Track
Deep Learning w Pythonie
18 godz.
Wizja komputerowa od zawsze opierała się na wyraźnym rozdziale między modelami, które tworzą obrazy, a modelami, które je rozumieją. Ramy generatywne były głównym źródłem syntezy, podczas gdy architektury dyskryminacyjne koncentrowały się na klasyfikacji, segmentacji lub regresji głębi. Standardowym podejściem do każdego nowego zadania wizyjnego było wybranie architektury, dołączenie głowicy specyficznej dla zadania i dostrajanie na oznaczonych danych.
Założenie to podważa Vision Banana z Google DeepMind. Artykuł dowodzi, że generatory obrazów nauczyły się już wszystkiego, czego potrzebuje uogólniony model wizyjny, w tym segmentacji, głębi, normalnych powierzchni i nie tylko. Zdaniem autorów brakuje jedynie cienkiej warstwy dostrajania instrukcjami, aby te ukryte możliwości stały się mierzalne w benchmarkach.
W tym wpisie zacznę od wyjaśnienia, czym właściwie jest Vision Banana i dlaczego artykuł przykuł uwagę branży, a następnie omówię działanie modelu. Na koniec wskażę, co działa, co nie działa i jakie wnioski powinni wyciągnąć praktycy. Po drodze poruszę pytania, które miałem podczas lektury pracy — inni czytelnicy zapewne mają podobne.
Uwaga: samo Vision Banana nie jest publicznie dostępne. Opublikowano artykuł oraz stronę projektu. Model bazowy powstał na Nano Banana Pro i jest dostępny przez API Gemini oraz Google AI Studio.
Vision Banana to model badawczy Google DeepMind, zbudowany przez wzięcie Nano Banana Pro (generatora tekst–obraz) i zastosowanie lekkiego dostrajania instrukcjami na mieszance jego oryginalnych danych treningowych z niewielką ilością danych do zadań wizji komputerowej.
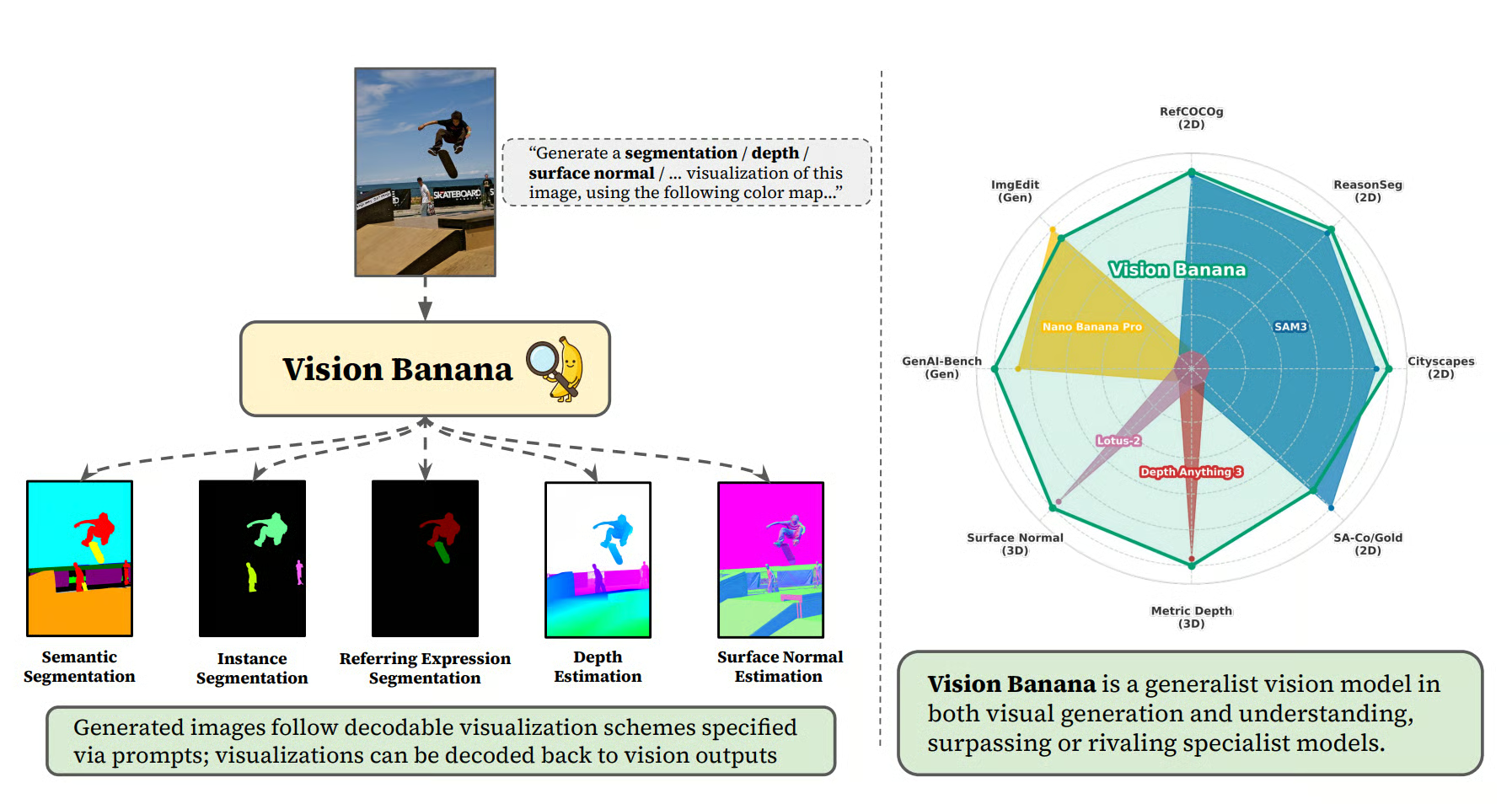
Rysunek 1: Ukryte zdolności rozumienia wizualnego u generatorów obrazów dzięki dostrajaniu instrukcjami Nano Banana Pro (Źródło)
Przepis jest następujący:
Cała metodyka treningowa nie wymaga nowej architektury, niestandardowych głowic, strat pomocniczych ani wyspecjalizowanych dekoderów.
