Course
Introduction to Python
4 hr
6.9M
Imagine being in a zoo trying to recognize if a given animal is a cheetah or a leopard. As a human, your brain can effortlessly analyze body and facial features to come to a valid conclusion. In the same way, Convolutional Neural Networks (CNNs) can be trained to perform the same recognition task, no matter how complex the patterns are. This makes them powerful in the field of computer vision.
This conceptual CNN tutorial will start by providing an overview of what CNNs are and their importance in machine learning. Then it will walk you through a step-by-step implementation of CNN in TensorFlow Framework 2.
A Convolutional Neural Network (CNN or ConvNet) is a deep learning algorithm specifically designed for any task where object recognition is crucial such as image classification, detection, and segmentation. Many real-life applications, such as self-driving cars, surveillance cameras, and more, use CNNs.
These are several reasons why CNNs are important, as highlighted below:
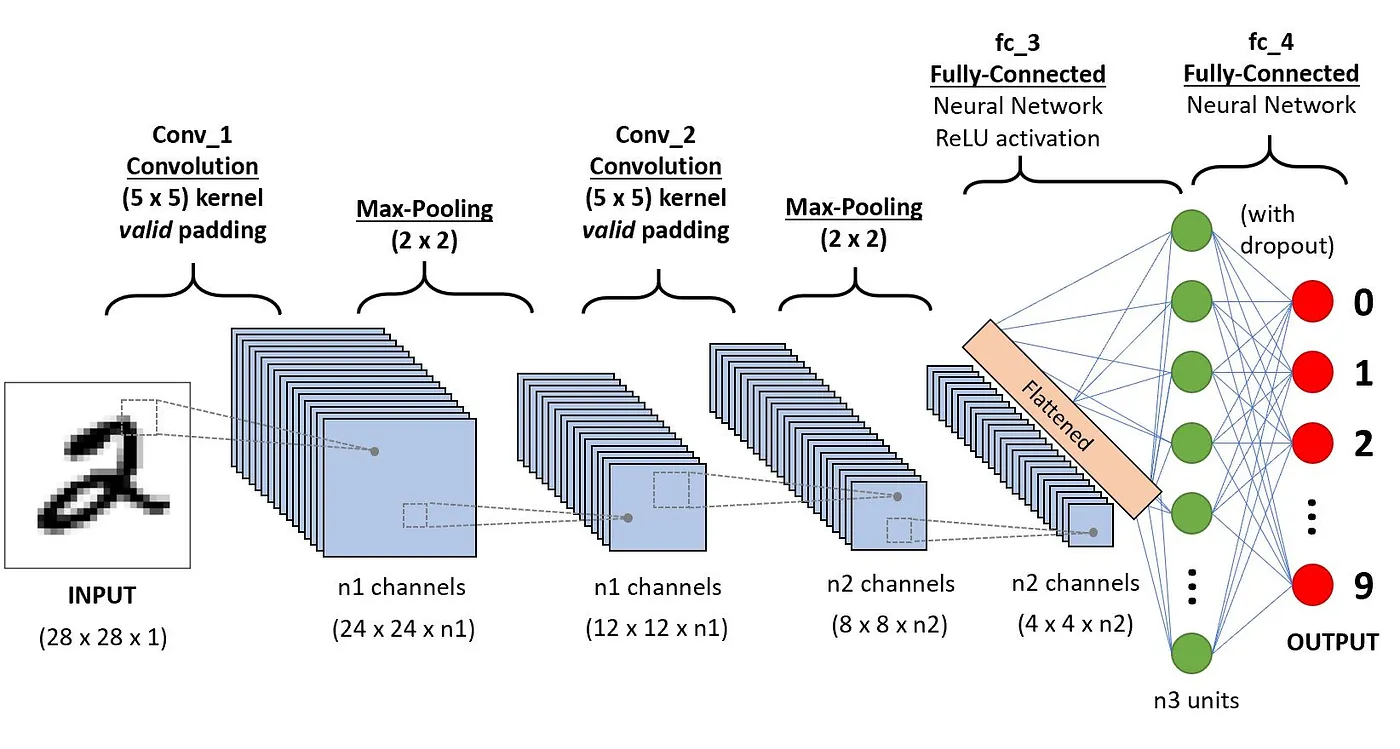
CNNs’ architecture tries to mimic the structure of neurons in the human visual system composed of multiple layers, where each one is responsible for detecting a specific feature in the data. As illustrated in the image below, the typical CNN is made of a combination of four main layers:
Let’s understand how each of these layers works using the following example of classification of the handwritten digit.
This is the first building block of a CNN. As the name suggests, the main mathematical task performed is called convolution, which is the application of a sliding window function to a matrix of pixels representing an image. The sliding function applied to the matrix is called kernel or filter, and both can be used interchangeably.
In the convolution layer, several filters of equal size are applied, and each filter is used to recognize a specific pattern from the image, such as the curving of the digits, the edges, the whole shape of the digits, and more.
