Course
Machine Learning with Tree-Based Models in Python
5 hr
116.3K
Before implementing PPO, we need to install the prerequisite software libraries and choose a suitable environment to apply the policy.
We need to install the following software:
numpy (for mathematical and statistical functions) and matplotlib (for plotting graphs).gym sometimes changes through the upgrade process, in this example, we freeze its version to 0.25.2. To install on a server or local machine, run:
$ pip install torch numpy matplotlib gym==0.25.2To install using a Notebook like Google Colab or DataLab, use:
!pip install torch numpy matplotlib gym==0.25.2Use OpenAI Gym to create two instances (one for training and another for testing) of the CartPole environment:
env_train = gym.make('CartPole-v1')
env_test = gym.make('CartPole-v1')Now, let’s implement PPO using PyTorch.
As explained earlier, PPO is implemented as an actor-critic model. The actor implements the policy, and the critic predicts its estimated value. Both actor and critic neural networks take the same input—the state at each timestep. Thus, the actor and critic models can share a common neural network, which is referred to as the backbone architecture. The actor and critic can extend the backbone architecture with additional layers.
The following steps describe the backbone network:
The code below implements the backbone:
class BackboneNetwork(nn.Module):
def __init__(self, in_features, hidden_dimensions, out_features, dropout):
super().__init__()
self.layer1 = nn.Linear(in_features, hidden_dimensions)
self.layer2 = nn.Linear(hidden_dimensions, hidden_dimensions)
self.layer3 = nn.Linear(hidden_dimensions, out_features)
self.dropout = nn.Dropout(dropout)
def forward(self, x):
x = self.layer1(x)
x = f.relu(x)
x = self.dropout(x)
x = self.layer2(x)
x = f.relu(x)
x = self.dropout(x)
x = self.layer3(x)
return xNow, we can use this network to define the actor-critic class, ActorCritic. The actor models the policy and predicts the action. The critic models the value function and predicts the value. They both take the state as input.
class ActorCritic(nn.Module):
def __init__(self, actor, critic):
super().__init__()
self.actor = actor
self.critic = critic
def forward(self, state):
action_pred = self.actor(state)
value_pred = self.critic(state)
return action_pred, value_predWe’ll use the networks defined above to create an actor and a critic. Then, we will create an agent, including the actor and the critic.
Before creating the agent, initialize the parameters of the network:
The following code shows how to declare the actor and critic networks based on the backbone network:
def create_agent(hidden_dimensions, dropout):
INPUT_FEATURES = env_train.observation_space.shape[0]
HIDDEN_DIMENSIONS = hidden_dimensions
ACTOR_OUTPUT_FEATURES = env_train.action_space.n
CRITIC_OUTPUT_FEATURES = 1
DROPOUT = dropout
actor = BackboneNetwork(
INPUT_FEATURES, HIDDEN_DIMENSIONS, ACTOR_OUTPUT_FEATURES, DROPOUT)
critic = BackboneNetwork(
INPUT_FEATURES, HIDDEN_DIMENSIONS, CRITIC_OUTPUT_FEATURES, DROPOUT)
agent = ActorCritic(actor, critic)
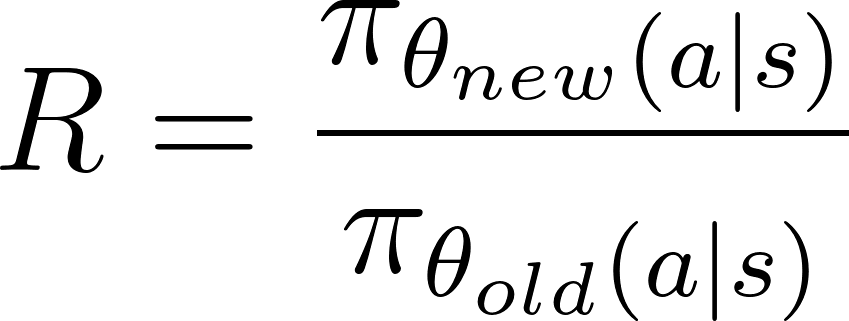
return agentThe environment gives a reward going from each step to the next, depending on the agent’s action. The reward, R, is expressed as:
![]()
The return is defined as the accumulated value of expected future rewards. Rewards from timesteps that are farther away in the future are less valuable than immediate rewards. Thus, the return is commonly calculated as the discounted return, G, defined as:
![]()
In this tutorial (and many other references), return refers to the discounted return.