Powstały model:
Wszystko to osiągnięto w rygorystycznym protokole transferu zero-shot, gwarantującym, że model nigdy nie widział zbiorów treningowych benchmarków, na których jest oceniany.
Uczenie reprezentacji w wizji testowało przez lata wiele celów wstępnego treningu. Do najczęstszych należą:
Co istotne, żaden z nich nie jest generatywny. Generowanie obrazów historycznie traktowano jako zdolność „zstępującą”, a nie fundament rozumienia. Wczesne próby generatywnego pretreningu (iGPT, LVM) konsekwentnie odstawały od metod kontrastowych w benchmarkach jakości reprezentacji.
Skalowanie generatywnych celów autoregresyjnych poprzez przewidywanie kolejnego tokena katalizowało pojawienie się zdolności uogólnionych w trybie zero-shot w modelach takich jak GPT-3. Złożone zachowania „zstępujące” okazały się ukryte w wysokowymiarowej przestrzeni wag, a następnie wydobywane poprzez lekkie nadzorowane dostrajanie i dopasowanie instrukcyjne. Przykłady obejmują:
Vision Banana przekonuje, że w wizji jesteśmy w tym samym momencie. Artykuł wprost rysuje analogię między pretreningiem generowania obrazów a pretreningiem modeli językowych oraz między dostrajaniem instrukcjami a etapem dopasowania.
Jeśli analogia się utrzyma, przestaniemy budować potoki specyficzne dla zadań i potraktujemy jeden duży generator obrazów jako warstwę bazową, określając zadania za pomocą promptów.
Mechanizm jest prosty: każde zadanie wizyjne zostaje przedefiniowane jako „wygeneruj obraz RGB o tych właściwościach”, a w czasie dekodowania deterministycznie przekształca się ten obraz RGB z powrotem w predykcje zadania.
Mapowanie dla poszczególnych zadań wygląda tak:
Podaj modelowi przypisania kolorów dla klas w promptcie, a przy dekodowaniu zgrupuj piksele do najbliższego określonego koloru. Słownictwo jest takie, jakie wskaże prompt; z założenia jest to słownik otwarty.
