Track
Machine Learning Scientist in Python
85 hr
Reinforcement learning (RL) is a powerful machine learning paradigm. In RL, software, usually called an agent, learns to interact with environments to solve complex problems through trial and error, all without human intervention. Among RL algorithms, SARSA stands out for its efficient on-policy nature.
SARSA stands for State-Action-Reward-State-Action, representing a cycle the agent follows to solve problems. This cycle allows the agent to learn from its past mistakes and occasionally venture out to try new things. This behavior makes the algorithm particularly effective in specific problem types and differentiates it from off-policy algorithms like Q-learning.
In this tutorial, you will learn how SARSA works and how you can implement it in Python. To make your understanding concrete, we will use a classic Taxi Ride problem throughout. We will also discuss SARSA’s advantages, limitations, and real-world applications.
SARSA, short for State-Action-Reward-State-Action describes a sequence of events in a learning process. It is an effective learning method for computer programs (agents) to make good decisions in various scenarios.
The main idea behind SARSA is trial and error. The agent takes an action in a situation, observes the result, and adjusts its strategy based on the outcome (good or bad). This process is repeated many times, leading to improvements in the agent’s decisions over time.
What makes SARSA special among RL algorithms is that SARSA learns from actual choices made by the agent, including when it is trying new things. This approach is particularly useful when the learning journey is just as important as the final result.
It is like a robot learning to ride a bike by actually riding it, falls and all, instead of finding the shortest path from A to B by using protective training wheels.
In this tutorial, we will use Numpy and the Gymnasium reinforcement learning library extensively. While Numpy will help us write the SARSA algorithm, Gymnasium provides us with built-in environments to test our work.
Let’s install them in a new virtual environment with the following commands:
$ conda create -n sarsa python=3.9 -y
$ conda activate sarsa
$ pip install "gymnasium[atari]" numpy matplotlib
$ pip install autorom[accept-rom-license] # Downloading Gym env data files
$ AutoROM --accept-license # Accepting the license for data files
$ pip install ipykernel # Install Jupyter kernel manager
$ ipython kernel install --user --name=sarsa # Add the new Conda env to JupyterBefore you continue, I highly encourage you to read our Introduction to Reinforcement Learning article. It covers the fundamental ideas behind RF, such as agents, environments, exploration versus exploitation dilemma, and Q-learning.
Throughout the tutorial, we will use the Taxi-v3 environment, which is a classic reinforcement learning problem provided by the Gymnasium library. It simulates a taxi driver navigating a 5x5 grid world to pick up and drop off passengers.
To load the environment, we use the .make() method of Gymnasium with an rgb_array render mode (to visualize the environment later):
import gymnasium as gym
env = gym.make('Taxi-v3', render_mode='rgb_array')The environment is a 5x5 grid with four designated locations: red (R), green (G), yellow (Y), and blue (B). The taxi starts at a random square and must pick up a passenger at one of the colored locations and drop them off at another.
The taxi can move North, South, East, or West and can also attempt to pick up or drop off a passenger.
Here is how we can visualize the initial state of the environment with Matplotlib:
import matplotlib.pyplot as plt
# Reset the environment to get an initial state
# Each time we reset the environment, we get a new random state
initial_state, _ = env.reset()
# Render the initial state
img = env.render()
# Create a figure and display the environment
fig, ax = plt.subplots(figsize=(8, 8))
ax.imshow(img)
# Remove axis ticks
ax.set_xticks([])
ax.set_yticks([]);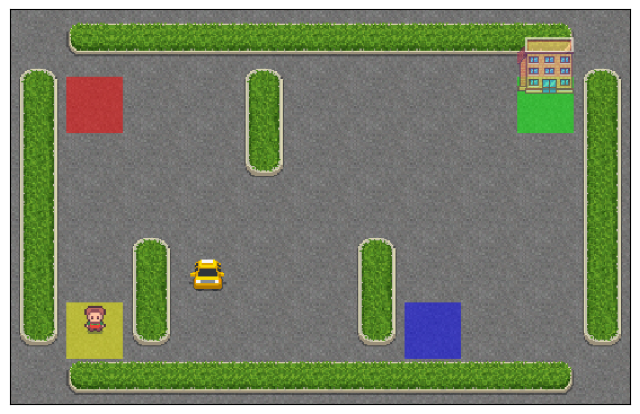
First, we reset the environment to get an initial state. Then, we display this initial state with the render function, receiving a Numpy image array. Matplotlib's imshow() function takes this array and produces a clean visualization without axis ticks.