To compute the return:
The function calculate_returns() performs these computations, as shown below:
def calculate_returns(rewards, discount_factor):
returns = []
cumulative_reward = 0
for r in reversed(rewards):
cumulative_reward = r + cumulative_reward * discount_factor
returns.insert(0, cumulative_reward)
returns = torch.tensor(returns)
# normalize the return
returns = (returns - returns.mean()) / returns.std()
return returnsThe advantage is calculated as the difference between the value predicted by the critic and the expected return from the actions chosen by the actor according to the policy. For a given action, the advantage expresses the benefit of taking that specific action over an arbitrary (average) action.
In the original PPO paper (equation 10), the advantage, looking forward till timestep T is expressed as:
![]()
While coding the algorithm, the constraint of looking forward until a set number of timesteps is enforced via the batch size. So, the above equation can be simplified as the difference between the value and the expected returns. The expected returns are quantified in the state-action value function, Q.
Thus, the simplified formula below expresses the advantage of choosing:
This is expressed as:
![]()
OpenAI also uses this formula to implement RL. The calculate_advantages() function shown below calculates the advantage:
def calculate_advantages(returns, values):
advantages = returns - values
# Normalize the advantage
advantages = (advantages - advantages.mean()) / advantages.std()
return advantagesThe policy loss would be the standard policy gradient loss without special techniques like PPO. The standard policy gradient loss is calculated as the product of:
The standard policy gradient loss cannot make corrections for abrupt policy changes. The surrogate loss modifies the standard loss to restrict the amount the policy can change in each iteration. It is the minimum of two quantities:
For the optimization process, the surrogate loss is used as a proxy for the actual loss.
The policy ratio, R, is the difference between the new and old policies and is given as the ratio of the log probabilities of the policy under the new and old parameters:
![]()
The clipped policy ratio, R', is constrained such that:
![]()
Given the advantage, At, as shown in the previous section, and the policy ratio, as shown above, the surrogate loss is calculated as:
The code below shows how to implement the clipping mechanism and the surrogate loss.
def calculate_surrogate_loss(
actions_log_probability_old,
actions_log_probability_new,
epsilon,
advantages):
advantages = advantages.detach()
policy_ratio = (
actions_log_probability_new - actions_log_probability_old
).exp()
surrogate_loss_1 = policy_ratio * advantages
surrogate_loss_2 = torch.clamp(
policy_ratio, min=1.0-epsilon, max=1.0+epsilon
) * advantages
surrogate_loss = torch.min(surrogate_loss_1, surrogate_loss_2)
return surrogate_lossNow, let’s train the agent.
We are now ready to calculate the policy and value losses:
Both the losses, as computed above, are tensors. Gradient descent is based on scalar values. To get a single scalar value representing the loss, use the .sum() function to sum the tensor elements. The function below shows how to do this:
def calculate_losses(
surrogate_loss, entropy, entropy_coefficient, returns, value_pred):
entropy_bonus = entropy_coefficient * entropy
policy_loss = -(surrogate_loss + entropy_bonus).sum()
value_loss = f.smooth_l1_loss(returns, value_pred).sum()
return policy_loss, value_lossBefore starting the training process, create a set of buffers as empty arrays. The training algorithm will use these buffers to store information about the agent’s actions, the environment’s states, and the rewards in each time step. The function below initializes these buffers:
def init_training():
states = []
actions = []
actions_log_probability = []
values = []
rewards = []
done = False
episode_reward = 0
return states, actions, actions_log_probability, values, rewards, done, episode_rewardEach training iteration runs the agent with the policy parameters for that iteration. The agent interacts with the environment in timesteps in a loop until it reaches a terminal condition.