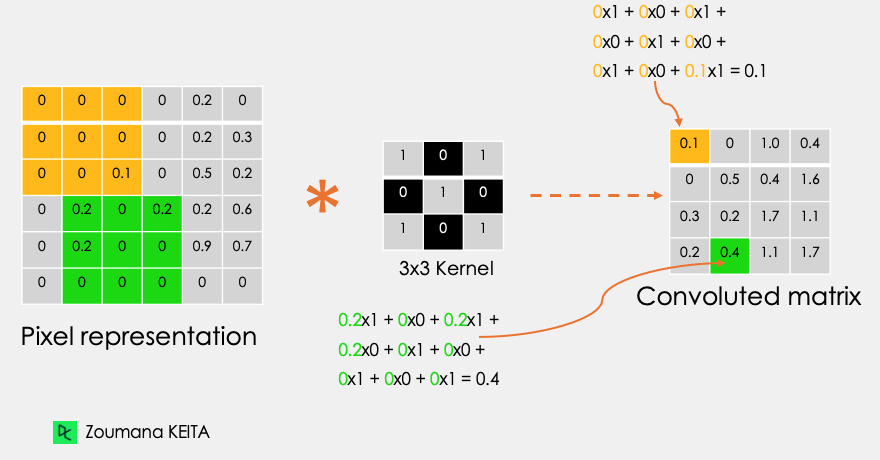
Let’s consider this 32x32 grayscale image of a handwritten digit. The values in the matrix are given for illustration purposes.
![]()
Also, let’s consider the kernel used for the convolution. It is a matrix with a dimension of 3x3. The weights of each element of the kernel is represented in the grid. Zero weights are represented in the black grids and ones in the white grid.
Do we have to manually find these weights?
In real life, the weights of the kernels are determined during the training process of the neural network.
Using these two matrices, we can perform the convolution operation by taking applying the dot product, and work as follows:
The dimension of the convoluted matrix depends on the size of the sliding window. The higher the sliding window, the smaller the dimension.
Another name associated with the kernel in the literature is feature detector because the weights can be fine-tuned to detect specific features in the input image.
For instance:
The more convolution layers the network has, the better the layer is at detecting more abstract features.
A ReLU activation function is applied after each convolution operation. This function helps the network learn non-linear relationships between the features in the image, hence making the network more robust for identifying different patterns. It also helps to mitigate the vanishing gradient problems.
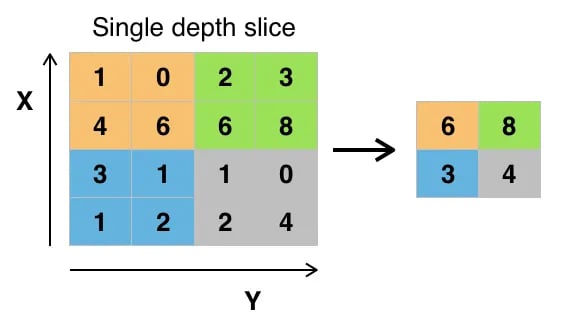
The goal of the pooling layer is to pull the most significant features from the convoluted matrix. This is done by applying some aggregation operations, which reduces the dimension of the feature map (convoluted matrix), hence reducing the memory used while training the network. Pooling is also relevant for mitigating overfitting.