Łatwiej to zrozumieć na przykładzie. Oto prompt z artykułu:
This image is a per-pixel class labeling of the input. The macaron cakes are represented by (255, 255, 0). The round plates are represented by (255, 192, 128). The slice cakes are depicted in (64, 192, 64). The flowers are shown in (128, 0, 64). The tongs are (255, 0, 192).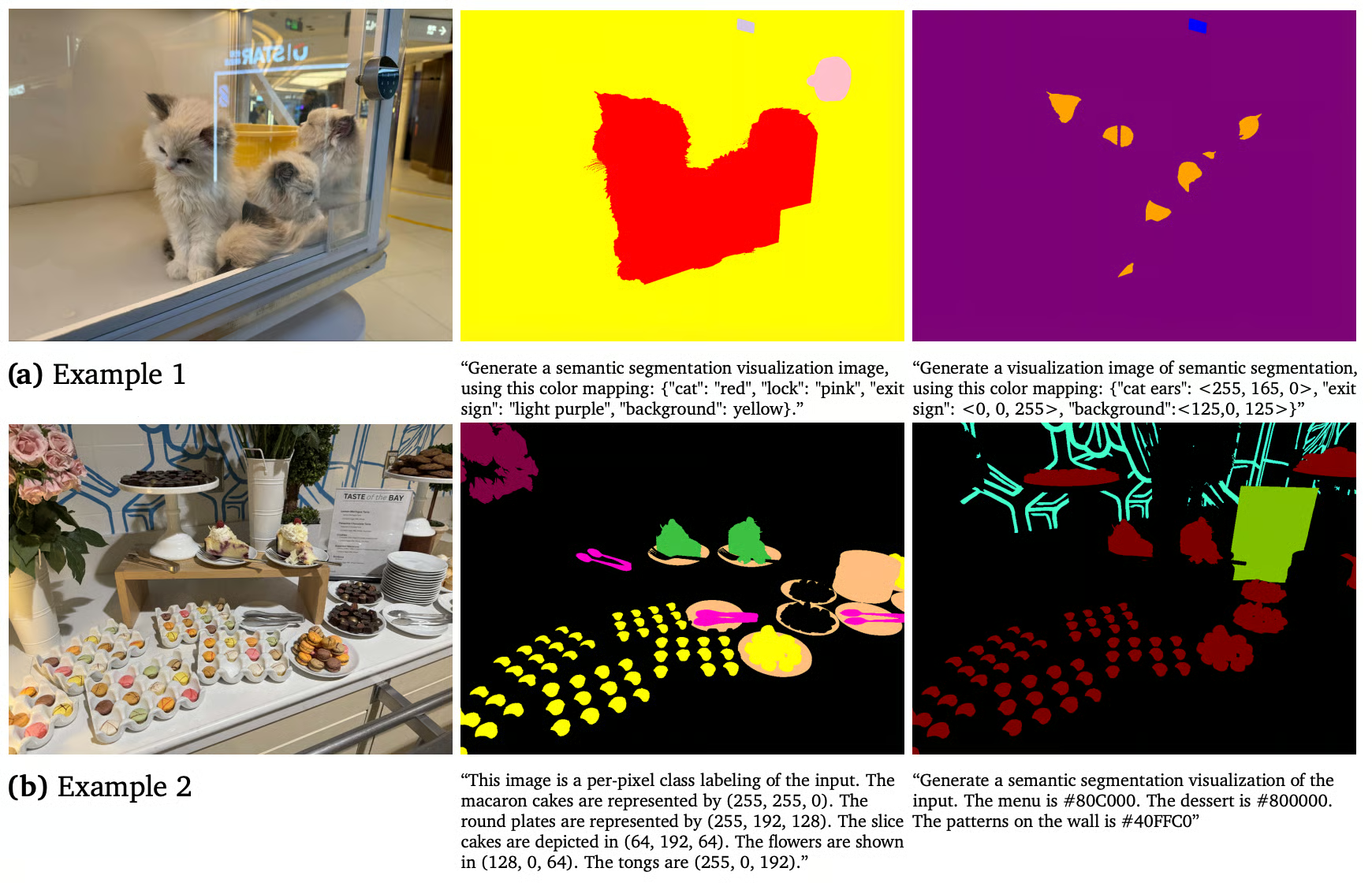
Rysunek 2: Segmentacja semantyczna (Źródło)
Segmentacja instancji jest trudniejsza niż semantyczna, ponieważ liczba instancji nie jest znana z góry. Nie można więc z góry przypisać kolorów.
Rozwiązaniem Vision Banana jest wykonywanie wnioskowania po jednej klasie, pozwolenie modelowi na dynamiczne przypisywanie odrębnych kolorów różnym instancjom, a następnie klastrowanie pikseli do modów kolorów podczas dekodowania.