Take a moment to understand the layout of the Taxi-v3 grid world, noting the taxi’s position, the barriers, passenger locations, and the destination.
The agent (the taxi) receives +20 points for successfully dropping off a passenger. Illegal pick-up or drop-off results in -10 reward. All the while, every time step produces -1 reward to encourage the taxi to complete the task quickly.
A single episode of the Taxi-v3 environment terminates in the case of a successful drop-off or when the maximum number of time steps is reached.
# The number of states and actions
n_states = env.observation_space.n
n_actions = env.action_space.n
print(n_states)
print(n_actions)500
6There are 500 states in the environment’s state space. Each state is represented by:
The action codes are:
The goal is for the agent to learn an optimal policy to maximize its total reward by efficiently picking up and dropping off passengers.
Before we write the full algorithm, let’s see how the State-Action-Reward-State-Action cycle works using our environment.
First, we define how many episodes we want the interaction to continue. A single episode represents a complete run of the taxi task, from the initial state to either successfully dropping off the passenger or reaching the maximum number of time steps. Each episode allows the agent to learn from its experiences and improve its strategy over time.
n_episodes = 5000Now, we write the interaction loop:
for episode in range(n_episodes):
state, _ = env.reset()
done = False
total_reward = 0
steps = 0
while not done:
# Choose a random action
action = env.action_space.sample()
# Take the action and observe the result
next_state, reward, terminated, truncated, _ = env.step(action)
done = terminated or truncated
# Update total reward and step count
total_reward += reward
steps += 1
# Move to the next state
state = next_state
if episode % 1000 == 0:
print(f"Episode {episode}, Total Reward: {total_reward}, Steps: {steps}")Episode 0, Total Reward: -812, Steps: 200
Episode 1000, Total Reward: -830, Steps: 200
Episode 2000, Total Reward: -902, Steps: 200
Episode 3000, Total Reward: -522, Steps: 129
Episode 4000, Total Reward: -767, Steps: 200The above code demonstrates the basic SARSA interaction cycle without implementing any learning algorithm:
env.reset().env.step(action). This version uses random actions to demonstrate the interaction loop.next_state, reward, ... = env.take(action).In the above interaction loop, the taxi keeps moving around the environment in all directions and performing random actions until the time steps run out.
Before we continue, let’s implement a feature to animate our interaction loops. This allows us to visually see the taxi interacting with the environment.
Creating the animation will be a simple process:
env.render() function.moviepy, we concatenate all image arrays to create a single GIF.Let’s modify the code:
env = gym.make("Taxi-v3", render_mode="rgb_array")
n_episodes = 1
frames = [] # for animation
for episode in range(n_episodes):
# Reset the environment
state, _ = env.reset()
# Capture the state as an image
img = env.render()
frames.append(img)
done = False
total_reward = 0
steps = 0
while not done:
# Choose a random action
action = env.action_space.sample()
# Take the action and observe the result
next_state, reward, terminated, truncated, _ = env.step(action)
done = terminated or truncated
# Capture the next state as an image
img = env.render()
frames.append(img)
# Update total reward and step count
total_reward += reward
steps += 1
# Move to the next state
state = next_stateIn this version, we set the number of episodes to just one, as rendering environment states as images take too much time. We also create an empty list to store our image arrays. Then, the interaction loop continues like before. The only difference is the two extra lines of code where we render the environment as an image and append it to frames.
Now, we must have 201 images inside frames (one extra image for the additional state):
>>> len(frames)
201Let’s turn these images into a GIF using moviepy library:
from moviepy.editor import ImageSequenceClip # pip install moviepy
def create_gif(frames: list, filename, fps=5):
"""
Creates a GIF animation from a list of RGBA NumPy arrays.
