Curso
Aprendizado de máquina com modelos baseados em árvores em Python
5 h
116.4K
Antes de implementar a PPO, precisamos instalar as bibliotecas de software de pré-requisito e escolher um ambiente adequado para aplicar a política.
Precisamos instalar o seguinte software:
numpy (para funções matemáticas e estatísticas) e matplotlib (para plotagem de gráficos).gym às vezes muda durante o processo de atualização, neste exemplo, congelamos sua versão para 0.25.2. Para instalar em um servidor ou máquina local, execute:
$ pip install torch numpy matplotlib gym==0.25.2Para instalar usando um Notebook como o Google Colabou o DataLab, use:
!pip install torch numpy matplotlib gym==0.25.2Use o OpenAI Gym para criar duas instâncias (uma para treinamento e outra para teste) do ambiente do CartPole:
env_train = gym.make('CartPole-v1')
env_test = gym.make('CartPole-v1')Agora, vamos implementar o PPO usando o PyTorch.
Conforme explicado anteriormente, o PPO é implementado como um modelo crítico de ator. O ator implementa a política, e o crítico prevê seu valor estimado. As redes neurais de ator e de crítico recebem a mesma entrada - o estado em cada intervalo de tempo. Assim, os modelos de ator e crítico podem compartilhar uma rede neural comum, que é chamada de arquitetura de backbone. O ator e o crítico podem estender a arquitetura de backbone com camadas adicionais.
As etapas a seguir descrevem a rede de backbone:
O código abaixo implementa o backbone:
class BackboneNetwork(nn.Module):
def __init__(self, in_features, hidden_dimensions, out_features, dropout):
super().__init__()
self.layer1 = nn.Linear(in_features, hidden_dimensions)
self.layer2 = nn.Linear(hidden_dimensions, hidden_dimensions)
self.layer3 = nn.Linear(hidden_dimensions, out_features)
self.dropout = nn.Dropout(dropout)
def forward(self, x):
x = self.layer1(x)
x = f.relu(x)
x = self.dropout(x)
x = self.layer2(x)
x = f.relu(x)
x = self.dropout(x)
x = self.layer3(x)
return xAgora, podemos usar essa rede para definir a classe de ator-crítico, ActorCritic. O ator modela a política e prevê a ação. O crítico modela a função de valor e prevê o valor. Ambos usam o estado como entrada.
class ActorCritic(nn.Module):
def __init__(self, actor, critic):
super().__init__()
self.actor = actor
self.critic = critic
def forward(self, state):
action_pred = self.actor(state)
value_pred = self.critic(state)
return action_pred, value_predUsaremos as redes definidas acima para criar um ator e um crítico. Em seguida, criaremos um agente, incluindo o ator e o crítico.
Antes de criar o agente, inicialize os parâmetros da rede:
O código a seguir mostra como declarar o ator e as redes críticas com base na rede de backbone:
def create_agent(hidden_dimensions, dropout):
INPUT_FEATURES = env_train.observation_space.shape[0]
HIDDEN_DIMENSIONS = hidden_dimensions
ACTOR_OUTPUT_FEATURES = env_train.action_space.n
CRITIC_OUTPUT_FEATURES = 1
DROPOUT = dropout
actor = BackboneNetwork(
INPUT_FEATURES, HIDDEN_DIMENSIONS, ACTOR_OUTPUT_FEATURES, DROPOUT)
critic = BackboneNetwork(
INPUT_FEATURES, HIDDEN_DIMENSIONS, CRITIC_OUTPUT_FEATURES, DROPOUT)
agent = ActorCritic(actor, critic)
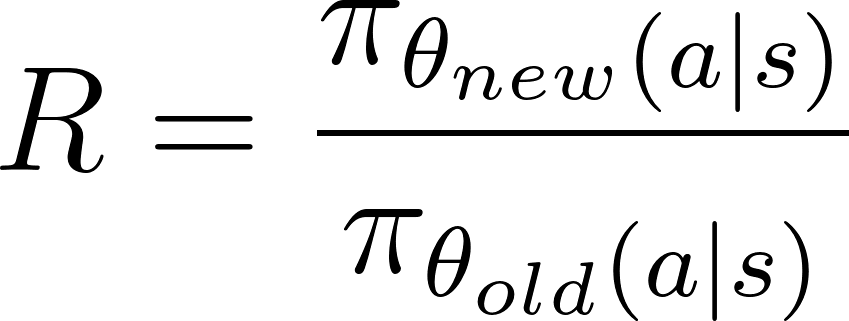
return agentO ambiente oferece uma recompensa de cada etapa para a próxima, dependendo da ação do agente. A recompensa, R, é expressa como:
![]()
O retorno é definido como o valor acumulado das recompensas futuras esperadas. As recompensas de etapas de tempo mais distantes no futuro são menos valiosas do que as recompensas imediatas. Assim, o retorno é normalmente calculado como o retorno descontado, G, definido como:
![]()
Neste tutorial (e em muitas outras referências), retorno refere-se ao retorno descontado.