Vision Banana może przyjąć prompt z opisem w języku naturalnym tego, co segmentować, i zwrócić maskę. Oto przykładowy prompt z artykułu:
A segmentation map image. The stretching cat is rendered in green, the cat that is cleaning itself is in cyan.Tu błyszczy multimodalne rozumowanie wbudowane w generatywny pretrening. Modele dyskryminacyjne mają trudności z wyrażeniami referencyjnymi, bo zadanie wymaga łącznego rozumowania językowego i wizualnego. Modele generatywne uczone na miliardach par podpis–obraz radzą sobie z tym naturalnie.
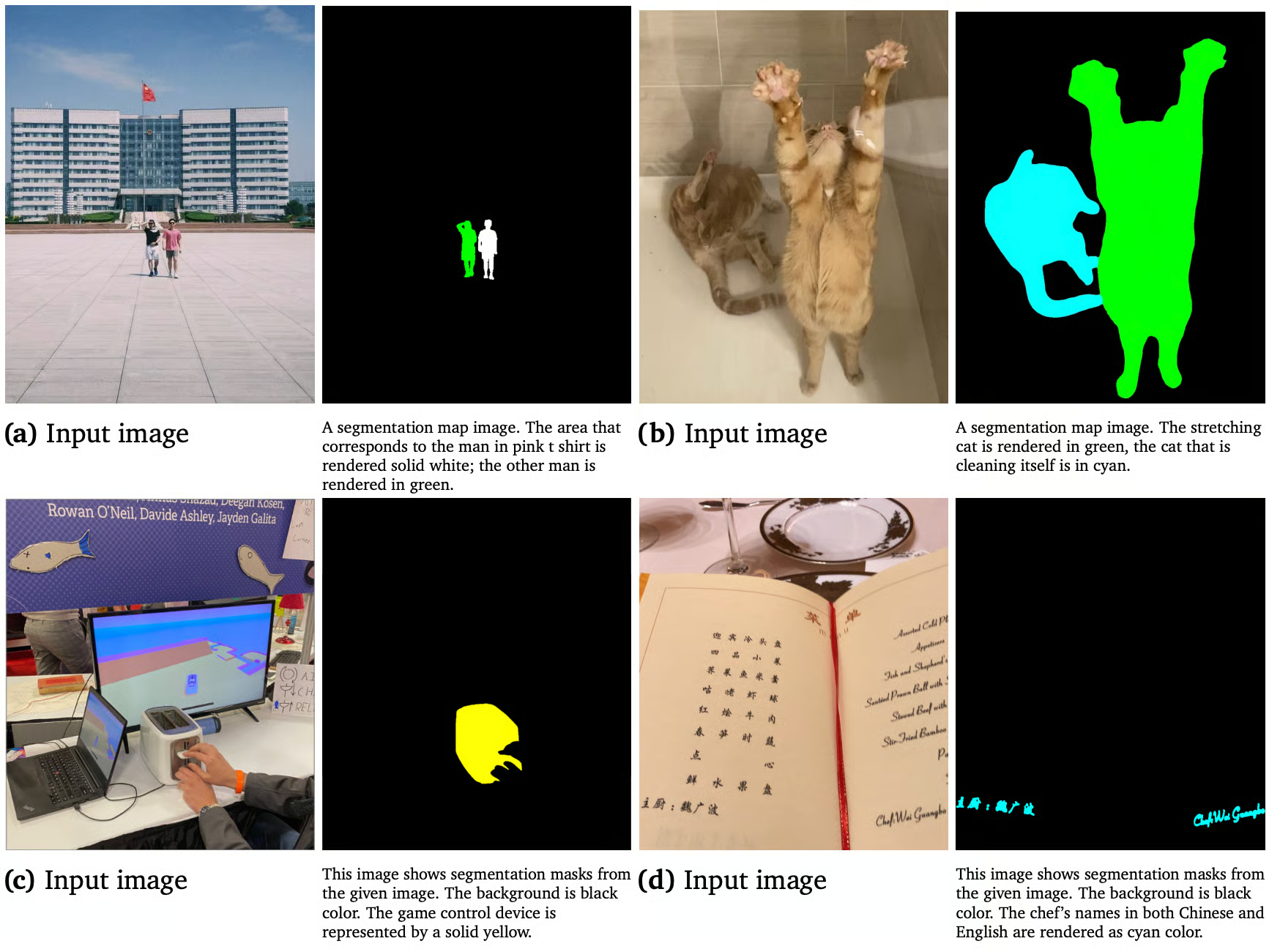
Rysunek 3: Vision Banana rozumie prompt w języku naturalnym i potrafi o nim rozumować (Źródło)
Zarówno głębia, jak i normalne powierzchni są rzutowane do przestrzeni RGB poprzez bijektywne odwzorowania, co zapewnia zachowanie ukrytych własności geometrycznych bez utraty informacji podczas transformacji. W kolejnej sekcji rozbierzemy na czynniki pierwsze specyfikę kodowania głębi na RGB.
