
Programa
Aprendizagem profunda Em Python
18 h
A visão computacional sempre funcionou com uma separação clara entre modelos que geram imagens e modelos que as entendem. Frameworks generativos eram a principal fonte de síntese, enquanto arquiteturas discriminativas focavam em classificação, segmentação ou regressão de profundidade. O roteiro padrão para qualquer tarefa nova em visão era escolher uma arquitetura, acoplar uma cabeça específica para a tarefa e fazer fine-tuning com dados rotulados.
É essa suposição que o Vision Banana, do Google DeepMind, quer derrubar. O artigo defende que geradores de imagens já aprenderam tudo o que um modelo de visão generalista precisa, incluindo segmentação, profundidade, normais de superfície e muito mais. Na visão dos autores, o que falta é apenas uma camada leve de instruction tuning para tornar essas capacidades latentes mensuráveis em benchmarks.
Neste post, começo explicando o que é o Vision Banana e por que o artigo chamou a atenção da área, depois mostro como o modelo funciona. Encerrando, trago o que deu certo, o que ainda não funciona e os pontos que os profissionais devem levar daqui. Ao longo do texto, destaco as perguntas que tive ao ler o artigo — provavelmente as mesmas de outros leitores.
Observação: o Vision Banana em si não é público. O que temos é o artigo e a página do projeto. O modelo base é construído sobre o Nano Banana Pro e está disponível via Gemini API e Google AI Studio.
Vision Banana é um modelo de pesquisa do Google DeepMind, criado a partir do Nano Banana Pro (gerador texto-para-imagem) com uma camada leve de instruction tuning usando uma mistura dos dados originais de treino e uma pequena porção de dados de tarefas de visão computacional.
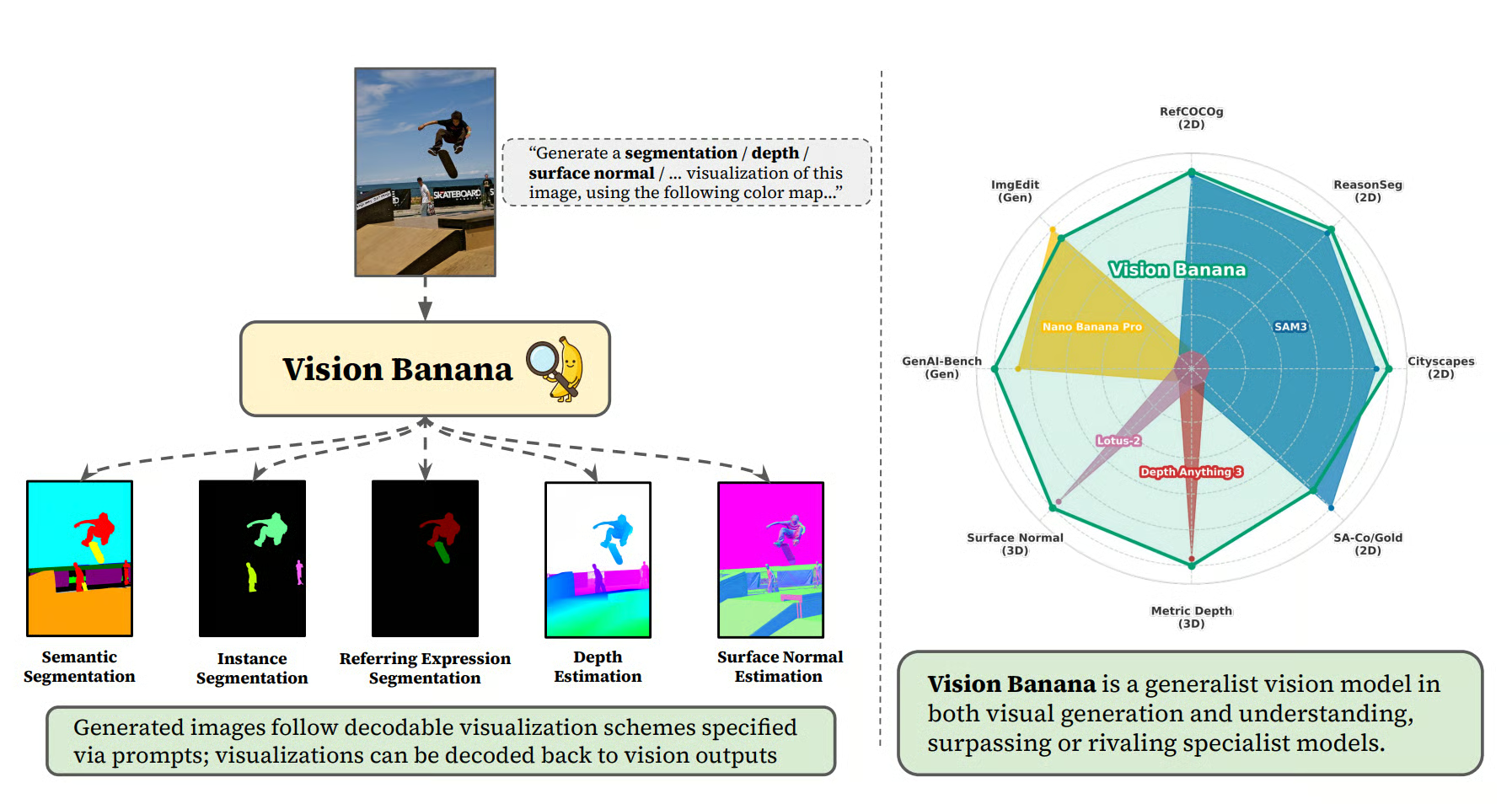
Figura 1: capacidades ocultas de entendimento visual em geradores de imagem via instruction-tuning no Nano Banana Pro (Fonte)
A receita é:
Toda a metodologia de treino não exige nova arquitetura, cabeças customizadas, perdas auxiliares ou decoders especializados.
O modelo resultante:
Tudo isso sob um protocolo rigoroso de transferência zero-shot, garantindo que o modelo nunca viu os conjuntos de treino dos benchmarks nos quais é avaliado.
O aprendizado de representações visuais já testou muitos objetivos de pré-treinamento ao longo dos anos. Os mais comuns incluem:
O importante é que nenhum deles é generativo. A geração de imagens sempre foi tratada como uma capacidade downstream, não como base para entendimento. As primeiras tentativas de pré-treinamento generativo (iGPT, LVM) ficaram atrás de métodos contrastivos em benchmarks de qualidade de representação.
A escala de objetivos generativos autorregressivos via predição do próximo token catalisou o surgimento de capacidades generalistas zero-shot em modelos como o GPT-3. Comportamentos complexos downstream mostraram-se latentes no espaço de pesos de alta dimensão e vieram à tona por meio de fine-tuning supervisionado leve e alinhamento por instruções. Exemplos incluem:
O Vision Banana defende que estamos no mesmo momento para visão. O artigo traça explicitamente uma analogia entre o pré-treinamento por geração de imagens e o pré-treinamento de modelos de linguagem, e entre instruction tuning e a etapa de alinhamento.
Se a analogia se sustentar, vamos parar de construir pipelines específicos por tarefa e tratar um único grande gerador de imagens como a camada fundacional, especificando tarefas via prompts.
O mecanismo é simples: toda tarefa de visão é reformulada como "gerar uma imagem RGB com estas propriedades" e, no momento do decodificador, você transforma essa imagem RGB de volta em previsões da tarefa de forma determinística.
Veja como cada tarefa é mapeada:
Faça um prompt com atribuições de cores por classe e, na decodificação, agrupe os pixels à cor especificada mais próxima. O vocabulário é o que você colocar no prompt; é open-vocabulary por construção.