Para calcular o retorno:
A função calculate_returns() realiza esses cálculos, conforme mostrado abaixo:
def calculate_returns(rewards, discount_factor):
returns = []
cumulative_reward = 0
for r in reversed(rewards):
cumulative_reward = r + cumulative_reward * discount_factor
returns.insert(0, cumulative_reward)
returns = torch.tensor(returns)
# normalize the return
returns = (returns - returns.mean()) / returns.std()
return returnsA vantagem é calculada como a diferença entre o valor previsto pelo crítico e o retorno esperado das ações escolhidas pelo ator de acordo com a política. Para uma determinada ação, a vantagem expressa o benefício de realizar essa ação específica em relação a uma ação arbitrária (média).
No documento original do PPO (equação 10), a vantagem, olhando para frente até o intervalo de tempo T, é expressa como:
![]()
Durante a codificação do algoritmo, a restrição de olhar para a frente até um número definido de passos de tempo é imposta por meio do tamanho do lote. Portanto, a equação acima pode ser simplificada como a diferença entre o valor e os retornos esperados. Os retornos esperados são quantificados na função de valor da ação do estado, Q.
Assim, a fórmula simplificada abaixo expressa a vantagem da escolha:
Isso é expresso como:
![]()
A OpenAI também usa essa fórmula para implementar a RL. Afunção calculate_advantages() mostrada abaixo calcula a vantagem:
def calculate_advantages(returns, values):
advantages = returns - values
# Normalize the advantage
advantages = (advantages - advantages.mean()) / advantages.std()
return advantagesA perda da apólice seria a perda padrão do gradiente da apólice sem técnicas especiais como PPO. A perda de gradiente da política padrão é calculada como o produto de:
A perda de gradiente de política padrão não pode fazer correções para mudanças abruptas de política. A perda substituta modifica a perda padrão para restringir o valor que a apólice pode alterar em cada iteração. É o mínimo de duas quantidades:
Para o processo de otimização, a perda substituta é usada como um substituto para a perda real.
O índice de política, Ré a diferença entre as políticas novas e antigas e é dada como a razão das probabilidades logarítmicas da política sob os parâmetros novos e antigos:
![]()
A taxa de política cortada, R'é limitado de forma que:
![]()
Dada a vantagem, Atconforme mostrado na seção anterior, e o índice de política, conforme mostrado acima, a perda substituta é calculada como:
O código abaixo mostra como implementar o mecanismo de recorte e a perda substituta.
def calculate_surrogate_loss(
actions_log_probability_old,
actions_log_probability_new,
epsilon,
advantages):
advantages = advantages.detach()
policy_ratio = (
actions_log_probability_new - actions_log_probability_old
).exp()
surrogate_loss_1 = policy_ratio * advantages
surrogate_loss_2 = torch.clamp(
policy_ratio, min=1.0-epsilon, max=1.0+epsilon
) * advantages
surrogate_loss = torch.min(surrogate_loss_1, surrogate_loss_2)
return surrogate_lossAgora, vamos treinar o agente.