Args:
frames: A list of RGBA NumPy arrays representing the animation frames.
filename: The output filename for the GIF animation.
fps: The frames per second of the animation (default: 10).
"""
clip = ImageSequenceClip(frames, fps=fps)
clip.write_gif(filename, fps=fps)
# Example usage
create_gif(frames, "animation.gif", fps=25) # saves the GIF locallyThe create_gif() function takes a list of frames and converts them into a GIF using the ImageSequenceClip class of moviepy. An important parameter is the frames per second, fps, which control the duration of the GIF. The more frames per second, the shorter the GIF.
In the end, we convert a single episode’s frames into a GIF with 25 FPS. Here is the result:
As you can see, the taxi has no idea what it is doing and didn’t even get close to the passenger. Let’s give it some brains by adding SARSA into its navigation system.
We will build the code for SARSA from scratch so that you remember each step clearly.
1. Setting up the Gymnasium environment:
import gymnasium as gym
import numpy as np
import matplotlib.pyplot as plt
# Create the Taxi environment
env = gym.make("Taxi-v3", render_mode="rgb_array")2. Initializing a Q-table
# Initialize Q-table
n_states = env.observation_space.n
n_actions = env.action_space.n
Q_table = np.zeros((n_states, n_actions))In this step, we introduce a new data structure — the Q-table. It has (number of states) x (number of actions) dimensions. The table would look like this to our agent, the taxi driver:
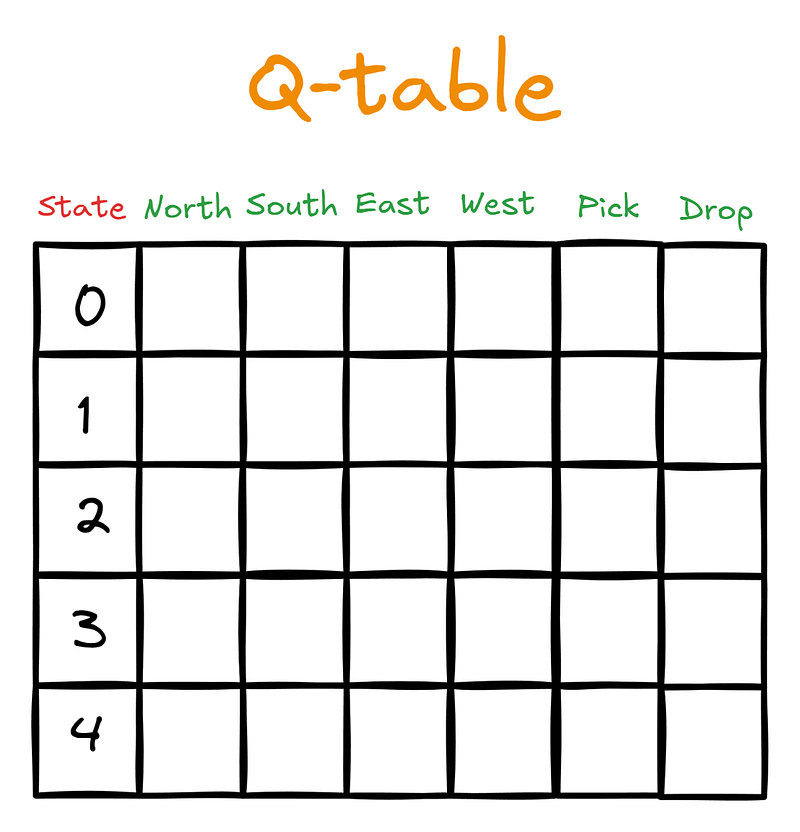
Initially, the Q-table will be filled with zeros:
>>> Q_table.shape
(500, 6)Then, as the agent starts interacting with the environment guided by SARSA, it will update the Q-table with Q-values. The Q-values are scores that tell the agent which action is the best one to take, given the current state.