Fica mais claro com um exemplo. Eis um prompt do artigo:
This image is a per-pixel class labeling of the input. The macaron cakes are represented by (255, 255, 0). The round plates are represented by (255, 192, 128). The slice cakes are depicted in (64, 192, 64). The flowers are shown in (128, 0, 64). The tongs are (255, 0, 192).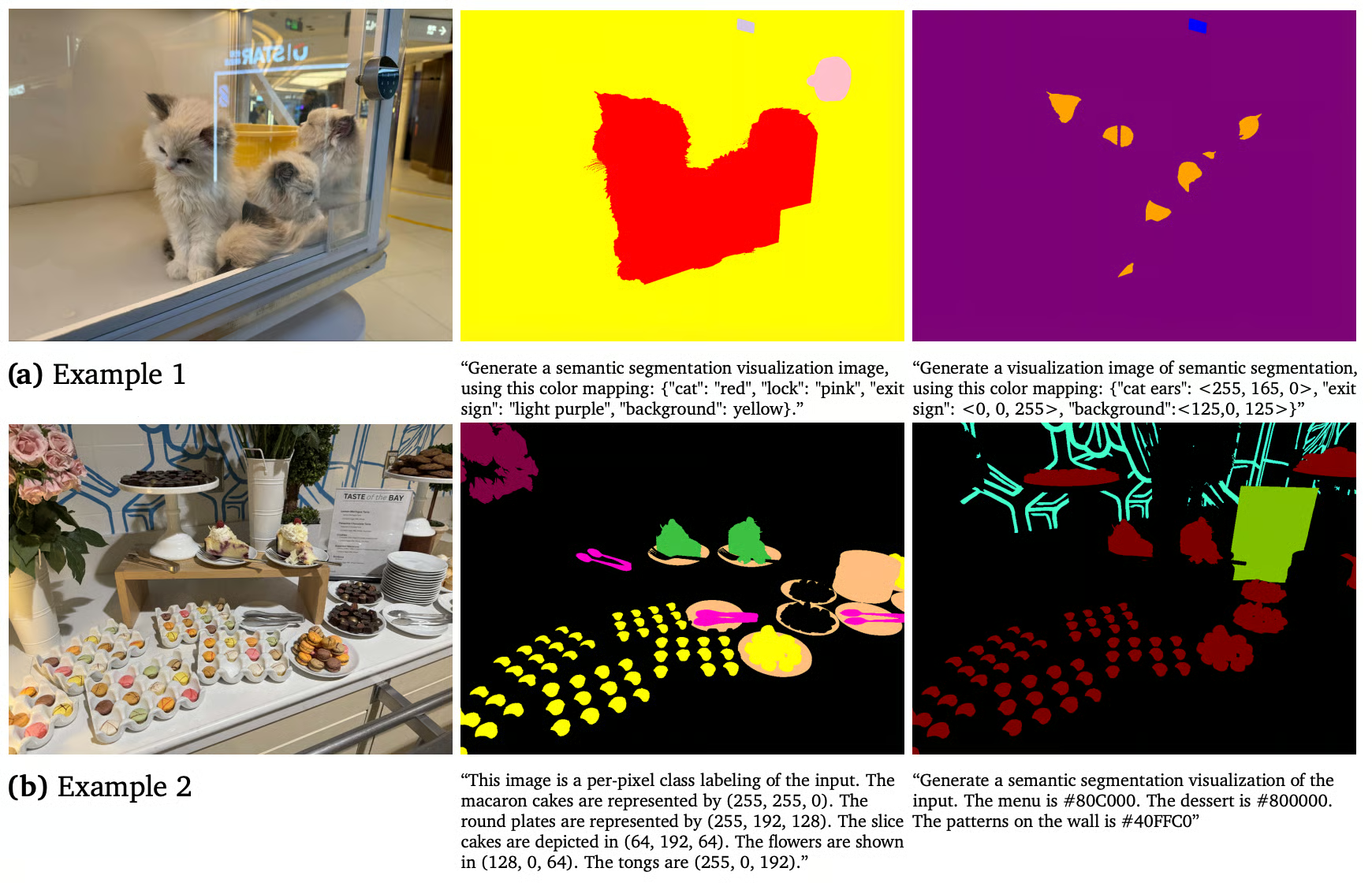
Figura 2: segmentação semântica (Fonte)
Segmentação por instância é mais complexa que a semântica, porque o número de instâncias não é conhecido de antemão. Logo, não dá para pré-atribuir cores.
A solução do Vision Banana é processar uma classe por inferência, deixar o modelo atribuir dinamicamente cores distintas a instâncias distintas e, depois, na decodificação, agrupar pixels pelos modos de cor.
