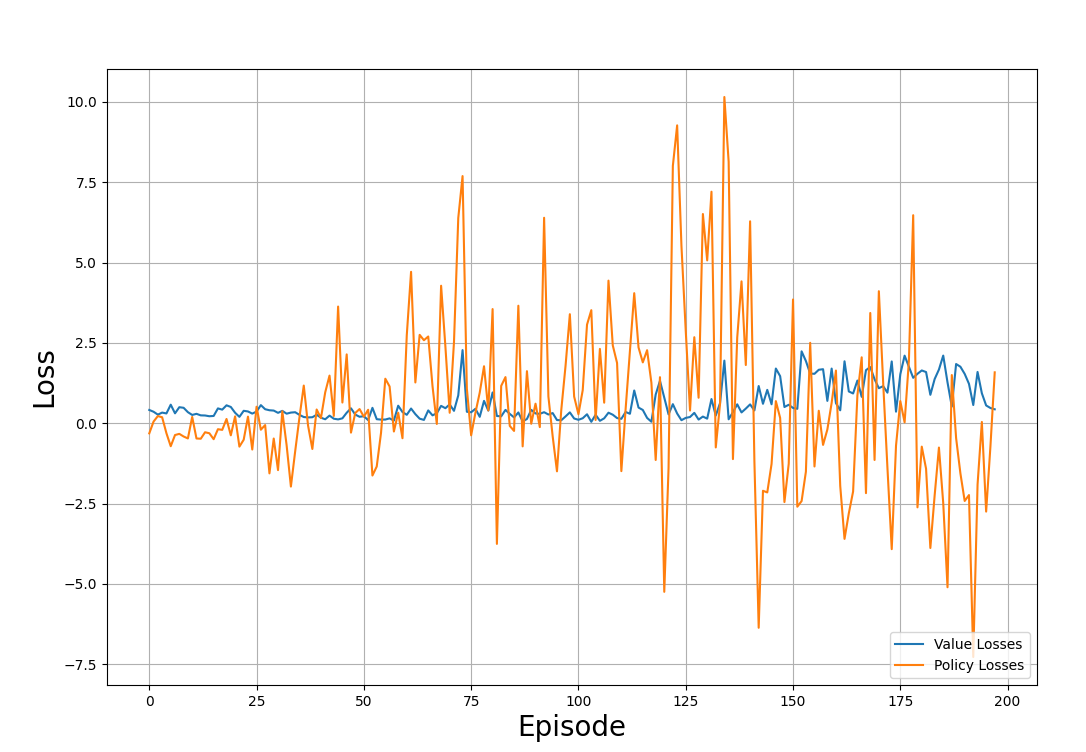
Wert- und Politikverluste durch den Ausbildungsprozess. Bild vom Autor
Beobachte die Handlung und beachte sie:
Du hast jetzt alle Komponenten, um den Agenten mit PPO zu schulen. Um das alles zusammenzufügen, musst du:
create_agent().forward_pass() und update_policy() verwendest. evaluate(). Der folgende Code zeigt, wie man in Python eine Funktion deklariert, die dies tut:
def run_ppo():
MAX_EPISODES = 500
DISCOUNT_FACTOR = 0.99
REWARD_THRESHOLD = 475
PRINT_INTERVAL = 10
PPO_STEPS = 8
N_TRIALS = 100
EPSILON = 0.2
ENTROPY_COEFFICIENT = 0.01
HIDDEN_DIMENSIONS = 64
DROPOUT = 0.2
LEARNING_RATE = 0.001
train_rewards = []
test_rewards = []
policy_losses = []
value_losses = []
agent = create_agent(HIDDEN_DIMENSIONS, DROPOUT)
optimizer = optim.Adam(agent.parameters(), lr=LEARNING_RATE)
for episode in range(1, MAX_EPISODES+1):
train_reward, states, actions, actions_log_probability, advantages, returns = forward_pass(
env_train,
agent,
optimizer,
DISCOUNT_FACTOR)
policy_loss, value_loss = update_policy(
agent,
states,
actions,
actions_log_probability,
advantages,
returns,
optimizer,
PPO_STEPS,
EPSILON,
ENTROPY_COEFFICIENT)
test_reward = evaluate(env_test, agent)
policy_losses.append(policy_loss)
value_losses.append(value_loss)
train_rewards.append(train_reward)
test_rewards.append(test_reward)
mean_train_rewards = np.mean(train_rewards[-N_TRIALS:])
mean_test_rewards = np.mean(test_rewards[-N_TRIALS:])
mean_abs_policy_loss = np.mean(np.abs(policy_losses[-N_TRIALS:]))
mean_abs_value_loss = np.mean(np.abs(value_losses[-N_TRIALS:]))
if episode % PRINT_INTERVAL == 0:
print(f'Episode: {episode:3} | \
Mean Train Rewards: {mean_train_rewards:3.1f} \
| Mean Test Rewards: {mean_test_rewards:3.1f} \
| Mean Abs Policy Loss: {mean_abs_policy_loss:2.2f} \
| Mean Abs Value Loss: {mean_abs_value_loss:2.2f}')
if mean_test_rewards >= REWARD_THRESHOLD:
print(f'Reached reward threshold in {episode} episodes')
break
plot_train_rewards(train_rewards, REWARD_THRESHOLD)
plot_test_rewards(test_rewards, REWARD_THRESHOLD)
plot_losses(policy_losses, value_losses)Führe das Programm aus:
run_ppo()Die Ausgabe sollte dem unten stehenden Beispiel ähneln:
Episode: 10 | Mean Train Rewards: 22.3 | Mean Test Rewards: 30.4 | Mean Abs Policy Loss: 0.37 | Mean Abs Value Loss: 0.39
Episode: 20 | Mean Train Rewards: 38.6 | Mean Test Rewards: 69.8 | Mean Abs Policy Loss: 0.46 | Mean Abs Value Loss: 0.37
.