After each timestep, the agent’s action, reward, and value are appended to the respective buffers. When the episode terminates, the function returns the updated set of buffers, which summarize the episode's results.
Before running the training loop:
agent.train(). env.reset(). This is the starting state for this training iteration. The following steps explain what happens in each timestep in the training loop:
dist.sample() function does this. env.step() function to pass this action to the environment to simulate the environment’s response for this timestep. Based on the agent’s action, the environment generates:done (this indicates whether the environment has reached a terminal state)The training episode terminates when the env.step() function returns true for the boolean return value of done.
After the episode has terminated, use the accumulated values from each timestep to calculate the cumulative returns from this episode by adding the rewards from each timestep. We use the calculate_returns() function described earlier to do this. This function’s inputs are the discount factor and the buffer containing the rewards from each timestep. We use these returns and the accumulated values from each timestep to calculate the advantages using the calculate_advantages() function.
The following Python function shows how to implement these steps:
def forward_pass(env, agent, optimizer, discount_factor):
states, actions, actions_log_probability, values, rewards, done, episode_reward = init_training()
state = env.reset()
agent.train()
while not done:
state = torch.FloatTensor(state).unsqueeze(0)
states.append(state)
action_pred, value_pred = agent(state)
action_prob = f.softmax(action_pred, dim=-1)
dist = distributions.Categorical(action_prob)
action = dist.sample()
log_prob_action = dist.log_prob(action)
state, reward, done, _ = env.step(action.item())
actions.append(action)
actions_log_probability.append(log_prob_action)
values.append(value_pred)
rewards.append(reward)
episode_reward += reward
states = torch.cat(states)
actions = torch.cat(actions)
actions_log_probability = torch.cat(actions_log_probability)
values = torch.cat(values).squeeze(-1)
returns = calculate_returns(rewards, discount_factor)
advantages = calculate_advantages(returns, values)
return episode_reward, states, actions, actions_log_probability, advantages, returnsEach training iteration runs the model through a complete episode consisting of many timesteps (until it reaches a terminal condition). In each timestep, we store the policy parameters, the agent’s action, the returns, and the advantages. After each iteration, we update the model based on the policy’s performance through all the timesteps in that iteration.
The maximum number of timesteps in the CartPole environment is 500. In more complex environments, there are more timesteps, even millions. In such cases, the training results dataset must be split into batches. The number of timesteps in each batch is called the optimization batch size.
Thus, the steps to update the model parameters are:
.backward() separately on the policy and value losses. This updates the gradients on the loss functions. .step() on the optimizer to update the policy parameters. In this case, we use the Adam optimizer to balance speed and robustness. PPO_STEPS. Repeating the backward pass on each batch is computationally efficient because it effectively increases the size of the training dataset without having to run additional forward passes. The number of environment steps in each alternation between sampling and optimization is called the iteration batch size. The code below implements these steps:
def update_policy(
agent,
states,
actions,
actions_log_probability_old,
advantages,
returns,
optimizer,
ppo_steps,
epsilon,
entropy_coefficient):
BATCH_SIZE = 128
total_policy_loss = 0
total_value_loss = 0
actions_log_probability_old = actions_log_probability_old.detach()
actions = actions.detach()
training_results_dataset = TensorDataset(
states,
actions,
actions_log_probability_old,
advantages,
returns)
batch_dataset = DataLoader(
training_results_dataset,
batch_size=BATCH_SIZE,
shuffle=False)
for _ in range(ppo_steps):
for batch_idx, (states, actions, actions_log_probability_old, advantages, returns) in enumerate(batch_dataset):
# get new log prob of actions for all input states
action_pred, value_pred = agent(states)
value_pred = value_pred.squeeze(-1)
action_prob = f.softmax(action_pred, dim=-1)
probability_distribution_new = distributions.Categorical(
action_prob)
entropy = probability_distribution_new.entropy()
# estimate new log probabilities using old actions
actions_log_probability_new = probability_distribution_new.log_prob(actions)
surrogate_loss = calculate_surrogate_loss(
actions_log_probability_old,
actions_log_probability_new,
epsilon,
advantages)
policy_loss, value_loss = calculate_losses(
surrogate_loss,
entropy,
entropy_coefficient,
returns,
value_pred)
optimizer.zero_grad()
policy_loss.backward()
value_loss.backward()
optimizer.step()
total_policy_loss += policy_loss.item()
total_value_loss += value_loss.item()
return total_policy_loss / ppo_steps, total_value_loss / ppo_stepsLet’s finally run the PPO agent.