The most common aggregation functions that can be applied are:
Below is an illustration of each of the previous example:
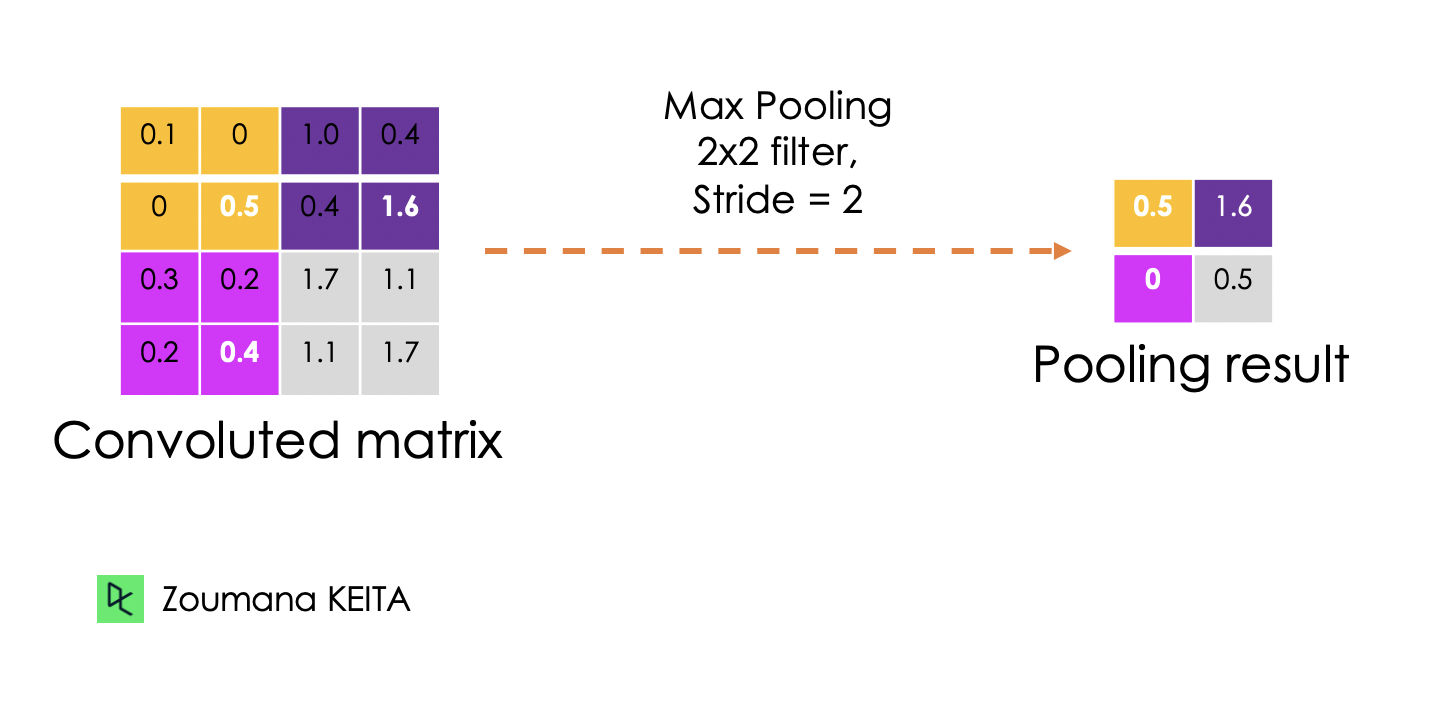
Also, the dimension of the feature map becomes smaller as the polling function is applied.
The last pooling layer flattens its feature map so that it can be processed by the fully connected layer.
These layers are in the last layer of the convolutional neural network, and their inputs correspond to the flattened one-dimensional matrix generated by the last pooling layer. ReLU activations functions are applied to them for non-linearity.
Finally, a softmax prediction layer is used to generate probability values for each of the possible output labels, and the final label predicted is the one with the highest probability score.
Dropout is a regularization technic applied to improve the generalization capability of the neural networks with a large number of parameters. It consists of randomly dropping some neurons during the training process, which forces the remaining neurons to learn new features from the input data.
Since the technical implementation will be performed using TensorFlow 2, the next section aims to provide a complete overview of different components of this framework to efficiently build deep learning models.
Google developed TensorFlow in November 2015. They define it to be an open-source machine learning framework for everyone for several reasons.
All these functionalities make Tensorflow a good candidate for building neural networks.
Furthermore, installing Tensorflow 2 is straightforward and can be performed as follows using the Python package manager pip as explained in the official documentation.
After the installation, we can see that the version being used is the 2.9.1