Agora estamos prontos para calcular a apólice e o valor das perdas:
Ambas as perdas, conforme computadas acima, são tensores. A descida de gradiente é baseada em valores escalares. Para obter um único valor escalar que represente a perda, use a função .sum() para somar os elementos do tensor. A função abaixo mostra como você pode fazer isso:
def calculate_losses(
surrogate_loss, entropy, entropy_coefficient, returns, value_pred):
entropy_bonus = entropy_coefficient * entropy
policy_loss = -(surrogate_loss + entropy_bonus).sum()
value_loss = f.smooth_l1_loss(returns, value_pred).sum()
return policy_loss, value_lossAntes de iniciar o processo de treinamento, crie um conjunto de buffers como matrizes vazias. O algoritmo de treinamento usará esses buffers para armazenar informações sobre as ações do agente, os estados do ambiente e as recompensas em cada etapa de tempo. A função abaixo inicializa esses buffers:
def init_training():
states = []
actions = []
actions_log_probability = []
values = []
rewards = []
done = False
episode_reward = 0
return states, actions, actions_log_probability, values, rewards, done, episode_rewardCada iteração de treinamento executa o agente com os parâmetros de política para essa iteração. O agente interage com o ambiente em intervalos de tempo em um loop até atingir uma condição terminal.
Após cada intervalo de tempo, a ação, a recompensa e o valor do agente são anexados aos respectivos buffers. Quando o episódio termina, a função retorna o conjunto atualizado de buffers, que resume os resultados do episódio.
Antes de executar o loop de treinamento:
agent.train(). env.reset(). Esse é o estado inicial para essa iteração de treinamento. As etapas a seguir explicam o que acontece em cada intervalo de tempo no loop de treinamento:
dist.sample() faz isso. env.step() para passar essa ação para o ambiente e simular a resposta do ambiente para esse intervalo de tempo. Com base na ação do agente, o ambiente é gerado:done (isso indica se o ambiente atingiu um estado terminal)O episódio de treinamento termina quando a função env.step() retorna true para o valor de retorno booleano de done.
Após o término do episódio, use os valores acumulados de cada etapa do tempo para calcular os retornos acumulados desse episódio, somando as recompensas de cada etapa do tempo. Para isso, usamos a função calculate_returns() descrita anteriormente. As entradas dessa função são o fator de desconto e o buffer que contém as recompensas de cada intervalo de tempo. Usamos esses retornos e os valores acumulados de cada intervalo de tempo para calcular as vantagens usando a função calculate_advantages().
A função Python a seguir mostra como você pode implementar essas etapas:
def forward_pass(env, agent, optimizer, discount_factor):
states, actions, actions_log_probability, values, rewards, done, episode_reward = init_training()
state = env.reset()
agent.train()
while not done:
state = torch.FloatTensor(state).unsqueeze(0)
states.append(state)
action_pred, value_pred = agent(state)
action_prob = f.softmax(action_pred, dim=-1)
dist = distributions.Categorical(action_prob)
action = dist.sample()
log_prob_action = dist.log_prob(action)
state, reward, done, _ = env.step(action.item())
actions.append(action)
actions_log_probability.append(log_prob_action)
values.append(value_pred)
rewards.append(reward)
episode_reward += reward
states = torch.cat(states)
actions = torch.cat(actions)
actions_log_probability = torch.cat(actions_log_probability)
values = torch.cat(values).squeeze(-1)
returns = calculate_returns(rewards, discount_factor)
advantages = calculate_advantages(returns, values)
return episode_reward, states, actions, actions_log_probability, advantages, returnsCada iteração de treinamento executa o modelo por meio de um episódio completo que consiste em várias etapas de tempo (até atingir uma condição terminal). Em cada intervalo de tempo, armazenamos os parâmetros da política, a ação do agente, os retornos e as vantagens. Após cada iteração, atualizamos o modelo com base no desempenho da política em todos os intervalos de tempo dessa iteração.