3. Defining SARSA hyperparameters
After initializing the Q-table, we set the hyperparameters of SARSA to common values (more on them later):
# SARSA parameters
alpha = 0.1 # Learning rate
gamma = 0.99 # Discount factor
epsilon = 0.1 # Exploration rate for epsilon-greedy policy
n_episodes = 200004. Defining storage for performance metrics
Then, we define two lists to store performance metrics: the total reward and the number of time steps for each episode. The agent’s goal is to collect as much reward as possible in the shortest time possible:
# Lists to store performance metrics
episode_rewards = []
episode_lengths = []5. Epsilon-greedy policy for taking action
In the previous section, our agent was unguided — it was taking random actions. We want to change that by giving the driver an Epsilon-Greedy strategy:
def epsilon_greedy(state, epsilon):
if np.random.random() < epsilon:
# Take random action - explore
return env.action_space.sample()
else:
# Take action with the highest Q-value - exploit
return np.argmax(Q_table[state])This strategy is intended to control the crucial balance between exploration and exploitation. With probability epsilon, the agent explores the environment by taking a random action, while with probability 1-epsilon, it exploits its current knowledge by choosing the action with the highest Q-value from the Q-table. This approach allows the agent to discover new, potentially better strategies while also using what it has already learned.
6. Writing the SARSA training loop
Finally, we write the SARSA training loop. The beginning of the loop is already familiar to us. The only difference is that we use the epsilon_greedy() function to tell us which action to take in the current state:
# SARSA training loop
for episode in range(n_episodes):
state, _ = env.reset()
action = epsilon_greedy(state, epsilon)
done = False
total_reward = 0
steps = 0
...Then, we start the while loop that allows us to run the interaction cycle until we reach a termination state:
# SARSA training loop
for episode in range(n_episodes):
...
while not done:
next_state, reward, terminated, truncated, _ = env.step(action)
done = terminated or truncated
next_action = epsilon_greedy(next_state, epsilon)Inside the while loop, we take the action returned by epsilon_greedy() and receive the next state, the reward for our action, and a boolean value for whether the episode terminated or not.
Then, we come to the crucial part—SARSA’s update rule:
# SARSA training loop
for episode in range(n_episodes):
...
while not done:
next_state, reward, terminated, truncated, _ = env.step(action)
done = terminated or truncated
next_action = epsilon_greedy(next_state, epsilon)
# SARSA update rule
Q_table[state, action] += alpha * (
reward + gamma * Q_table[next_state, next_action] - Q_table[state, action]
)The update rule comes from the following formula:
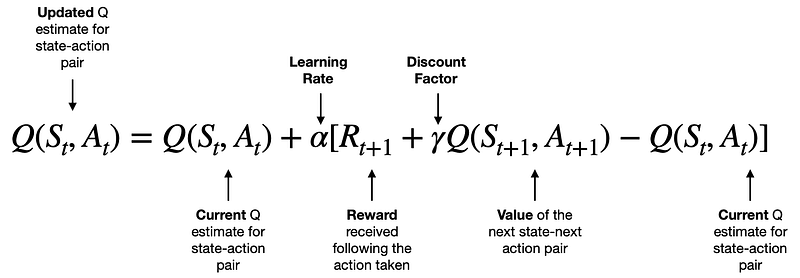
[Source]
We will learn the intuition behind this formula in the next section. Right now, consider the formula as some math magic that updates the Q-values of our Q-table according to the rules of SARSA.
Once we make the Q update, we change the state and action variables to the resulting state and action, add the reward received to the total episode reward, and increase the number of time steps.
# SARSA training loop
for episode in range(n_episodes):
...
while not done:
...
state = next_state
action = next_action
total_reward += reward
steps += 1The while loop continues until we reach maximum time steps (200 for the taxi environment) or when the taxi successfully drops off its passenger at the correct location.
Once the loop terminates, we record the total episode reward and episode length. We also print the average episode reward and length every 1000 episodes:
# SARSA training loop
for episode in range(n_episodes):
...
while not done:
...