O Vision Banana aceita um prompt com uma descrição em linguagem natural do que segmentar e retorna uma máscara. Exemplo do artigo:
A segmentation map image. The stretching cat is rendered in green, the cat that is cleaning itself is in cyan.É aqui que o raciocínio multimodal embutido no pré-treinamento generativo brilha. Modelos discriminativos sofrem com expressões referenciais porque a tarefa exige raciocínio linguístico e visual conjunto. Modelos generativos treinados em bilhões de pares legenda-imagem lidam com isso naturalmente.
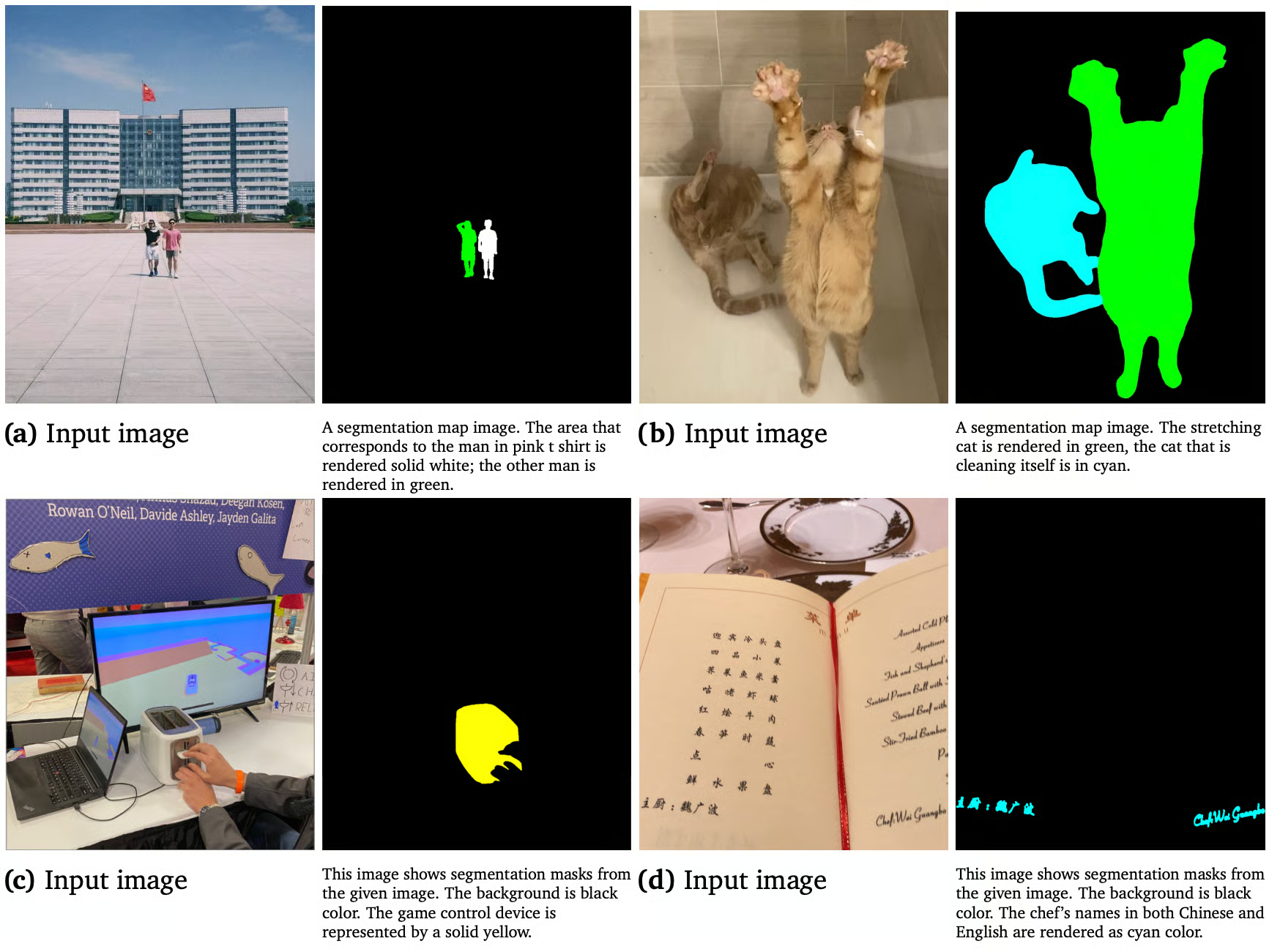
Figura 3: o Vision Banana entende prompts em linguagem natural e raciocina sobre eles (Fonte)
Tanto profundidade quanto normais de superfície são projetadas no espaço RGB via mapeamentos bijetivos, garantindo que as propriedades geométricas latentes sejam preservadas sem perda de informação durante a transformação. Vamos detalhar a codificação de profundidade para RGB na seção a seguir.