O número máximo de intervalos de tempo no ambiente do CartPole é 500. Em ambientes mais complexos, há mais etapas de tempo, até mesmo milhões. Nesses casos, o conjunto de dados dos resultados do treinamento deve ser dividido em lotes. O número de passos de tempo em cada lote é chamado de tamanho do lote de otimização.
Assim, as etapas para atualizar os parâmetros do modelo são:
.backward() separadamente na apólice e avalie as perdas. Isso atualiza os gradientes das funções de perda. .step() no otimizador para atualizar os parâmetros da política. Nesse caso, usamos o otimizador Adam para equilibrar velocidade e robustez. PPO_STEPS. A repetição da passagem para trás em cada lote é computacionalmente eficiente porque aumenta efetivamente o tamanho do conjunto de dados de treinamento sem a necessidade de executar passagens para frente adicionais. O número de etapas do ambiente em cada alternância entre amostragem e otimização é chamado de tamanho do lote de iteração. O código abaixo implementa essas etapas:
def update_policy(
agent,
states,
actions,
actions_log_probability_old,
advantages,
returns,
optimizer,
ppo_steps,
epsilon,
entropy_coefficient):
BATCH_SIZE = 128
total_policy_loss = 0
total_value_loss = 0
actions_log_probability_old = actions_log_probability_old.detach()
actions = actions.detach()
training_results_dataset = TensorDataset(
states,
actions,
actions_log_probability_old,
advantages,
returns)
batch_dataset = DataLoader(
training_results_dataset,
batch_size=BATCH_SIZE,
shuffle=False)
for _ in range(ppo_steps):
for batch_idx, (states, actions, actions_log_probability_old, advantages, returns) in enumerate(batch_dataset):
# get new log prob of actions for all input states
action_pred, value_pred = agent(states)
value_pred = value_pred.squeeze(-1)
action_prob = f.softmax(action_pred, dim=-1)
probability_distribution_new = distributions.Categorical(
action_prob)
entropy = probability_distribution_new.entropy()
# estimate new log probabilities using old actions
actions_log_probability_new = probability_distribution_new.log_prob(actions)
surrogate_loss = calculate_surrogate_loss(
actions_log_probability_old,
actions_log_probability_new,
epsilon,
advantages)
policy_loss, value_loss = calculate_losses(
surrogate_loss,
entropy,
entropy_coefficient,
returns,
value_pred)
optimizer.zero_grad()
policy_loss.backward()
value_loss.backward()
optimizer.step()
total_policy_loss += policy_loss.item()
total_value_loss += value_loss.item()
return total_policy_loss / ppo_steps, total_value_loss / ppo_stepsFinalmente, vamos executar o agente PPO.
Para avaliar o desempenho do agente, crie um novo ambiente e calcule as recompensas cumulativas da execução do agente nesse novo ambiente. Você precisa definir o agente para o modo de avaliação usando a função .eval(). As etapas são as mesmas do loop de treinamento. O trecho de código abaixo implementa a função de avaliação:
def evaluate(env, agent):
agent.eval()
rewards = []
done = False
episode_reward = 0
state = env.reset()
while not done:
state = torch.FloatTensor(state).unsqueeze(0)
with torch.no_grad():
action_pred, _ = agent(state)
action_prob = f.softmax(action_pred, dim=-1)
action = torch.argmax(action_prob, dim=-1)
state, reward, done, _ = env.step(action.item())
episode_reward += reward
return episode_rewardUsaremos a biblioteca Matplotlib para visualizar o progresso do processo de treinamento. A função abaixo mostra como plotar as recompensas dos loops de treinamento e teste:
def plot_train_rewards(train_rewards, reward_threshold):
plt.figure(figsize=(12, 8))
plt.plot(train_rewards, label='Training Reward')
plt.xlabel('Episode', fontsize=20)
plt.ylabel('Training Reward', fontsize=20)
plt.hlines(reward_threshold, 0, len(train_rewards), color='y')
plt.legend(loc='lower right')
plt.grid()
plt.show()def plot_test_rewards(test_rewards, reward_threshold):
plt.figure(figsize=(12, 8))
plt.plot(test_rewards, label='Testing Reward')
plt.xlabel('Episode', fontsize=20)
plt.ylabel('Testing Reward', fontsize=20)
plt.hlines(reward_threshold, 0, len(test_rewards), color='y')
plt.legend(loc='lower right')
plt.grid()
plt.show()Nos gráficos de exemplo abaixo, mostramos as recompensas de treinamento e teste, obtidas pela aplicação da política nos ambientes de treinamento e teste, respectivamente. Observe que a forma desses gráficos parecerá diferente toda vez que você executar o código. Isso se deve à aleatoriedade inerente ao processo de treinamento.