import tensorflow as tf
print("TensorFlow version:", tf.__version__)Now, let’s further explore the main components for creating those networks.
We mainly deal with high-dimensional data when building machine learning and deep learning models. Tensors are multi-dimensional arrays with a uniform type used to represent different features of the data.
Below is the graphical representation of the different types of dimensions of tensors.
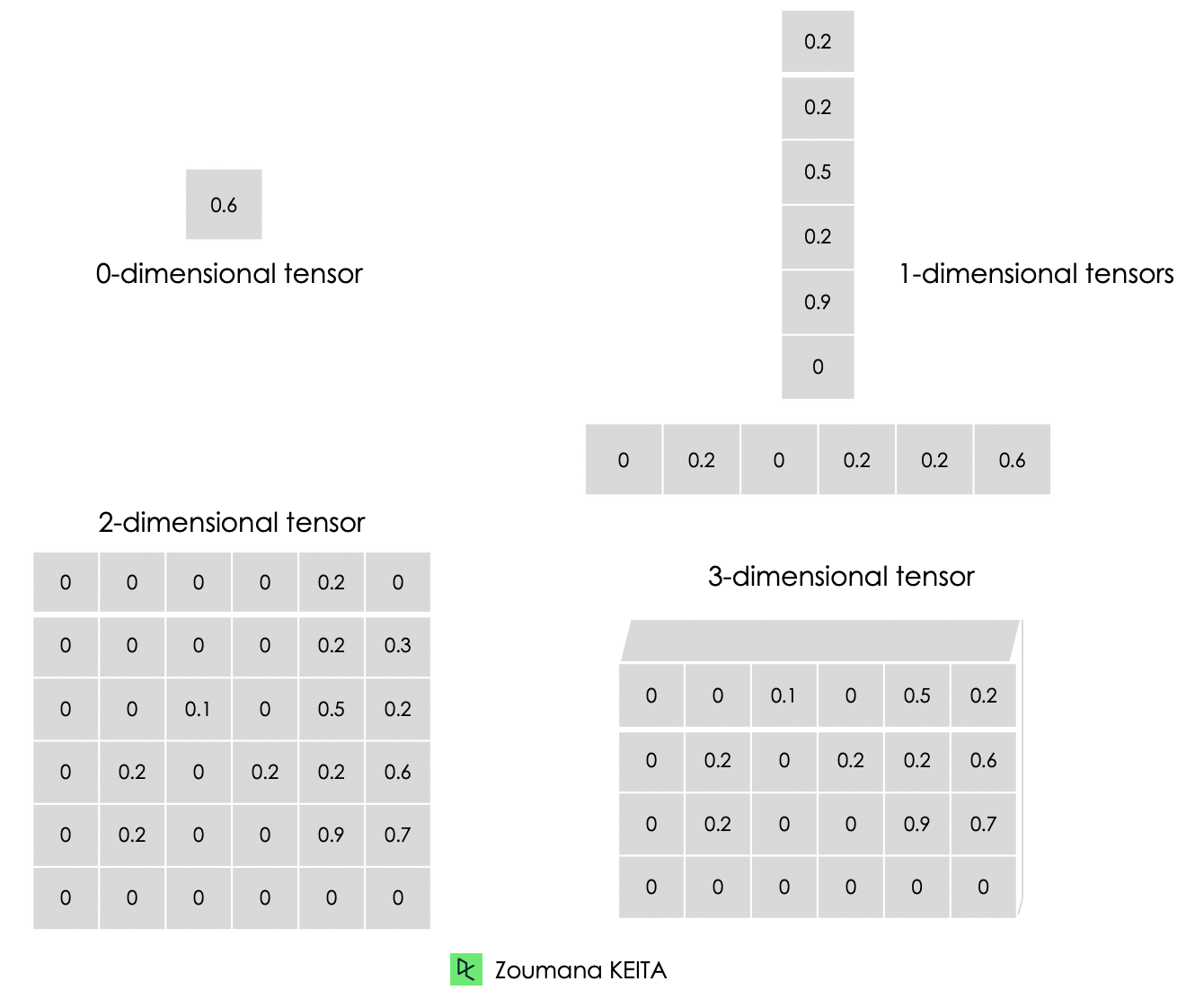
Below is an illustration of a zero to a 3-dimensional tensor. Each tensor is created using the constant() function from TensorFlow.
# Zero dimensional tensor
zero_dim_tensor = tf.constant(20)
print(zero_dim_tensor)
# One dimensional tensor
one_dim_tensor = tf.constant([12, 20, 53, 26, 11, 56])
print(one_dim_tensor)
# Two dimensional tensor
two_dim_array = [[3, 6, 7, 5],
[9, 2, 3, 4],
[7, 1, 10,6],
[0, 8, 11,2]]
two_dim_tensor = tf.constant(two_dim_array)
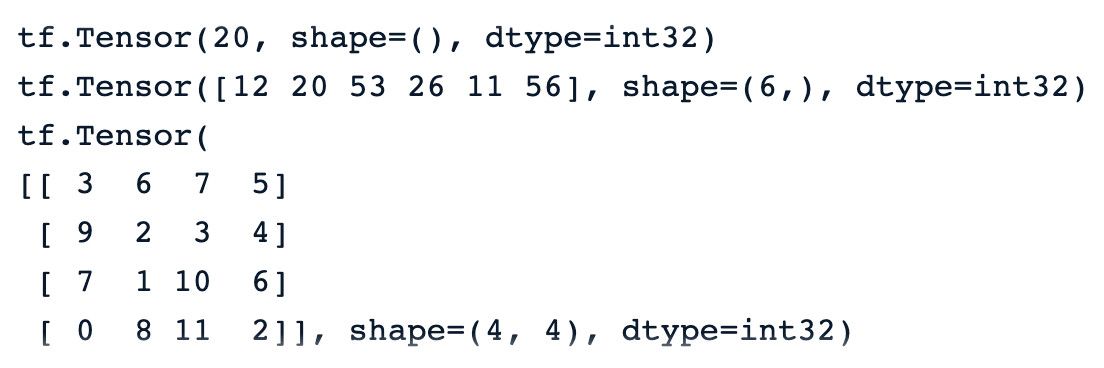
print(two_dim_tensor)A successful execution of the previous code should generate the outputs below, and we can notice the keyword “tf.Tensor” to mean that the result is a tensor. It has three parameters:
Our Tensorflow Tutorial for Beginners provides a complete overview of TensorFlow and teaches how to build and train models.
Many people confuse tensors with matrices. Even though these two objects look similar, they have completely different properties. This section provides a better understanding of the difference between matrices and tensors.
As opposed to matrices, tensors are more suitable for deep learning problems for the following reasons:
Constants are not the only types of tensors. There are also variables and placeholders, which are all building blocks of a computational graph.