To evaluate the agent’s performance, create a fresh environment and calculate the cumulative rewards from running the agent in this new environment. You need to set the agent to evaluate mode using the .eval() function. The steps are the same as for the training loop. The code snippet below implements the evaluation function:
def evaluate(env, agent):
agent.eval()
rewards = []
done = False
episode_reward = 0
state = env.reset()
while not done:
state = torch.FloatTensor(state).unsqueeze(0)
with torch.no_grad():
action_pred, _ = agent(state)
action_prob = f.softmax(action_pred, dim=-1)
action = torch.argmax(action_prob, dim=-1)
state, reward, done, _ = env.step(action.item())
episode_reward += reward
return episode_rewardWe will use the Matplotlib library to visualize the progress of the training process. The function below shows how to plot the rewards from both the training and the testing loops:
def plot_train_rewards(train_rewards, reward_threshold):
plt.figure(figsize=(12, 8))
plt.plot(train_rewards, label='Training Reward')
plt.xlabel('Episode', fontsize=20)
plt.ylabel('Training Reward', fontsize=20)
plt.hlines(reward_threshold, 0, len(train_rewards), color='y')
plt.legend(loc='lower right')
plt.grid()
plt.show()def plot_test_rewards(test_rewards, reward_threshold):
plt.figure(figsize=(12, 8))
plt.plot(test_rewards, label='Testing Reward')
plt.xlabel('Episode', fontsize=20)
plt.ylabel('Testing Reward', fontsize=20)
plt.hlines(reward_threshold, 0, len(test_rewards), color='y')
plt.legend(loc='lower right')
plt.grid()
plt.show()In the example plots below, we show the training and testing rewards, obtained by applying the policy in the training and testing environments respectively. Note that the shape of these plots will appear different every time you run the code. This is because of the randomness inherent to the training process.
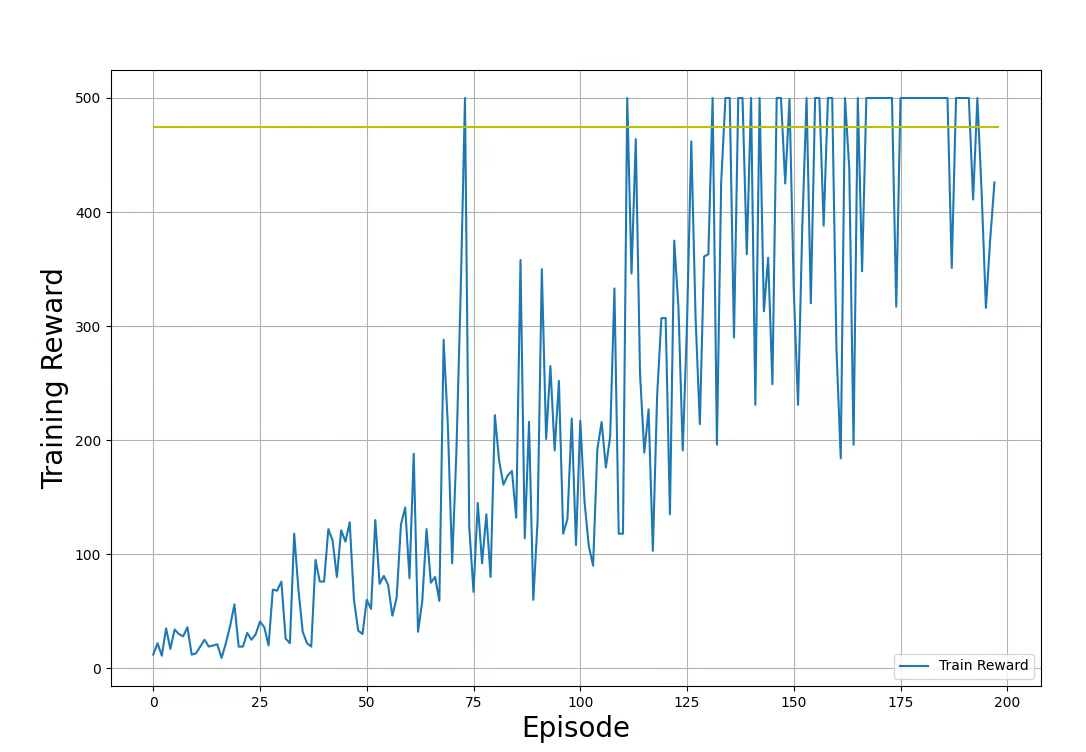
Training rewards (obtained by applying the policy in the training environment). Image by Author.