Esse paradigma unificado de inferência trata toda tarefa de visão computacional como um problema determinístico de geração de imagem. Ao manter uma interface RGB consistente em todo o pipeline, o modelo evita ramificações arquiteturais específicas por tarefa e depende totalmente do condicionamento por prompt para definir a semântica da saída.
Agora, vamos entender profundidade com um pouco mais de detalhe. É aqui que a abordagem pode desandar com mais facilidade.
Se a codificação não for bijetiva, você não recupera distâncias métricas na decodificação e toda a tese de "geração de imagem como interface universal" cai por terra. Vale entender isso para saber se a abordagem é sólida ou apenas um truque.
O problema é que valores de profundidade são números reais ilimitados em [0, ∞), enquanto RGB é limitado a [0, 1]. Então, para usar "gerar o mapa de profundidade" como sinal de treino, você precisa de um mapeamento bijetivo no qual cada profundidade métrica corresponda a um único valor RGB e, na decodificação, seja possível invertê-lo de volta para metros.
A abordagem do Vision Banana tem duas etapas:
Os autores usam a transformação de potência de Barron (2025) com parâmetro de forma λ = -3, o que dá mais resolução às regiões próximas do que às distantes. Um objeto a 2 metros recebe mais precisão do que um a 200 metros. Isso combina com o que a maioria das aplicações precisa: objetos manipuláveis, não os distantes.
Em seguida, eles interpolam ao longo de um caminho linear por partes que percorre as arestas do cubo RGB, essencialmente a primeira iteração de uma curva de Hilbert 3D. Isso produz transições de cor suaves e perceptualmente coerentes, sem ambiguidade sobre qual cor corresponde a qual profundidade.
Como ambas as etapas são estritamente invertíveis, a composição é uma bijeção. Eles então treinam com verdade-terreno codificada em RGB e, na inferência, projetam o RGB previsto na aresta mais próxima do cubo e invertem de volta para metros.
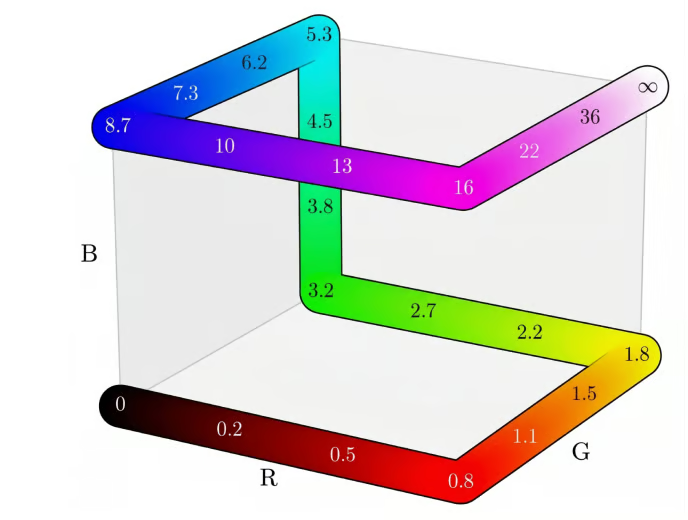
Figura 4: uma visualização da nossa bijeção entre distâncias escalares métricas d ≥ 0 e valores de cor RGB (Fonte)
Para robustez, o treino é aumentado com colormaps alternativos como Plasma, Inferno, Viridis e escala de cinza, para que o modelo lide com o estilo de visualização que você pedir no prompt.