A computational graph is basically and a representation of a sequence of operations and the flow of data between them.
Now, let’s understand the difference between these types of tensors.
Constants are tensors whose values do not change during the execution of the computational graph. They are created using the tf.constant() function and are mainly used to store fixed parameters that do not require any change during the model training.
Variables are tensors whose value can be changed during the execution of the computational graph and they are created using the tf.Variable() function. For instance, in the case of neural networks, weights, and biases can be defined as variables since they need to be updated during the training process.
These were used in the first version of Tensorflow as empty containers that do not have specific values. They are just used to reverse a spot for data to be used in the future. This gives the users the freedom to use different datasets and batch sizes during model training and validation.
In Tensorflow version 2, placeholders have been replaced by the tf.function() function, which is a more Pythonic and dynamic approach to feeding data into the computational graph.
Let’s put everything we have learned previously into practice. This section will illustrate the end-to-end implementation of a convolutional neural network in TensorFlow applied to the CIFAR-10 dataset, which is a built-in dataset with the following properties:
The source code of the article is available on DataCamp’s workspace
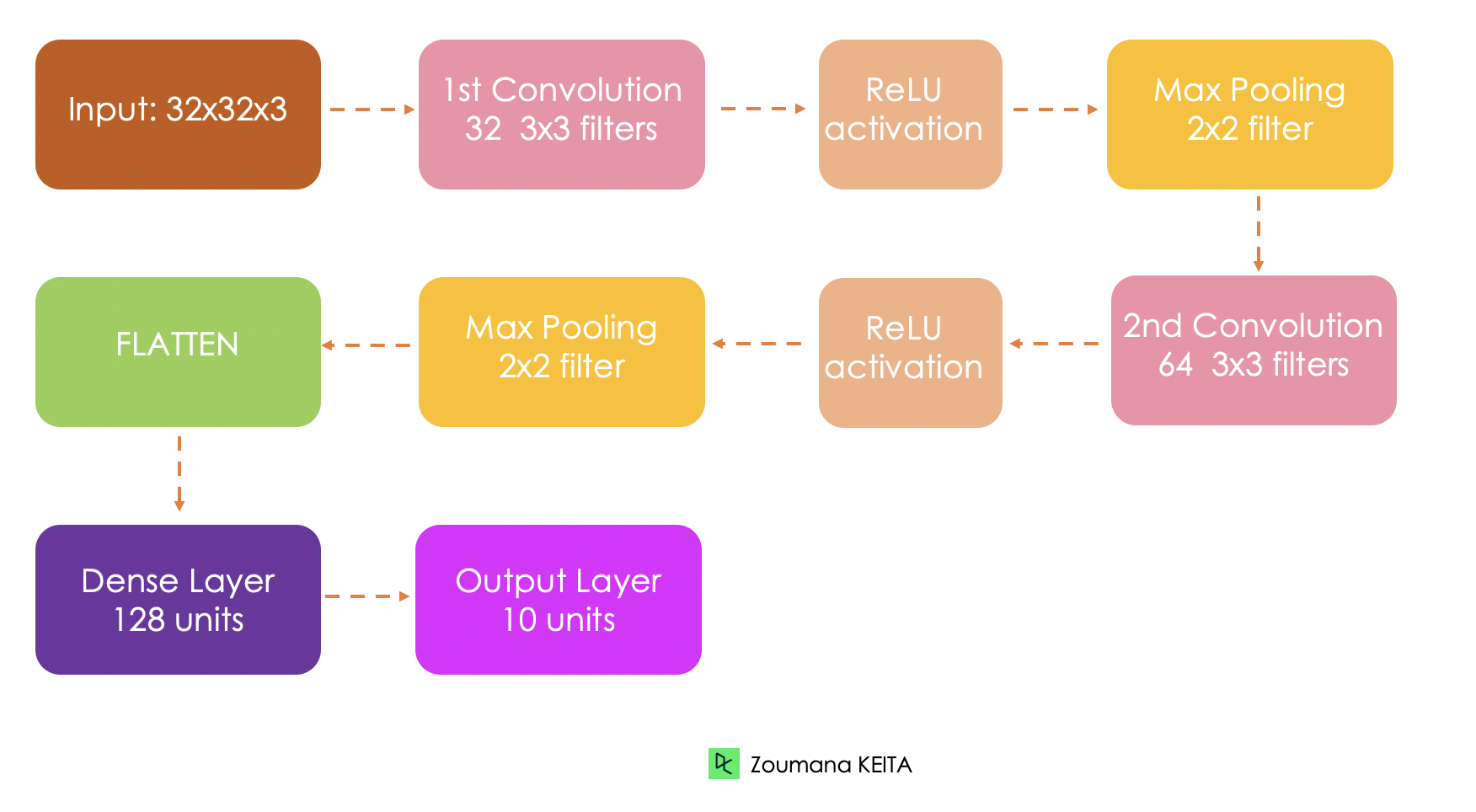
Before getting into the technical implementation, let’s first understand the overall architecture of the network being implemented.