Ten ujednolicony paradygmat wnioskowania traktuje każde zadanie wizji komputerowej jako deterministyczny problem generowania obrazu. Utrzymując spójny interfejs RGB w całym potoku, model unika gałęzi architektonicznych specyficznych dla zadań, w pełni polegając na warunkowaniu przez prompt do zdefiniowania semantyki wyjścia.
Przyjrzyjmy się teraz dokładniej głębi. To miejsce, gdzie całe podejście może najłatwiej się posypać.
Jeśli kodowanie nie jest bijektywne, nie da się odzyskać odległości metrycznych podczas dekodowania, a wraz z tym upada cała teza „generowania obrazu jako uniwersalnego interfejsu”. Warto to zrozumieć, bo mówi, czy podejście jest zasadnicze, czy „na skróty”.
Problem polega na tym, że wartości głębi to nieograniczone liczby rzeczywiste w [0, ∞), podczas gdy RGB jest ograniczone do [0, 1]. Aby więc użyć „wygeneruj mapę głębi” jako sygnału treningowego, potrzebne jest odwzorowanie bijektywne, w którym każdej metrycznej głębi odpowiada dokładnie jedna wartość RGB, a przy dekodowaniu można ją odwrócić z powrotem do metrów.
Podejście Vision Banana ma dwa etapy:
Autorzy używają transformacji potęgowej Barrona (2025) z parametrem kształtu λ = -3, co daje większą rozdzielczość dla obszarów bliskiego pola niż dalekiego. Obiekt w odległości 2 metrów otrzymuje większą precyzję niż ten w odległości 200 metrów. To odpowiada większości zastosowań, które skupiają się na obiektach „uchwytnych”, a nie odległych.
Następnie interpolują wzdłuż odcinkowej ścieżki liniowej, która śledzi krawędzie sześcianu RGB — zasadniczo pierwszą iterację 3D krzywej Hilberta. Daje to płynne, perceptualnie sensowne przejścia kolorów bez niejednoznaczności co do tego, jaki kolor odpowiada jakiej głębokości.
Ponieważ oba etapy są ściśle odwracalne, ich złożenie jest bijekcją. Trenują więc na zakodowanej w RGB prawdzie etykiet, a podczas wnioskowania rzutują przewidziane RGB na najbliższą krawędź sześcianu i odwracają z powrotem do metrów.
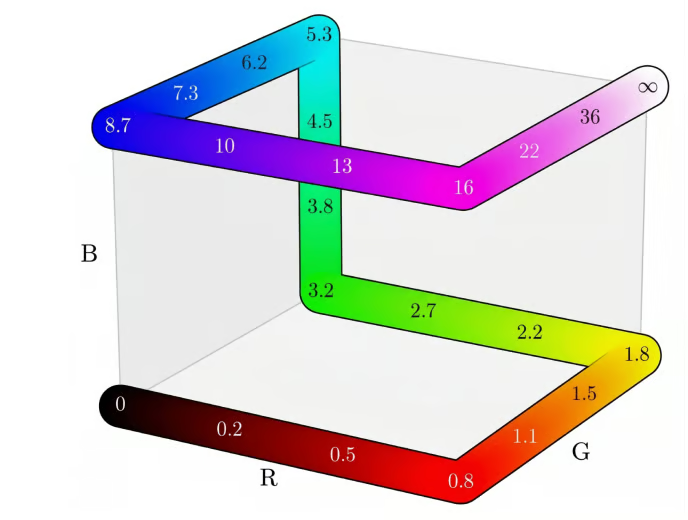
Rysunek 4: Wizualizacja naszej bijekcji między skalarnymi odległościami metrycznymi 𝑑 ≥ 0 a wartościami kolorów RGB (Źródło)
Dla odporności trening uzupełniono alternatywnymi mapami kolorów, jak Plasma, Inferno, Viridis i skala szarości, aby model radził sobie z dowolnym stylem wizualizacji, o jaki poprosisz w promptcie.