episode_rewards.append(total_reward)
episode_lengths.append(steps)
if episode % 1000 == 0:
avg_reward = np.mean(episode_rewards[-1000:])
avg_length = np.mean(episode_lengths[-1000:])
print(f"Episode {episode}, Avg Reward: {avg_reward:.2f}, Avg Length: {avg_length:.2f}")Here is the full interaction loop executed:
# SARSA training loop
for episode in range(n_episodes):
state, _ = env.reset()
action = epsilon_greedy(state, epsilon)
done = False
total_reward = 0
steps = 0
while not done:
next_state, reward, terminated, truncated, _ = env.step(action)
done = terminated or truncated
next_action = epsilon_greedy(next_state, epsilon)
Q_table[state, action] += alpha * (
reward + gamma * Q_table[next_state, next_action] - Q_table[state, action]
)
state = next_state
action = next_action
total_reward += reward
steps += 1
episode_rewards.append(total_reward)
episode_lengths.append(steps)
if episode % 2000 == 0:
avg_reward = np.mean(episode_rewards[-1000:])
avg_length = np.mean(episode_lengths[-1000:])
print(f"Episode {episode}, Avg Reward: {avg_reward:.2f}, Avg Length: {avg_length:.2f}")Episode 0, Avg Reward: -551.00, Avg Length: 185.00
Episode 2000, Avg Reward: -4.37, Avg Length: 19.47
Episode 4000, Avg Reward: 1.98, Avg Length: 15.09
Episode 6000, Avg Reward: 2.29, Avg Length: 14.79
Episode 8000, Avg Reward: 2.06, Avg Length: 14.80
Episode 10000, Avg Reward: 2.16, Avg Length: 14.78
Episode 12000, Avg Reward: 2.06, Avg Length: 14.89
Episode 14000, Avg Reward: 2.33, Avg Length: 14.81
Episode 16000, Avg Reward: 2.36, Avg Length: 14.66
Episode 18000, Avg Reward: 2.53, Avg Length: 14.72As you can see from the output, the average reward and the number of time steps per episode went down dramatically as we ran more and more episodes.
We can see this visually by plotting the episode_rewards and episode_lengths arrays:
# Plot the learning curve
plt.figure(figsize=(12, 5))
plt.subplot(1, 2, 1)
plt.plot(episode_rewards)
plt.title("Episode Rewards")
plt.xlabel("Episode")
plt.ylabel("Total Reward")
plt.subplot(1, 2, 2)
plt.plot(episode_lengths)
plt.title("Episode Lengths")
plt.xlabel("Episode")
plt.ylabel("Number of Steps")
plt.tight_layout()
plt.show()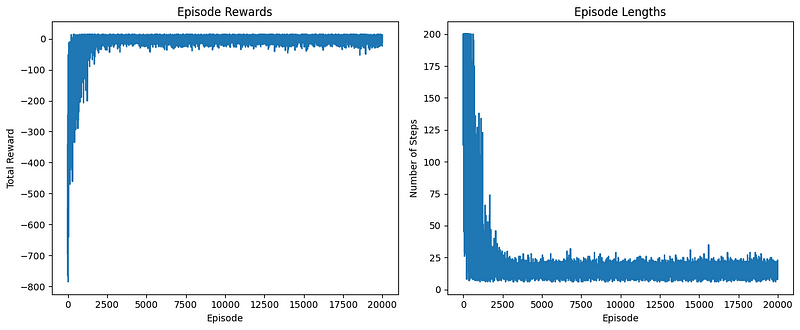
The left plot displays the total reward obtained in each episode. We can observe that:
The right plot shows the number of steps taken in each episode. We can see that:
In short duration, we have covered a lot of ground. Let’s now take a step back and organize everything we wrote. We will create functions for each of the steps we took to implement SARSA.
First, a function to create an environment:
import gymnasium as gym
import numpy as np
import matplotlib.pyplot as plt
from moviepy.editor import ImageSequenceClip
def create_environment(env_name="Taxi-v3", render_mode="rgb_array"):
"""Create and return a Gymnasium environment."""
return gym.make(env_name, render_mode=render_mode)Then, a function to initialize a Q-table given an environment:
def initialize_q_table(env):
"""Initialize and return a Q-table for the given environment."""
n_states = env.observation_space.n
n_actions = env.action_space.n
return np.zeros((n_states, n_actions))The Epsilon-greedy strategy that accepts an environment, a Q-table, current state and epsilon:
def epsilon_greedy(env, Q_table, state, epsilon=0.1):
"""Epsilon-greedy action selection."""
if np.random.random() < epsilon:
return env.action_space.sample()
else:
return np.argmax(Q_table[state])SARSA’s update rule, which requires a Q-table, the current state, the taken action in that state, the reward for the action, the next state and action:
def sarsa_update(Q_table, state, action, reward, next_state, next_action, alpha, gamma):
"""Perform SARSA update on Q-table."""