The built-in dataset is loaded from the keras.datasets() as follows:
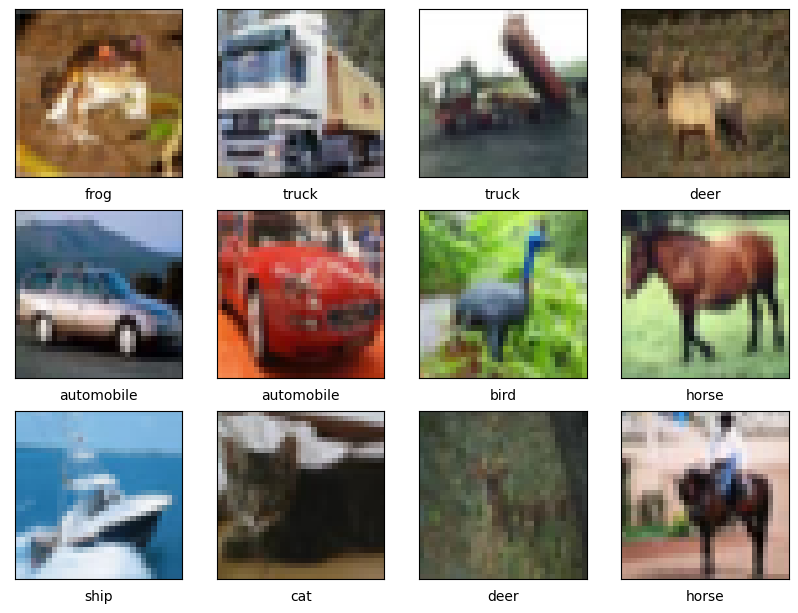
(train_images, train_labels), (test_images, test_labels) = cf10.load_data()In this section, we will focus solely on showing some sample images since we already know the proportion of each class in both the training and testing data.
The helper function show_images() shows a total of 12 images by default and takes three main parameters:
import matplotlib.pyplot as plt
def show_images(train_images,
class_names,
train_labels,
nb_samples = 12, nb_row = 4):
plt.figure(figsize=(12, 12))
for i in range(nb_samples):
plt.subplot(nb_row, nb_row, i + 1)
plt.xticks([])
plt.yticks([])
plt.grid(False)
plt.imshow(train_images[i], cmap=plt.cm.binary)
plt.xlabel(class_names[train_labels[i][0]])
plt.show()Now, we can call the function with the required parameters.
class_names = ['airplane', 'automobile', 'bird', 'cat', 'deer',
'dog', 'frog', 'horse', 'ship', 'truck']
show_images(train_images, class_names, train_labels)A successful execution of the previous code generates the images below.
Prior to training the model, we need to normalize the pixel values of the data in the same range (e.g. 0 to 1). This is a common preprocessing step when dealing with images to ensure scale invariance, and faster convergence during the training.
max_pixel_value = 255
train_images = train_images / max_pixel_value
test_images = test_images / max_pixel_valueAlso, we notice that the labels are represented in a categorical format like cat, horse, bird, and so one. We need to convert them into a numerical format so that they can be easily processed by the neural network.
from tensorflow.keras.utils import to_categorical
train_labels = to_categorical(train_labels, len(class_names))
test_labels = to_categorical(test_labels, len(class_names))The next step is to implement the architecture of the network based on the previous description.