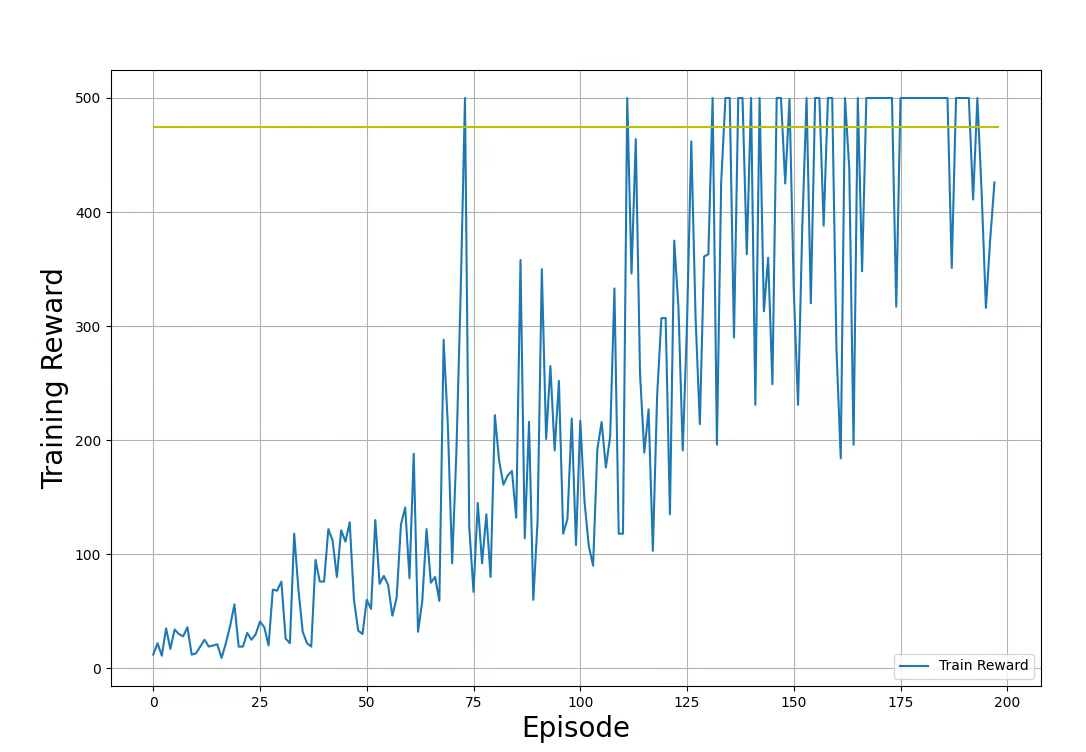
Recompensas de treinamento (obtidas pela aplicação da política no ambiente de treinamento). Imagem do autor.