Q_table[state, action] += alpha * (
reward + gamma * Q_table[next_state, next_action] - Q_table[state, action]
)Finally, a large function to train the agent with SARSA that requires an environment, the number of episodes to run, alpha, gamma, and epsilon parameters:
def train_sarsa(env, n_episodes=20000, alpha=0.1, gamma=0.99, epsilon=0.1):
"""Train the agent using SARSA algorithm."""
Q_table = initialize_q_table(env)
episode_rewards = []
episode_lengths = []
for episode in range(n_episodes):
state, _ = env.reset()
action = epsilon_greedy(env, Q_table, state, epsilon)
done = False
total_reward = 0
steps = 0
while not done:
next_state, reward, terminated, truncated, _ = env.step(action)
done = terminated or truncated
next_action = epsilon_greedy(env, Q_table, next_state, epsilon)
sarsa_update(
Q_table, state, action, reward, next_state, next_action, alpha, gamma
)
state = next_state
action = next_action
total_reward += reward
steps += 1
episode_rewards.append(total_reward)
episode_lengths.append(steps)
return Q_table, episode_rewards, episode_lengthsAlso, a function to plot performance metrics:
def plot_learning_curve(episode_rewards, episode_lengths):
"""Plot the learning curve."""
plt.figure(figsize=(12, 5))
plt.subplot(1, 2, 1)
plt.plot(episode_rewards)
plt.title("Episode Rewards")
plt.xlabel("Episode")
plt.ylabel("Total Reward")
plt.subplot(1, 2, 2)
plt.plot(episode_lengths)
plt.title("Episode Lengths")
plt.xlabel("Episode")
plt.ylabel("Number of Steps")
plt.tight_layout()
plt.show()Our previous create_gif() function:
def create_gif(frames, filename, fps=5):
"""Creates a GIF animation from a list of frames."""
clip = ImageSequenceClip(frames, fps=fps)
clip.write_gif(filename, fps=fps)And one other function to run a single episode with rendering using a complete, learned Q-table (for animation purposes):
def run_episode(env, Q_table, epsilon=0):
"""Run a single episode using the learned Q-table."""
state, _ = env.reset()
done = False
total_reward = 0
frames = [env.render()]
while not done:
action = epsilon_greedy(env, Q_table, state, epsilon)
next_state, reward, terminated, truncated, _ = env.step(action)
done = terminated or truncated
frames.append(env.render())
total_reward += reward
state = next_state
return frames, total_rewardNow, let’s execute everything:
if __name__ == "__main__":
env = create_environment()
Q_table, episode_rewards, episode_lengths = train_sarsa(env, n_episodes=20000)
plot_learning_curve(episode_rewards, episode_lengths)
frames, total_reward = run_episode(env, Q_table)
create_gif(frames, "images/sarsa_final_animation.gif", fps=1)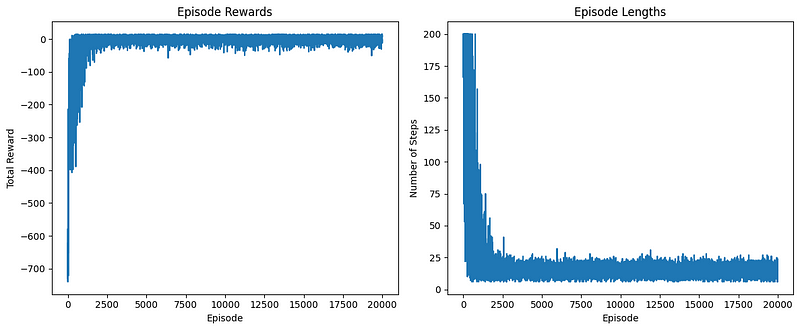
The performance plots look good. Now, let’s look at the generated GIF:
Hooray! The taxi is correctly picking up the passenger from the blue square and dropping them off at the yellow square.