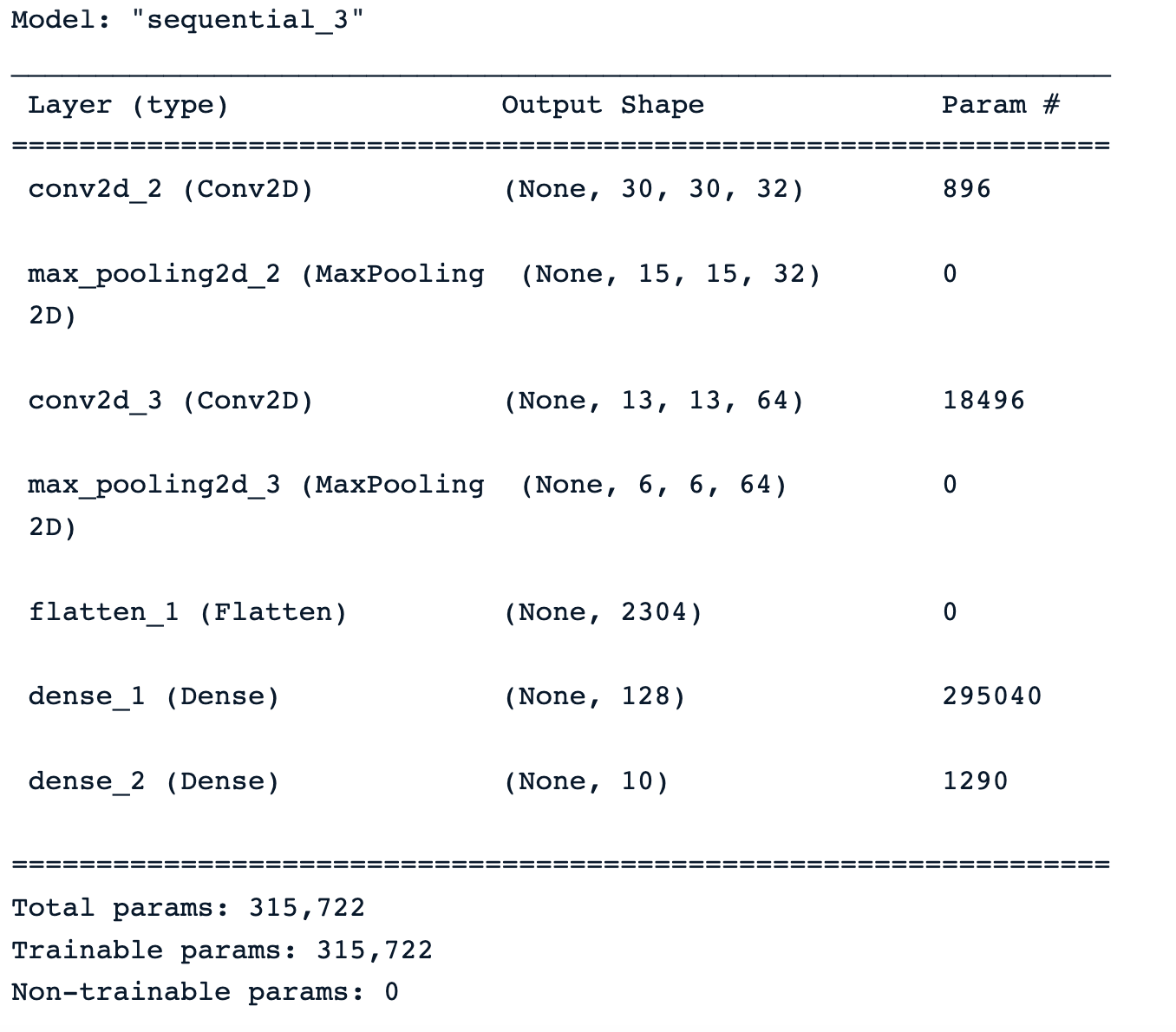
First, we define the model using the Sequential() class, and each layer is added to the model with the add() function.
from tensorflow.keras import Sequential
from tensorflow.keras.layers import Conv2D, MaxPooling2D, Flatten, Dense
# Variables
INPUT_SHAPE = (32, 32, 3)
FILTER1_SIZE = 32
FILTER2_SIZE = 64
FILTER_SHAPE = (3, 3)
POOL_SHAPE = (2, 2)
FULLY_CONNECT_NUM = 128
NUM_CLASSES = len(class_names)
# Model architecture implementation
model = Sequential()
model.add(Conv2D(FILTER1_SIZE, FILTER_SHAPE, activation='relu', input_shape=INPUT_SHAPE))
model.add(MaxPooling2D(POOL_SHAPE))
model.add(Conv2D(FILTER2_SIZE, FILTER_SHAPE, activation='relu'))
model.add(MaxPooling2D(POOL_SHAPE))
model.add(Flatten())
model.add(Dense(FULLY_CONNECT_NUM, activation='relu'))
model.add(Dense(NUM_CLASSES, activation='softmax'))After applying the summary() function to the model, we a comprehensive summary of the model’s architecture with information about each layer, its type, output shape and the total number of trainable parameters.
All the resources are finally available to configure and trigger the training of the model. This is done respectively with the compile() and fit() functions which takes the following parameters:
from tensorflow.keras.metrics import Precision, Recall
BATCH_SIZE = 32
EPOCHS = 30
METRICS = metrics=['accuracy',
Precision(name='precision'),
Recall(name='recall')]
model.compile(optimizer='adam',
loss='categorical_crossentropy',
metrics = METRICS)
# Train the model
training_history = model.fit(train_images, train_labels,
epochs=EPOCHS, batch_size=BATCH_SIZE,
validation_data=(test_images, test_labels))After the model training, we can compare its performance on both the training and testing datasets by plotting the above metrics using the show_performance_curve() helper function in two dimensions.