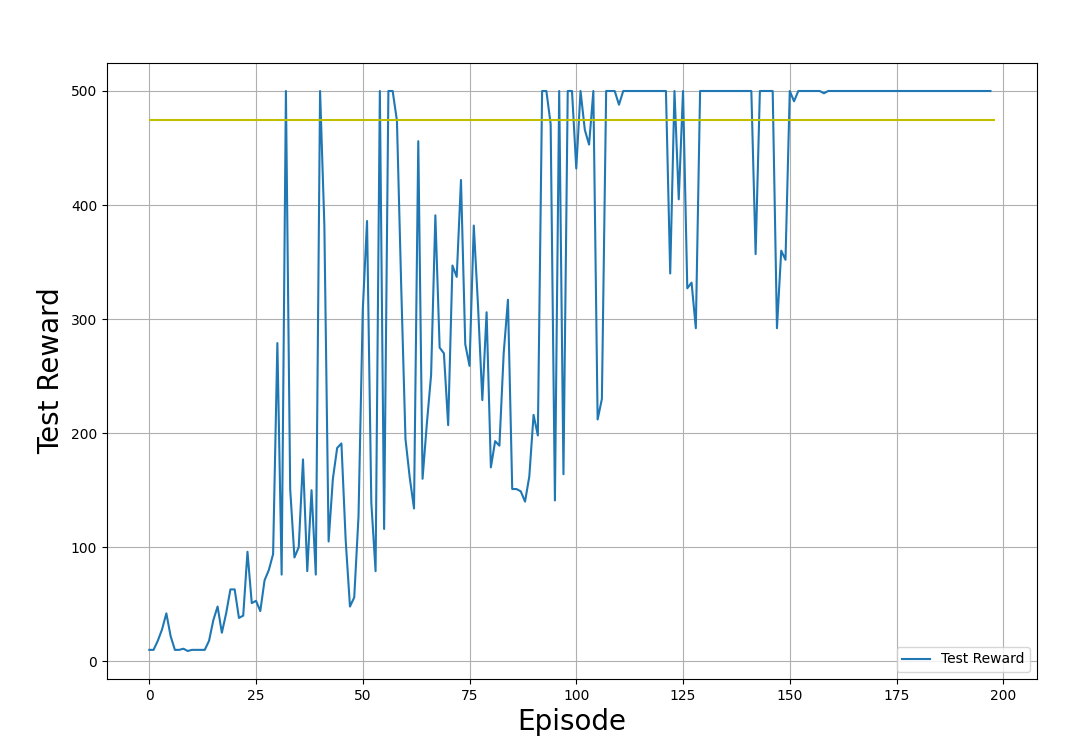
Testing rewards (obtained by applying the policy in the test environment). Image by Author.