I’ve pasted the entire organized code for implementing SARSA into a GitHub gist so that you can return to it any time you want.
At the heart of SARSA lies its update rule, which controls how the agent learns from its experiences. Let’s break down this rule and explore the intuition behind it:
Q(s, a) = Q(s, a) + α [R + γ Q(s', a') - Q(s, a)]
SARSA’s update rule aims to refine the agent’s understanding of the environment by adjusting Q-values based on new experiences. Here’s how it works:
The term [R + γ * Q(s’, a’) — Q(s, a)] is known as the temporal difference (TD) error. Think of it as a measure of surprise:
This error helps the agent continuously refine its estimates, driving the learning process towards an optimal policy.
1. Learning rate (α):
2. Discount factor (γ):
3. Exploration rate (ε):
SARSA’s update rule allows the agent to learn from its experiences by constantly adjusting its estimates of state-action values. With each interaction, the agent becomes a little bit wiser about its environment. Over many episodes, this process leads to the development of an optimal policy for navigating the environment.
By tuning the hyperparameters, we can control various aspects of the learning process, allowing SARSA to adapt to different types of problems and environments. This flexibility, combined with its intuitive update rule, makes SARSA a powerful and widely used reinforcement learning algorithm.
Though SARSA and Q-learning are both widely used reinforcement learning algorithms, they do have some important differences. And those differences are critical to understanding when and how to use each algorithm.
An on-policy algorithm, SARSA, learns the value of the policy it follows, including even the steps taken during exploration. Q-learning is off-policy; it learns the value of the optimal policy—even when it’s not following that policy, it still learns the value of the optimal policy when it ultimately reaches the end of the episode. That’s why we mentioned in the beginning that SARSA must be used when the learning journey is just as important as the outcome itself. Q-learning doesn’t care about the learning journey much.
The key difference is that SARSA uses the Q-value of the next action actually taken (a’), while Q-learning uses the maximum Q-value of the next state (max(Q(s’, a’))).
When updating the Q-values, SARSA does not ignore the exploration policy and is thus more conservative. In comparison, Q-learning always assumes that the agent will take the optimal action in the future and is therefore more aggressive.
While both algorithms eventually reach the optimal policy, Q-learning can often learn more quickly, particularly in deterministic environments.
In environments where exploration can lead to bad outcomes, SARSA generally learns safer policies because it takes into account the actual policy being followed.
In the classic “cliff walking” problem, SARSA typically learns a safer path that stays away from the cliff edge, while Q-learning might learn a riskier path that walks along the edge.
In certain random environments, SARSA can be more stable because it takes into account the actual next action, even when that action is a suboptimal exploratory one.
Q-learning can be more sensitive to the choice of learning rate and exploration rate, especially in environments with significant stochasticity.
When it comes to robotics or other physical systems where exploring the environment is costly and we want to implement safer policies, we might prefer the on-policy algorithm SARSA. When we are in the simulated world, in games, or in other environments where we can get a lot of feedback and where we want to find the optimal policy in a way that is fast and somewhat safe, we might like Q-learning a lot better.
So you might think that SARSA is sort of the safer province, and Q-learning is the faster, more reckless approach. In practice, it often depends on the specific problem. Both algorithms are very strong, and it always makes sense to know what the differences between them are.
In this comprehensive guide, we’ve explored the SARSA algorithm, covering its core concepts, implementation details, and practical applications using the Taxi-v3 environment.
Key takeaways include:
SARSA’s ability to learn safer policies makes it suitable for real-world applications where exploration costs are high, though it may converge slower than off-policy algorithms like Q-learning in some scenarios.
Remember, choosing between SARSA and other algorithms depends on your specific problem and environment. Experimentation and fine-tuning are crucial for optimal results.
We encourage you to build upon this foundation by exploring more complex environments, implementing SARSA with function approximation, or diving into other reinforcement learning algorithms.
Here are some related resources to help you along the way:
Top DataCamp Courses
Track
Course
Course
cheat-sheet
Karlijn Willems
Tutorial
Bex Tuychiev
Tutorial
Abid Ali Awan
Tutorial
Bunmi Akinremi
Tutorial
Bex Tuychiev
code-along
George Boorman