For better visualization, a vertical red line is drawn through the intersection of the training and validation performance values along with the optimal value.
def show_performance_curve(training_result, metric, metric_label):
train_perf = training_result.history[str(metric)]
validation_perf = training_result.history['val_'+str(metric)]
intersection_idx = np.argwhere(np.isclose(train_perf,
validation_perf, atol=1e-2)).flatten()[0]
intersection_value = train_perf[intersection_idx]
plt.plot(train_perf, label=metric_label)
plt.plot(validation_perf, label = 'val_'+str(metric))
plt.axvline(x=intersection_idx, color='r', linestyle='--', label='Intersection')
plt.annotate(f'Optimal Value: {intersection_value:.4f}',
xy=(intersection_idx, intersection_value),
xycoords='data',
fontsize=10,
color='green')
plt.xlabel('Epoch')
plt.ylabel(metric_label)
plt.legend(loc='lower right')Then, the function is applied for both the accuracy and the precision of the model.
show_performance_curve(training_history, 'accuracy', 'accuracy')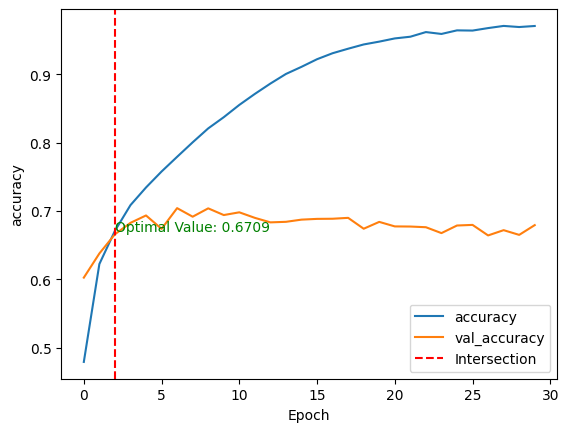
show_performance_curve(training_history, 'precision', 'precision')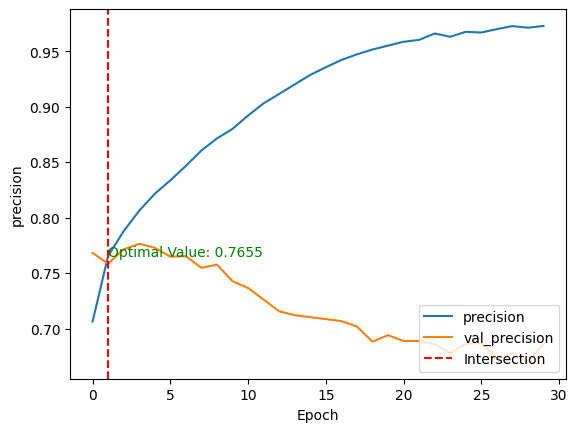
After training the model without any fine-tuning and pre-processing, we end up with:
These two metrics give a global understanding of the model behavior.
What if we want to know for each class which ones are the model good at predicting and those that the model struggles with?
This can be achieved from the confusion matrix, which shows for each class the number of correct and wrong predictions. The implementation is given below. We start by making predictions on the test data, then compute the confusion matrix and show the final result.
from sklearn.metrics import confusion_matrix, ConfusionMatrixDisplay
test_predictions = model.predict(test_images)
test_predicted_labels = np.argmax(test_predictions, axis=1)
test_true_labels = np.argmax(test_labels, axis=1)
cm = confusion_matrix(test_true_labels, test_predicted_labels)
cmd = ConfusionMatrixDisplay(confusion_matrix=cm)
cmd.plot(include_values=True, cmap='viridis', ax=None, xticks_rotation='horizontal')
plt.show()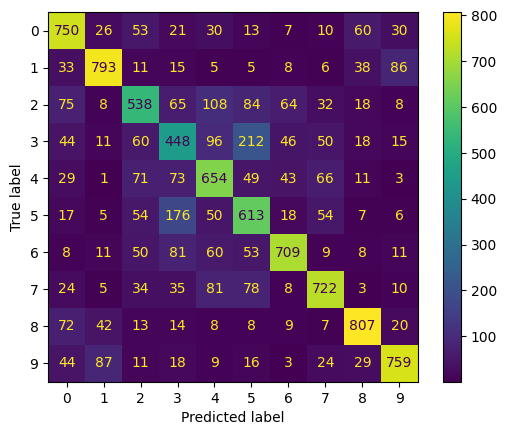
Learn more about confusion matrix from our tutorial understanding confusion matrix in R, which takes course material from DataCamp’s Machine Learning toolbox course.
This model can be improved with additional tasks such as:
This article has covered a complete overview of CNNs in TensorFlow, providing details about each layer of the CNNs architecture. Also, it made a brief introduction to TensorFlow and how it helps machine learning engineers and researchers build sophisticated neural networks.
We applied all these skill sets to a real-world scenario related to a multiclass classification task.
Our beginner’s guide to object detection could be a great next step to further your learning about computer vision. It explores the key components in object detection and explains how to implement in SSD and Faster RCNN available in Tensorflow.
Python Courses
Course
Course
Course
Tutorial
Javier Canales Luna
Tutorial
Aditya Sharma
Tutorial
Karlijn Willems
Tutorial
Zoumana Keita
Tutorial
Sayak Paul
Tutorial
Karlijn Willems