.
.
Episode: 100 | Mean Train Rewards: 289.5 | Mean Test Rewards: 427.3 | Mean Abs Policy Loss: 1.73 | Mean Abs Value Loss: 0.21
Episode: 110 | Mean Train Rewards: 357.7 | Mean Test Rewards: 461.4 | Mean Abs Policy Loss: 1.86 | Mean Abs Value Loss: 0.22
Reached reward threshold in 116 episodesDu kannst das funktionierendeProgramm auf diesem DataLab-Notebookansehen und ausführen!
Beim maschinellen Lernen steuern die Hyperparameter den Trainingsprozess. Im Folgenden erkläre ich einige der wichtigen Hyperparameter, die im PPO verwendet werden:
PPO_STEPS. In komplexen Umgebungen ist es rechenintensiv, den Vorwärtsdurchlauf viele Male durchzuführen. Eine effizientere Alternative ist es, jeden Batch ein paar Mal zu wiederholen. In der Regel wird empfohlen, einen Wert zwischen 5 und 10 zu verwenden. N_TRIALS ausgedrückt. Wenn dieser Wert höher ist, dauert das Training länger, weil die Strategie den Schwellenwert für die Belohnung in mehr Episoden erreichen muss. Es führt auch zu einer robusteren Politik, ist aber rechenintensiver. Beachte, dass PPO eine stochastische Politik ist und es Episoden geben wird, in denen der Agent die Schwelle nicht überschreitet. Wenn also der Wert von N_TRIALS zu hoch ist, kann es sein, dass dein Training nicht beendet wird.Um die Leistung von PPO-Algorithmen zu optimieren, muss man mit verschiedenen Hyperparametern experimentieren und Fehler machen. Es gibt jedoch einige allgemeine Richtlinien:
Nachdem wir die Konzepte und die Einzelheiten der Umsetzung von PPO erläutert haben, wollen wir die Herausforderungen und die besten Praktiken diskutieren.
Auch wenn PPO weit verbreitet ist, musst du dir der potenziellen Herausforderungen bewusst sein, um reale Probleme mit dieser Technik erfolgreich zu lösen. Einige dieser Herausforderungen sind:
Um mit PPO gute Ergebnisse zu erzielen, empfehle ich dir einige bewährte Methoden, wie zum Beispiel:
PPO_STEPS bezeichnet. In diesem Artikel haben wir über PPO als eine Möglichkeit zur Lösung von RL-Problemen gesprochen. Anschließend haben wir die Schritte zur Implementierung von PPO mit PyTorch beschrieben. Zum Schluss haben wir noch einige Tipps und Best Practices für PPO vorgestellt.
Am besten lernst du, indem du den Code selbst implementierst. Du kannst den Code auch so anpassen, dass er mit anderen klassischen Kontrollumgebungen in Gym funktioniert. Um zu lernen, wie man RL-Agenten mit Python und OpenAIs Gymnasium implementiert, besuche den Kurs Reinforcement Learning with Gymnasium in Python!
Lerne mehr über maschinelles Lernen mit diesen Kursen!
Kurs
Kurs
Kurs
Blog
Nathaniel Taylor-Leach
4 Min.
Blog
Nathaniel Taylor-Leach
8 Min.
Blog
Nathaniel Taylor-Leach
Blog
Nisha Arya Ahmed
15 Min.