Normais de superfície são mais simples porque já são vetores unitários com componentes em [-1, 1], o que mapeia diretamente para RGB com a convenção padrão do espaço da câmera (+x para a direita, +y para cima, +z saindo do plano da imagem). Assim, verde claro significa voltado para cima, vermelho rosado para a esquerda e azul/roxo claro voltado para a câmera. Sem necessidade de warp.
Observação: o Vision Banana não usa parâmetros intrínsecos da câmera em nenhum lugar, nem no treino nem na inferência. A maioria dos métodos SOTA de profundidade (Depth Anything V3, MoGe-2, UniK3D, DepthLM) usa intrínsecos em alguma etapa porque ajudam a desambiguar a escala monocular.
O fato de o Vision Banana inferir escala absoluta apenas por priors visuais e ainda assim vencer é a evidência mais forte do artigo de que o pré-treinamento generativo está fazendo trabalho geométrico, e não apenas casando padrões de visualizações vistas no treino.
A forma mais limpa de ver o que muda de fato é comparar os dois paradigmas diretamente em uma única tarefa. Vamos comparar estimativa de profundidade com a abordagem especialista (Marigold, Lotus, Depth Anything V3) e o Vision Banana.
Os dois paradigmas produzem artefatos diferentes. Marigold é uma ferramenta especializada, enquanto o Vision Banana é um generalista cuja abrangência vem de uma única etapa de treino.
As diferenças se desdobram em como o modelo é usado na prática:
|
Aspecto |
Especialista (estilo Marigold) |
Vision Banana |
|
Formato de saída |
Tensor específico da tarefa |
Imagem RGB |
|
Vocabulário |
Fixo no treino |
Definido no prompt |
|
Multitarefa |
Um modelo por tarefa |
Um modelo, muitas tarefas |
|
Intrínsecos da câmera |
Frequentemente necessários |
Não usados |
|
Capacidade de geração |
Perdida no fine-tuning |
Preservada |
|
Custo de inferência |
Baixo |
Alto (gerador de imagem completo) |