Normalne powierzchni są łatwiejsze, ponieważ już są wektorami jednostkowymi o składowych w [-1, 1], które bezpośrednio mapują się na RGB w standardowej konwencji przestrzeni kamery (+x w prawo, +y w górę, +z na zewnątrz płaszczyzny obrazu). Jasna zieleń oznacza zwrócone ku górze, czerwonawy róż — w lewo, a jasny niebiesko–fioletowy — w kierunku kamery. Bez potrzeby zniekształceń.
Uwaga: Vision Banana nie używa parametrów wewnętrznych kamery nigdzie — ani w treningu, ani we wnioskowaniu. Większość metod SOTA głębi (Depth Anything V3, MoGe-2, UniK3D, DepthLM) używa intrinsics w pewnym momencie, bo pomagają usuwać niejednoznaczność skali monokularnej.
To, że Vision Banana wnioskuje skalę absolutną wyłącznie z priorytetów wizualnych, a mimo to wygrywa, jest najsilniejszym dowodem w artykule, że generatywny pretrening wykonuje pracę geometryczną, a nie tylko dopasowuje wzorce wizualizacji widziane podczas treningu.
Najczyściej widać różnice, porównując oba paradygmaty na jednym zadaniu. Porównajmy estymację głębi podejściem specjalistycznym (Marigold, Lotus, Depth Anything V3) i Vision Banana.
Oba paradygmaty wytwarzają różne artefakty. Marigold to narzędzie wyspecjalizowane, podczas gdy Vision Banana to uogólniony model, którego szerokość kompetencji wynika z jednego kroku treningowego.
Różnice przekładają się na to, jak model jest używany w praktyce:
|
Aspekt |
Specjalista (w stylu Marigold) |
Vision Banana |
|
Format wyjścia |
Tensor specyficzny dla zadania |
Obraz RGB |
|
Słownictwo |
Ustalane w treningu |
Definiowane w promptcie |
|
Wielozadaniowość |
Jeden model na zadanie |
Jeden model, wiele zadań |
|
Parametry kamery (intrinsics) |
Często wymagane |
Nie używane |
|
Zdolność generowania |
Tracona w dostrajaniu |
Zachowana |
|
Koszt wnioskowania |
Niski |
Wysoki (pełny generator obrazów) |