In the output graphs shown above, observe the progress of the training process:
Similarly, you can plot the value and policy losses through the iterations:
def plot_losses(policy_losses, value_losses):
plt.figure(figsize=(12, 8))
plt.plot(value_losses, label='Value Losses')
plt.plot(policy_losses, label='Policy Losses')
plt.xlabel('Episode', fontsize=20)
plt.ylabel('Loss', fontsize=20)
plt.legend(loc='lower right')
plt.grid()
plt.show()The example plot below shows the losses tracked through the training episodes:
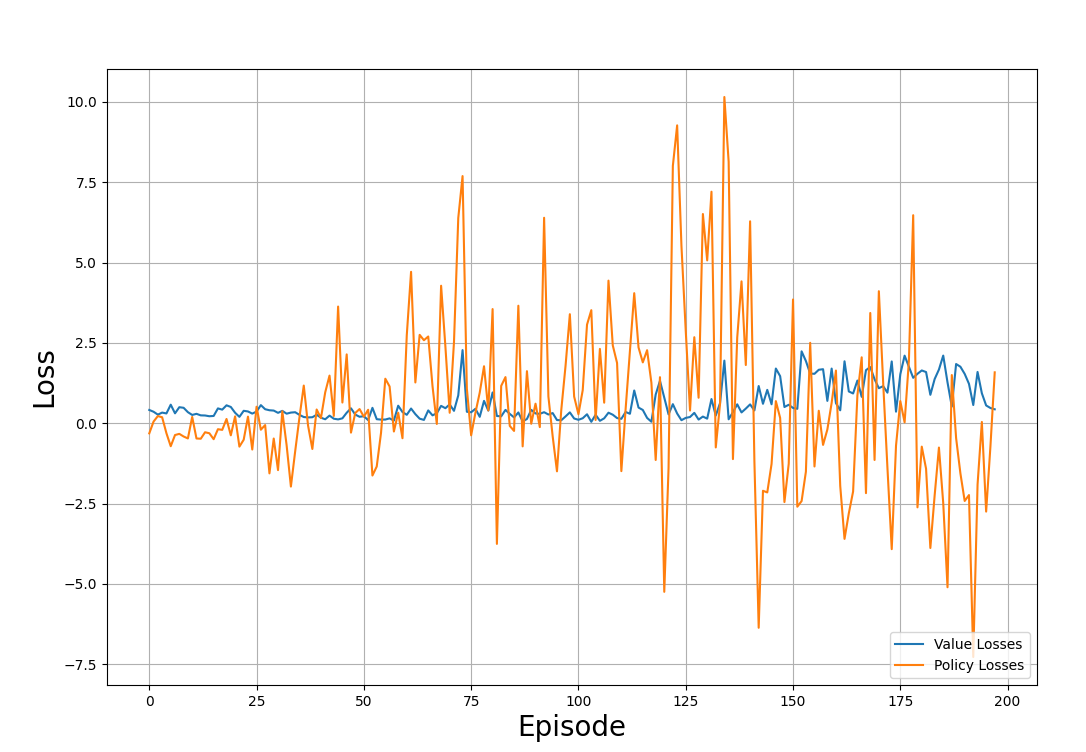
Value and policy losses through the training process. Image by Author
Observe the plot and notice:
You now have all the components to train the agent using PPO. To put it all together, you need to:
create_agent() function.forward_pass() and the update_policy() functions. evaluate() function. The code below shows how to declare a function which does this in Python:
def run_ppo():
MAX_EPISODES = 500
DISCOUNT_FACTOR = 0.99
REWARD_THRESHOLD = 475
PRINT_INTERVAL = 10
PPO_STEPS = 8
N_TRIALS = 100
EPSILON = 0.2
ENTROPY_COEFFICIENT = 0.01
HIDDEN_DIMENSIONS = 64
DROPOUT = 0.2
LEARNING_RATE = 0.001
train_rewards = []
test_rewards = []
policy_losses = []
value_losses = []
agent = create_agent(HIDDEN_DIMENSIONS, DROPOUT)
optimizer = optim.Adam(agent.parameters(), lr=LEARNING_RATE)
for episode in range(1, MAX_EPISODES+1):
train_reward, states, actions, actions_log_probability, advantages, returns = forward_pass(
env_train,
agent,
optimizer,
DISCOUNT_FACTOR)
policy_loss, value_loss = update_policy(
agent,
states,
actions,
actions_log_probability,
advantages,
returns,
optimizer,
PPO_STEPS,
EPSILON,
ENTROPY_COEFFICIENT)
test_reward = evaluate(env_test, agent)
policy_losses.append(policy_loss)
value_losses.append(value_loss)
train_rewards.append(train_reward)
test_rewards.append(test_reward)
mean_train_rewards = np.mean(train_rewards[-N_TRIALS:])
mean_test_rewards = np.mean(test_rewards[-N_TRIALS:])
mean_abs_policy_loss = np.mean(np.abs(policy_losses[-N_TRIALS:]))
mean_abs_value_loss = np.mean(np.abs(value_losses[-N_TRIALS:]))
if episode % PRINT_INTERVAL == 0:
print(f'Episode: {episode:3} | \
Mean Train Rewards: {mean_train_rewards:3.1f} \
| Mean Test Rewards: {mean_test_rewards:3.1f} \
| Mean Abs Policy Loss: {mean_abs_policy_loss:2.2f} \
| Mean Abs Value Loss: {mean_abs_value_loss:2.2f}')
if mean_test_rewards >= REWARD_THRESHOLD:
print(f'Reached reward threshold in {episode} episodes')
break
plot_train_rewards(train_rewards, REWARD_THRESHOLD)
plot_test_rewards(test_rewards, REWARD_THRESHOLD)
plot_losses(policy_losses, value_losses)Run the program:
run_ppo()The output should resemble the sample below:
Episode: 10 | Mean Train Rewards: 22.3 | Mean Test Rewards: 30.4 | Mean Abs Policy Loss: 0.37 | Mean Abs Value Loss: 0.39
Episode: 20 | Mean Train Rewards: 38.6 | Mean Test Rewards: 69.8 | Mean Abs Policy Loss: 0.46 | Mean Abs Value Loss: 0.37
.
.
.
Episode: 100 | Mean Train Rewards: 289.5 | Mean Test Rewards: 427.3 | Mean Abs Policy Loss: 1.73 | Mean Abs Value Loss: 0.21
Episode: 110 | Mean Train Rewards: 357.7 | Mean Test Rewards: 461.4 | Mean Abs Policy Loss: 1.86 | Mean Abs Value Loss: 0.22
Reached reward threshold in 116 episodesYou can view and run the working program on this DataLab notebook!
In machine learning, hyperparameters control the training process. Below, I explain some of the important hyperparameters used in PPO:
PPO_STEPS. In complex environments, running the forward pass many times is computationally expensive. A more efficient alternative is to re-run each batch a few times. It is typically recommended to use a value between 5 and 10. N_TRIALS. When this is set to a higher value, the training takes longer because the policy has to achieve the threshold reward over more episodes. It also results in a more robust policy while being computationally more expensive. Note that PPO is a stochastic policy, and there will be episodes when the agent doesn’t cross the threshold. So, if the value of N_TRIALS is too high, your training may not terminate.Optimizing the performance of training PPO algorithms involves trial and error and experimenting with different hyperparameter values. However, there are some broad guidelines:
After explaining PPO's concepts and implementation details, let’s discuss the challenges and best practices.
Even though PPO is widely used, you need to be aware of potential challenges to solve real-world problems using this technique successfully. Some such challenges are:
To get good results using PPO, I recommend some best practices, such as:
PPO_STEPS. In this article, we discussed PPO as a way to solve RL problems. We then detailed the steps to implement PPO using PyTorch. Lastly, we presented some performance tips and best practices for PPO.
The best way to learn is to implement the code yourself. You can also modify the code to work with other classic control environments in Gym. To learn how to implement RL agents using Python and OpenAI’s Gymnasium, follow the course Reinforcement Learning with Gymnasium in Python!
Learn more about machine learning with these courses!
Course
Course
Course
Tutorial
Arun Nanda
Tutorial
Bex Tuychiev
Tutorial
Bex Tuychiev
Tutorial
Arun Nanda
Tutorial
Moez Ali
Tutorial
Kurtis Pykes