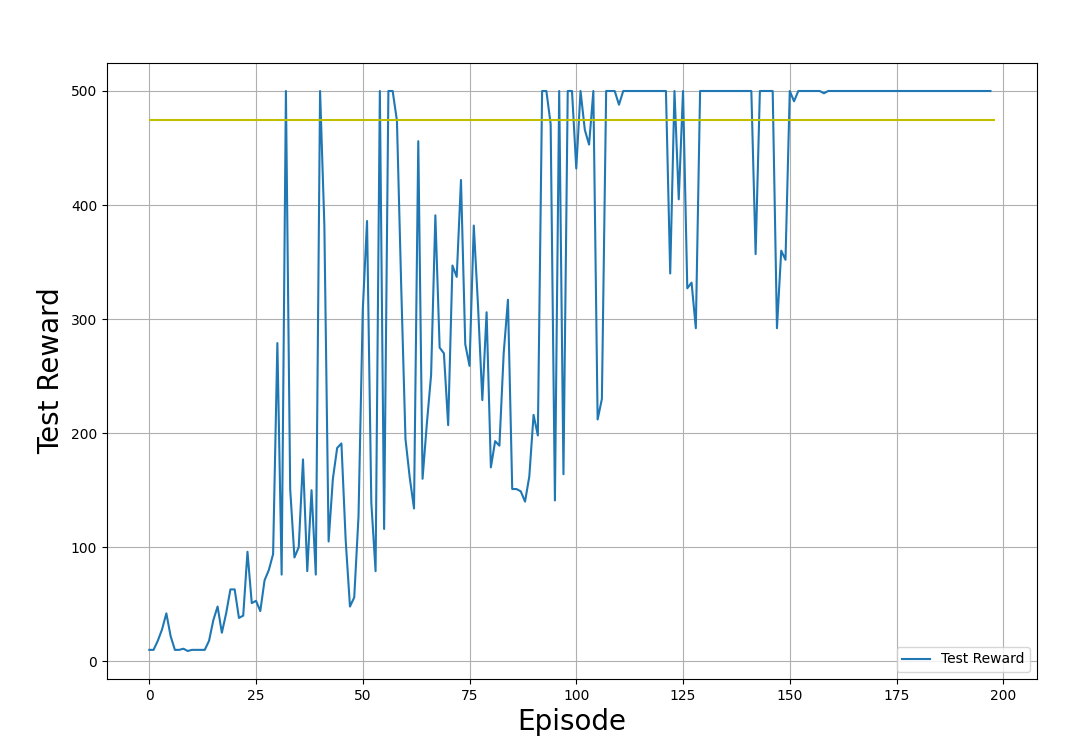
Recompensas de teste (obtidas pela aplicação da política no ambiente de teste). Imagem do autor.
Nos gráficos de saída mostrados acima, observe o progresso do processo de treinamento:
Da mesma forma, você pode traçar o valor e as perdas da apólice por meio das iterações:
def plot_losses(policy_losses, value_losses):
plt.figure(figsize=(12, 8))
plt.plot(value_losses, label='Value Losses')
plt.plot(policy_losses, label='Policy Losses')
plt.xlabel('Episode', fontsize=20)
plt.ylabel('Loss', fontsize=20)
plt.legend(loc='lower right')
plt.grid()
plt.show()O gráfico de exemplo abaixo mostra as perdas rastreadas nos episódios de treinamento:
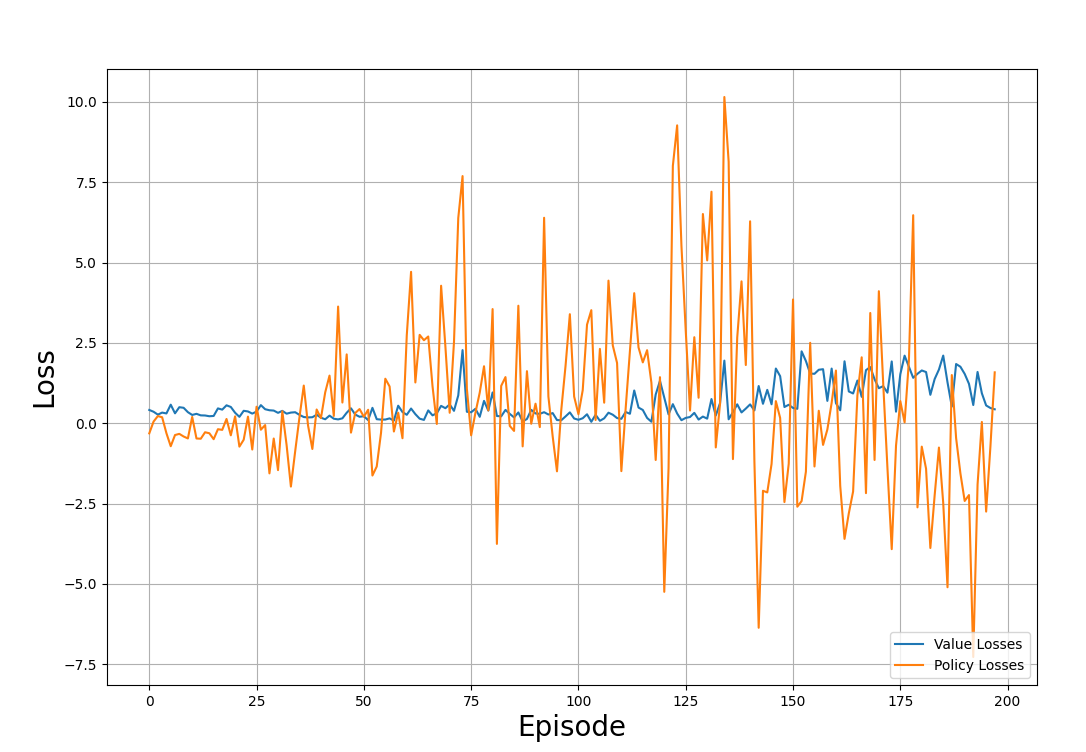
Perdas de valor e de política por meio do processo de treinamento. Imagem do autor
Observe o enredo e perceba:
Agora você tem todos os componentes para treinar o agente usando o PPO. Para juntar tudo isso, você precisa:
create_agent().forward_pass() e update_policy(). evaluate(). O código abaixo mostra como você pode declarar uma função que faz isso no Python:
def run_ppo():
MAX_EPISODES = 500
DISCOUNT_FACTOR = 0.99
REWARD_THRESHOLD = 475
PRINT_INTERVAL = 10
PPO_STEPS = 8
N_TRIALS = 100
EPSILON = 0.2
ENTROPY_COEFFICIENT = 0.01
HIDDEN_DIMENSIONS = 64
DROPOUT = 0.2
LEARNING_RATE = 0.001
train_rewards = []
test_rewards = []
policy_losses = []
value_losses = []
agent = create_agent(HIDDEN_DIMENSIONS, DROPOUT)
optimizer = optim.Adam(agent.parameters(), lr=LEARNING_RATE)
for episode in range(1, MAX_EPISODES+1):