Os benchmarks trazem um mix de vitórias claras e uma derrota honesta. Tudo em zero-shot transfer, ou seja, o modelo não viu os conjuntos de treino dos benchmarks de avaliação.
Destaques de desempenho:
δ (acurácia por limiar) média de 0,929 em quatro datasets distintos, superando o Depth Anything V3 (0,918).Déficit de desempenho:
No GenAI-Bench, o Vision Banana vence 53,5% das comparações humanas contra o Nano Banana Pro base. Eis um exemplo de teste de grounding em cenário real do artigo:
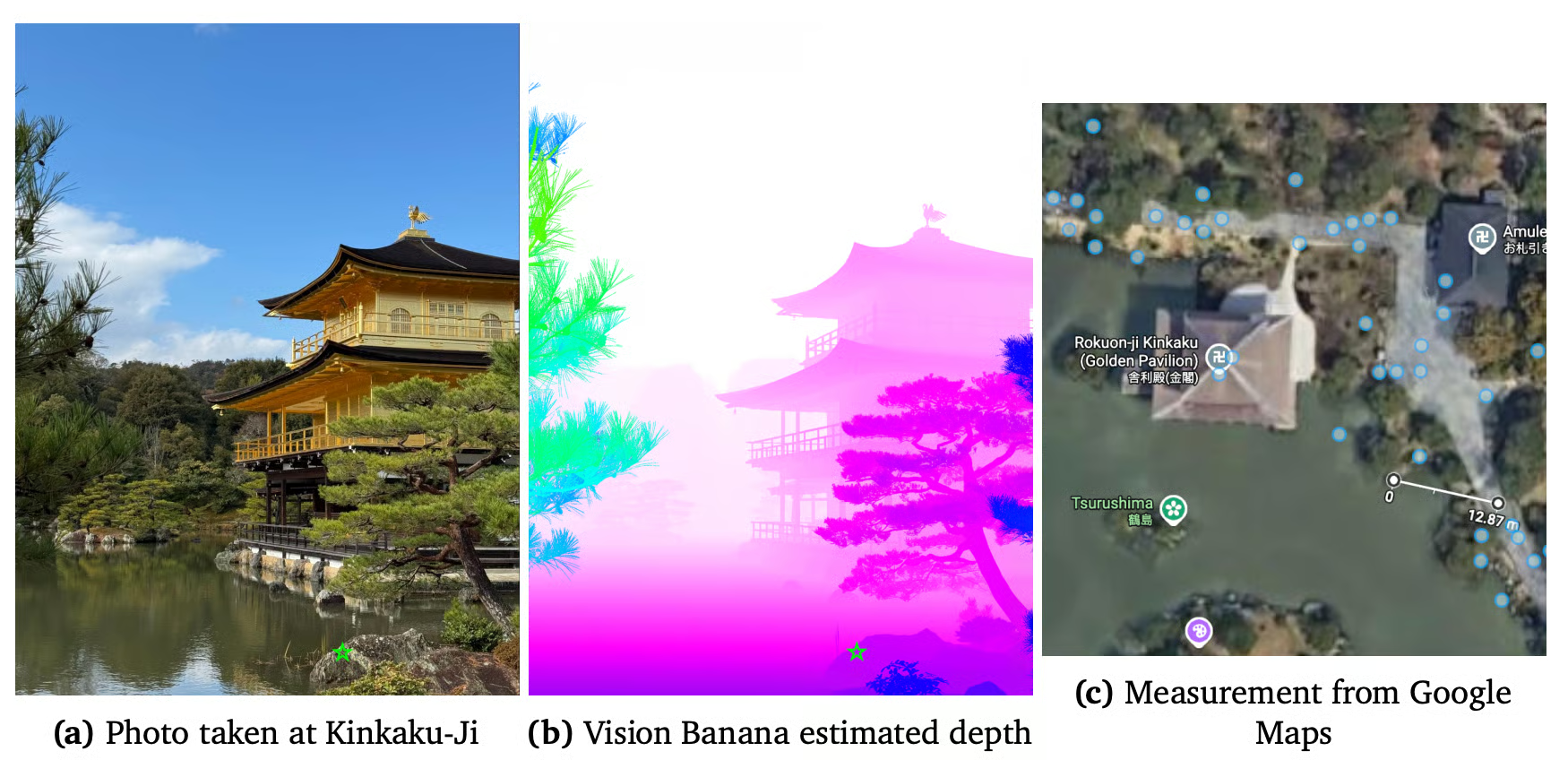
Figura 5: estimativa de profundidade do Vision Banana (Fonte)
Um dos autores tirou uma foto de celular perto de Kinkaku-Ji. O Vision Banana previu um ponto específico a 13,71 metros. O Google Maps indica 12,87 — erro relativo absoluto de 6,5% numa foto de celular sem calibração, sem intrínsecos, sem setup. Esse é o tipo de teste que antecipa melhor o comportamento em produção do que números de benchmark.
O Vision Banana tem quatro restrições que vale destacar:
O Vision Banana demonstra, de forma concreta, que geradores de imagens já fazem o grosso do trabalho de entendimento visual e que expor essas capacidades exige alinhamento, não novas arquiteturas.
As contribuições específicas do artigo são
O artigo também promove um modelo mental “generation-first”, no qual tarefas são especificadas por prompt e saídas são decodificadas de volta a partir de imagens RGB, e no qual os mesmos pesos lidam tanto com produzir quanto com interpretar conteúdo visual.
Você pode testar os prompts da página do projeto no Nano Banana Pro base ou no Nano Banana 2 para ver o que já é acessível sem instruction tuning, e construir recursos de reasoning+segmentation com modelos da classe NBP e um roteador LLM multimodal em vez de treinar pipelines customizados diretamente.
Principais cursos de IA multimodal
Programa
Curso
Curso
blog
Dr Ana Rojo-Echeburúa
9 min
blog
Abid Ali Awan
11 min
blog
Bhavishya Pandit
8 min
blog
Hesam Sheikh Hassani
15 min
Tutorial
Arunn Thevapalan
Tutorial
Amberle McKee

