
Course
Linear Algebra for Data Science in R
4 hr
21K
An affine transformation is a process that moves points in space to new points by applying a linear transformation and a shift, which is called translation. You can rotate, scale, shear, reflect, and then slide everything across, and straight lines will stay straight.
Affine transformations are omnipresent because they capture a wide variety of geometric changes that keep the geometry of an object while yet being cheap to compute.
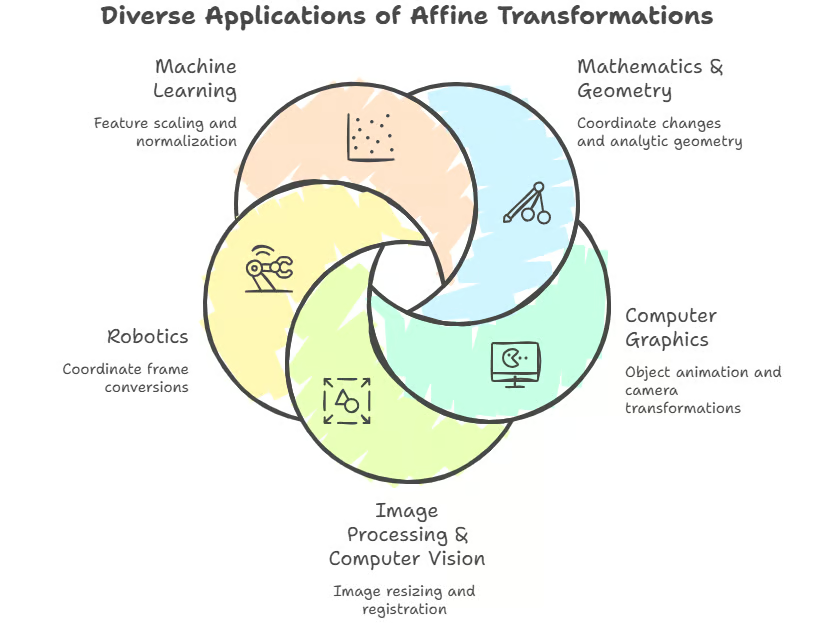
Diverse applications of affine transformations. Source of image: Napkin AI
The idea originated when mathematicians like Leonhard Euler and August Ferdinand Möbius tried to figure out what properties stay invariant even when other things change.
Today, it is a key part of the digital world, powering everything from the CSS on a webpage to complicated medical imaging.
Affine transformations sit right between “pure linear algebra” and “real-world geometry.” They keep the math clean while allowing translations, which linear maps alone cannot do.
A vector space has a special point called the origin (even if you don’t draw it, it’s there conceptually). In a vector space, vectors can be added and scaled, and there is a distinguished “zero vector.”
An affine space looks like a vector space without a chosen origin. You can still talk about:
But you cannot add two points meaningfully, because addition of points depends on an origin choice.
Formally, an affine space A over a vector space V is a set of points with a free and transitive action of V. Practically: differences of points live in V, but the individual points themselves do not.
An affine transformation is a mapping between affine spaces that preserves affine combinations (more on that later) and, geometrically, preserves straight lines and parallelism.
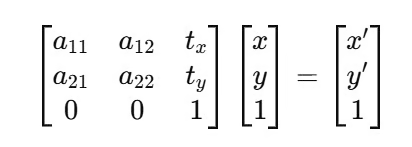
In coordinates, an affine transformation has the form:

Affine transformation in matrix form.
Where:
This “linear + constant” structure is why affine maps are so popular in engineering and computing: they’re expressive, but still fast and stable to apply.
Affine transformations preserve several geometric relationships that are “structural,” while allowing shapes to stretch or skew.
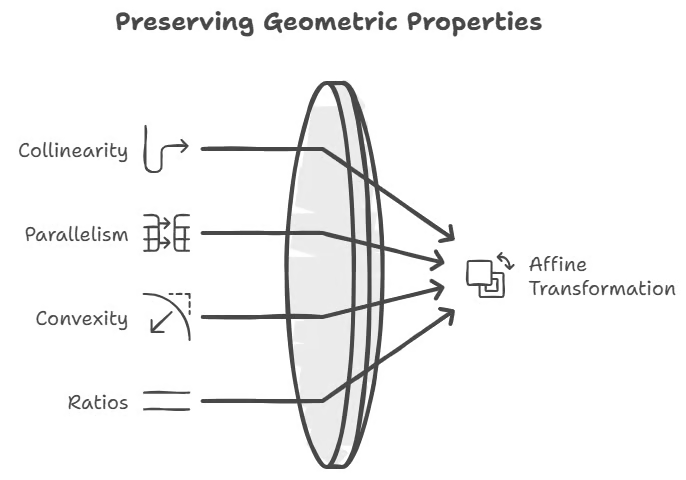
Properties Preserved in Affine Transformation. Image Source: Napkin AI
Preserved:
A neat way to express this is through affine combinations:

Affine maps preserve these combinations.
Not preserved (in general):
Finally, affine transformations are closed under composition: doing one affine transformation after another is still an affine transformation.
Affine transformations form a group under composition (often called the affine group, written Aff(n)).
The composition works cleanly if

and

then

This is still affine.
A note on invertibility: Ax+b is invertible if A is invertible (det(A)≠0). Then:

So you get a powerful algebra: build complex transforms by chaining simple ones, and reverse them when needed.
To compute affine transformations efficiently, we utilize matrices—particularly homogeneous coordinates, which facilitate translations in a matrix-compatible manner.
In n dimensions, the transformation is as follows:

where
A governs the alteration of shape (linear component).
b regulates displacement (translation)
The requirement for invertibility is that matrix (A) must be invertible. In simple terms, what it means is that if (A) compresses all points onto a line (resulting in a decrease in rank), it cannot be uniquely reversed.
Translations cannot be represented by an (n x n) matrix acting on (x) alone. Homogeneous coordinates address this issue by introducing an additional coordinate.
Represent a 2D point ((x, y)) as ((x, y, 1)).
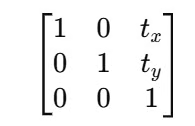
Then a 2D affine transform becomes a 3×3 matrix:
2D affine transformation using homogeneous coordinates (3×3 matrix). Source: Author
Benefits:
Most affine transformations used in practice involve a handful of steps.
Translation moves every point by the same displacement: T(x)=x+b
2D homogeneous form is represented by:
Translation as a homogeneous transformation matrix (2D). Source: Author
This form is used in graphics (to move things), robotics (to change coordinate frames), and vision (for image alignments).
Uniform scaling: In 2D, uniform scaling means using the same factor (s) in all directions:
Uniform 2D scaling matrix. Source: Author
Non-uniform scaling:
Non-uniform 2D scaling matrix. Source: Author
3D scaling, on the other hand, is like a 3×3 diagonal matrix. When you scale something, straight lines and parallelism is preserved, but distances change (unless s=1).
2D rotation by angle (theta):
2D rotation transformation by angle. Source: Author
When you rotate something in 3D, you do it around an axis (x, y, or z) with the corresponding matrices. When you add translation to a rotation, it stays affine (and becomes a "rigid motion" if you only do rotation and translation).
Shear “slants” shapes. A 2D x-shear is:
2D x-shear representation. Source: Author
A y-shear:
2D y-shear representation. Source: Author
Shears are often used in typography, visual warps, and effects that look like perspective (though genuine perspective is projective, not affine).
When you reflect about axes or planes that go through the origin, that is considered linear reflection (and hence affine).
2D reflection over the x-axis:
2D reflection over the x-axis. Source: Author
On the y-axis:
2D reflection over the y-axis. Source: Author
Reflections change the way things are oriented and are helpful for analyzing symmetry, recognizing patterns, and processing geometry.
In real systems, you rarely use just one transformation in real systems; you link many together.
Suppose:

and

Then:

Order matters. Rotating first and then translating is not the same as translating first and then rotating. This is because translations get "caught" by the next matrix.
A useful approach to remember it is:
For

if (A) is invertible:

In vision, this is often used: you commonly transfer output pixels back to input pixels (inverse mapping) to fill in gaps.
Affine transformations are “linear transformations that come with a built-in shift.”
A linear transformation - L(x)=Ax - must satisfy:
An affine transformation T(x)=Ax+b:
Every linear map is affine (set b=0), but not all affine mappings are linear (any non-zero translation breaks linearity).
You can rewrite:

as “do the linear part (Ax), then add translation (b).”
You already know the 1D version if you've ever seen (y=mx+c). This is also why affine maps are often used in neural networks: a dense layer calculates (Wx+b), which is an affine map. After that, nonlinearity is incorporated.
Computer graphics and computer vision use affine transformations.
This is where affine transformations cease being abstract and start paying rent.
In image processing, affine transforms are used for:
Two important implementation ideas:
Interpolation is important since mapped coordinates don't frequently point to whole pixels. Some common ways are:
Affine transformations are used everywhere in 3D graphics:
A subtle but important point: when scaling is not uniform, surface normals don't always change in the same way as points. To ensure correct lighting, rendering pipelines commonly use the inverse-transpose of the linear part for normals.
Robotics is just the omnipresence of coordinate systems.
Affine transformations map:
In vision-based localization (e.g., visual odometry), minor movements between frames may often be approximated locally as affine in image space, which is helpful for monitoring and figuring out motion movement.
In machine learning, feature scaling is often affine:
This is important as many models (especially gradient-based ones) work better when features are on similar scales.
Affine transformations seem straightforward at first, but the theory is deep, especially when you start to care about invariants like area or alternative coordinate systems.
Advanced Affine Transformation Concepts. Image Source: Napkin AI
Barycentric coordinates express a point as a as a weighted mix of the triangle's vertices:

These coordinates are affine-invariant, which means that if you change the triangle and the point in an affine way, λi stays the same.
That’s why barycentric coordinates are widely used in: texture mapping, mesh interpolation, and finite element analysis.
An affine transform preserves area (2D) or volume (3D) when:

The determinant of A informs you how much the area or volume changes when the linear element is added.
If (|det(A)| > 1), space gets bigger; but if it is less than one, it gets smaller. If it's negative, the orientation changes (like a reflection). These are vital for visuals, physics simulations, and modeling deformation.
Relationships:
So:isometries ⊂ similarities ⊂ affine transformations
This hierarchy lets you pick the proper model for a problem statement. For example, if you need to keep the distance, affine is too broad.
Affine transformations are a type of projective transformation. Projective transforms can model perspective, like how parallel lines meet at a vanishing point. Affine transformations can't do this.
In homogeneous coordinates, projective transformations permit a broader final row than ([0,0,1]). That increased freedom is what makes perspective effects happen.
Affine concepts also work in higher dimensions, like 4D homogeneous transforms in 3D graphics.
Affine transforms are "easy math," but the way they are used can make or break the result.
Common issues:
Best practices:
Affine transforms are embarrassingly parallel, which means that each point or pixel changes on its own. This makes them suitable for SIMD and GPU kernels.
That's why image warps and rendering pipelines work well with GPUs: they can do a lot of multiplication and addition operations at once.
Some common optimizations are: employing fused multiply-add operations, batching transformations, and reducing the number of memory transfers.
Affine transformations are "rigid enough" for a lot of tasks, and they can also be used to make more flexible models.
In morphometrics and medical imaging, pure affine alignment is only the first step. After rough alignment, B-spline-based deformation models let you make smooth, non-rigid warps while still keeping control points easy to understand.
Think of it this way: affine gets the overall image straight, and B-splines take care of the little bends.
Many recognition systems try to be affine invariant so that objects can still be recognized even when the viewpoint changes in a way that is similar to an affine translation.
Techniques include:
This makes operations like matching, tracking, and retrieval more reliable.
In GIS, affine transforms appear in map georeferencing, aligning layers from different sources, or local approximations of coordinate conversions.
Real geodetic transforms can be more complicated, however affine models are often used as local approximations or as part of a broader pipeline.
You don't have to start from scratch with everything; most ecosystems have good support.
Core idea across languages:
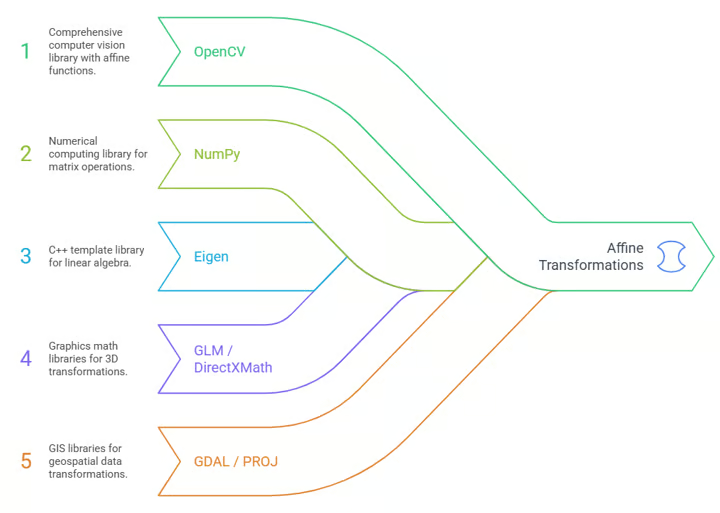
Best Tools and Libraries for Affine Transformations. Image Source: Napkin AI
Widely used tools:
You should select based on your domain: OpenCV for images, GLM for graphics, GDAL/PROJ for GIS.
Hearing the same idea explained in a different way can sometimes make things clearer.
An affine map can be defined as a function that preserves the sanctity of affine combinations:
This formulation doesn't tie itself to a single origin, which is extremely "affine geometry" in spirit. It also makes it clear right away that lines translate to lines.
If affine transformations seem abstract, relate them to what you already know: (y=mx) is linear (it goes through the origin), and (y=mx+b) is affine (it has the same slope effect and a shift).
In higher dimensions, (m) turns into a matrix (A), but the story is still the same: it acts linearly and moves around.
Affine transformations, if you remove all the extra stuff, boils down to really just this: "I'll keep your world made of straight lines and parallel edges, but I can't promise that your angles will stay the same."
If you're thinking in terms of matrices and linear systems, check out Linear Algebra for Data Science in R and tutorials that focus on matrices, including Row Echelon Form Explained.
If you want to get into computer vision, projects like Food Image Classification with Hugging Face and courses like Working with Hugging Face are a good next step.
Learn with DataCamp
Course
Course
Course
Tutorial
Vahab Khademi
Tutorial
Islam Salahuddin
Tutorial
Arunn Thevapalan
Tutorial
Arunn Thevapalan
Tutorial
Arunn Thevapalan
Tutorial
Iheb Gafsi