train_reward, states, actions, actions_log_probability, advantages, returns = forward_pass(
env_train,
agent,
optimizer,
DISCOUNT_FACTOR)
policy_loss, value_loss = update_policy(
agent,
states,
actions,
actions_log_probability,
advantages,
returns,
optimizer,
PPO_STEPS,
EPSILON,
ENTROPY_COEFFICIENT)
test_reward = evaluate(env_test, agent)
policy_losses.append(policy_loss)
value_losses.append(value_loss)
train_rewards.append(train_reward)
test_rewards.append(test_reward)
mean_train_rewards = np.mean(train_rewards[-N_TRIALS:])
mean_test_rewards = np.mean(test_rewards[-N_TRIALS:])
mean_abs_policy_loss = np.mean(np.abs(policy_losses[-N_TRIALS:]))
mean_abs_value_loss = np.mean(np.abs(value_losses[-N_TRIALS:]))
if episode % PRINT_INTERVAL == 0:
print(f'Episode: {episode:3} | \
Mean Train Rewards: {mean_train_rewards:3.1f} \
| Mean Test Rewards: {mean_test_rewards:3.1f} \
| Mean Abs Policy Loss: {mean_abs_policy_loss:2.2f} \
| Mean Abs Value Loss: {mean_abs_value_loss:2.2f}')
if mean_test_rewards >= REWARD_THRESHOLD:
print(f'Reached reward threshold in {episode} episodes')
break
plot_train_rewards(train_rewards, REWARD_THRESHOLD)
plot_test_rewards(test_rewards, REWARD_THRESHOLD)
plot_losses(policy_losses, value_losses)Execute o programa:
run_ppo()O resultado deve ser semelhante ao exemplo abaixo:
Episode: 10 | Mean Train Rewards: 22.3 | Mean Test Rewards: 30.4 | Mean Abs Policy Loss: 0.37 | Mean Abs Value Loss: 0.39
Episode: 20 | Mean Train Rewards: 38.6 | Mean Test Rewards: 69.8 | Mean Abs Policy Loss: 0.46 | Mean Abs Value Loss: 0.37
.