Benchmarki to mieszanka wyraźnych zwycięstw i jednej uczciwej porażki. Wszystko w trybie zero-shot transfer, tzn. model nigdy nie widział zbiorów treningowych benchmarków ewaluacyjnych.
Obszary przewagi:
δ (dokładność progowa) 0,929 na czterech zróżnicowanych zbiorach, poprawiając wynik Depth Anything V3 (0,918).Niedobór wydajności:
W GenAI-Bench Vision Banana wygrywa 53,5% porównań ludzkich z bazowym Nano Banana Pro. Oto przykład testu ugruntowania w warunkach rzeczywistych z artykułu:
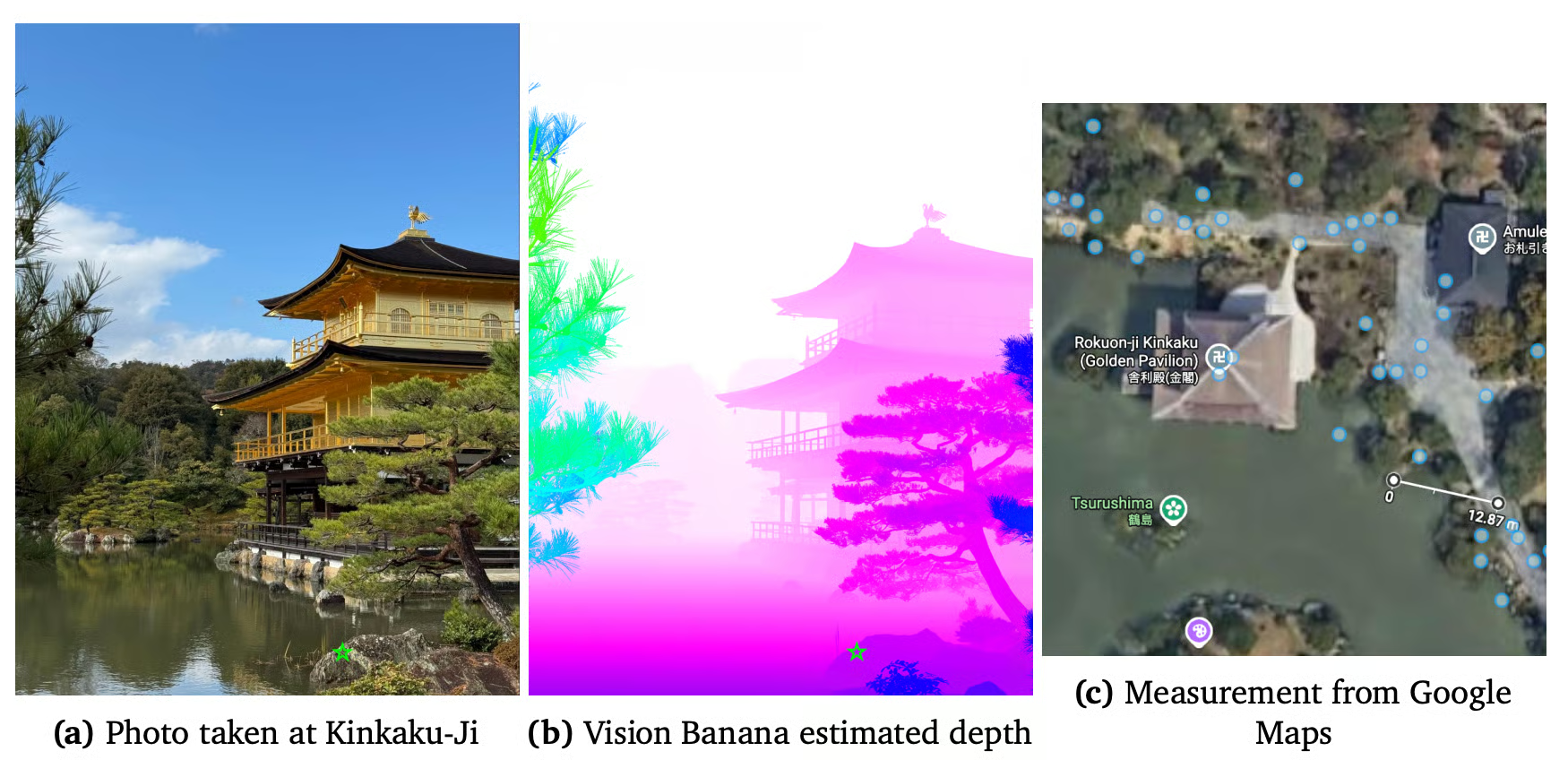
Rysunek 5: Estymacja głębi przez Vision Banana (Źródło)
Autor zrobił zdjęcie smartfonem w pobliżu Kinkaku-ji. Vision Banana przewidziała konkretny punkt w odległości 13,71 m. Google Maps wskazuje 12,87 m, co daje 6,5% bezwzględnego błędu względnego na zdjęciu z telefonu bez kalibracji, parametrów wewnętrznych czy przygotowania. To rodzaj testu, który lepiej przewiduje zachowanie w wdrożeniu niż same liczby z benchmarków.
Vision Banana ma cztery ograniczenia warte odnotowania. Obejmują one:
Vision Banana to konkretny dowód, że generatory obrazów wykonują już ciężką pracę związaną ze zrozumieniem wizualnym, a wydobycie tych możliwości wymaga dopasowania, a nie nowych architektur.
Szczegółowe wkłady artykułu to
Artykuł promuje też mentalny model „najpierw generowanie”, gdzie zadania specyfikuje się promptem, a wyjścia dekoduje z powrotem z obrazów RGB, i gdzie te same wagi obsługują zarówno tworzenie, jak i parsowanie treści wizualnych.
Można przetestować prompty ze strony projektu na bazowym Nano Banana Pro lub Nano Banana 2, aby zobaczyć, co jest już dostępne bez dostrajania instrukcjami, oraz budować funkcje segmentation-by-reasoning z modelami klasy NBP i multimodalnym routerem LLM zamiast od razu trenować niestandardowe potoki.
Najlepsze kursy AI multimodalnej
Track
course
course