.
.
Episode: 100 | Mean Train Rewards: 289.5 | Mean Test Rewards: 427.3 | Mean Abs Policy Loss: 1.73 | Mean Abs Value Loss: 0.21
Episode: 110 | Mean Train Rewards: 357.7 | Mean Test Rewards: 461.4 | Mean Abs Policy Loss: 1.86 | Mean Abs Value Loss: 0.22
Reached reward threshold in 116 episodesVocê pode visualizar e executar oprograma em funcionamento neste notebook do DataLab!
No aprendizado de máquina, os hiperparâmetros controlam o processo de treinamento. A seguir, explico alguns dos hiperparâmetros importantes usados no PPO:
PPO_STEPS. Em ambientes complexos, a execução da passagem direta várias vezes é computacionalmente cara. Uma alternativa mais eficiente é executar novamente cada lote algumas vezes. Normalmente, recomenda-se que você use um valor entre 5 e 10. N_TRIALS. Quando esse valor é definido como mais alto, o treinamento é mais demorado porque a política precisa atingir a recompensa limite em mais episódios. Isso também resulta em uma política mais robusta, embora seja computacionalmente mais cara. Observe que a PPO é uma política estocástica, e haverá episódios em que o agente não ultrapassará o limite. Portanto, se o valor de N_TRIALS for muito alto, o treinamento poderá não terminar.A otimização do desempenho dos algoritmos de PPO de treinamento envolve tentativa e erro e experimentos com diferentes valores de hiperparâmetro. No entanto, existem algumas diretrizes gerais:
Depois de explicar os conceitos da PPO e os detalhes da implementação, vamos discutir os desafios e as práticas recomendadas.
Embora a PPO seja amplamente usada, você precisa estar ciente dos possíveis desafios para resolver problemas do mundo real usando essa técnica com sucesso. Alguns desses desafios são:
Para que você obtenha bons resultados usando o PPO, recomendo algumas práticas recomendadas, como
PPO_STEPS. Neste artigo, discutimos a PPO como uma forma de resolver problemas de RL. Em seguida, detalhamos as etapas para implementar o PPO usando o PyTorch. Por fim, apresentamos algumas dicas de desempenho e práticas recomendadas para PPO.
A melhor maneira de aprender é você mesmo implementar o código. Você também pode modificar o código para trabalhar com outros ambientes de controle clássicos no Gym. Para saber como implementar agentes de RL usando Python e o Gymnasium da OpenAI, siga o curso Reinforcement Learning with Gymnasium in Python!
Saiba mais sobre aprendizado de máquina com estes cursos!
Curso
Curso
Curso
Tutorial
Bex Tuychiev
Tutorial
Kurtis Pykes
Tutorial
Abid Ali Awan
Tutorial
Zoumana Keita
Tutorial
Moez Ali
Tutorial