
Course
Introduction to Deep Learning with PyTorch
4 hr
85.7K
As machine learning technology advances at an unprecedented pace, Variational Autoencoders (VAEs) are revolutionizing the way we process and generate data. By merging powerful data encoding with innovative generative capabilities, VAEs offer transformative solutions to complex challenges in the field.
In this article, we'll explore the core concepts behind VAEs, their applications, and how they can be effectively implemented using PyTorch, step-by-step.
Autoencoders are a type of neural network designed to learn efficient data representations, primarily for the purpose of dimensionality reduction or feature learning.
Autoencoders consist of two main parts:
The primary objective of autoencoders is to minimize the difference between the input and the reconstructed output, thus learning a compact representation of the data.
Enter Variational Autoencoders (VAEs), which extend the capabilities of the traditional autoencoder framework by incorporating probabilistic elements into the encoding process.
While standard autoencoders map inputs to fixed latent representations, VAEs introduce a probabilistic approach where the encoder outputs a distribution over the latent space, typically modeled as a multivariate Gaussian. This allows VAEs to sample from this distribution during the decoding process, leading to the generation of new data instances.
The key innovation of VAEs lies in their ability to generate new, high-quality data by learning a structured, continuous latent space. This is particularly important for generative modeling, where the goal is not just to compress data but to create new data samples that resemble the original dataset.
VAEs have demonstrated significant effectiveness in tasks such as image synthesis, data denoising, and anomaly detection, making them relevant tools for advancing the capabilities of machine learning models and applications.
In this section, we will introduce the theoretical background and operational mechanics of VAEs, providing you with a solid base for exploring their applications in later sections.
Let’s start with encoders. The encoder is a neural network responsible for mapping input data to a latent space. Unlike traditional autoencoders that produce a fixed point in the latent space, the encoder in a VAE outputs parameters of a probability distribution—typically the mean and variance of a Gaussian distribution. This allows the VAE to model data uncertainty and variability effectively.
Another neural network called a decoder is used to reconstruct the original data from the latent space representation. Given a sample from the latent space distribution, the decoder aims to generate an output that closely resembles the original input data. This process allows the VAE to create new data instances by sampling from the learned distribution.
The latent space is a lower-dimensional, continuous space where the input data is encoded.
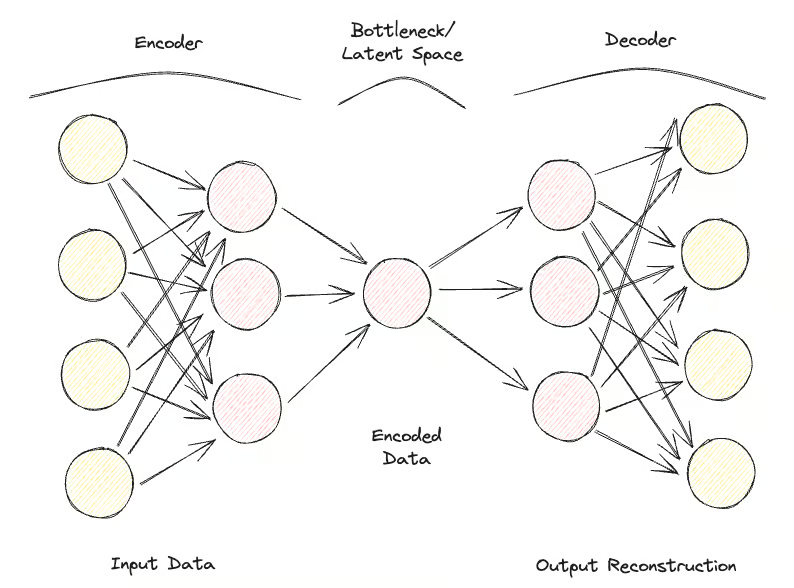
Visualization of the role of the encoder, decoder, and latent space. Image source.
The variational approach is a technique used to approximate complex probability distributions. In the context of VAEs, it involves approximating the true posterior distribution of latent variables given the data, which is often intractable.
The VAE learns an approximate posterior distribution. The goal is to make this approximation as close as possible to the true posterior.
Bayesian inference is a method of updating the probability estimate for a hypothesis as more evidence or information becomes available. In VAEs, Bayesian inference is used to estimate the distribution of latent variables.
By integrating prior knowledge (prior distribution) with the observed data (likelihood), VAEs adjust the latent space representation through the learned posterior distribution.
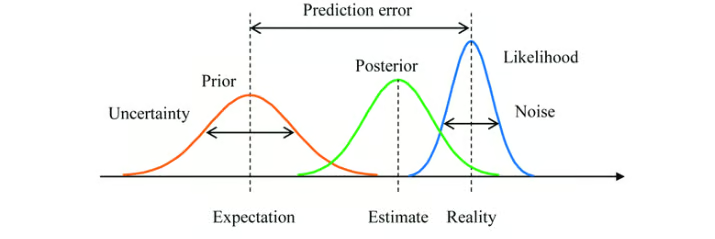
Bayesian inference with a prior distribution, posterior distribution, and likelihood function. Image source.
Here is how the process flow looks:
Let’s examine the differences and advantages of VAEs over traditional autoencoders.
As seen before, traditional autoencoders consist of an encoder network that maps the input data x to a fixed, lower-dimensional latent space representation z. This process is deterministic, meaning each input is encoded into a specific point in the latent space.
The decoder network then reconstructs the original data from this fixed latent representation, aiming to minimize the difference between the input and its reconstruction.
Traditional autoencoders' latent space is a compressed representation of the input data without any probabilistic modeling, which limits their ability to generate new, diverse data since they lack a mechanism to handle uncertainty.
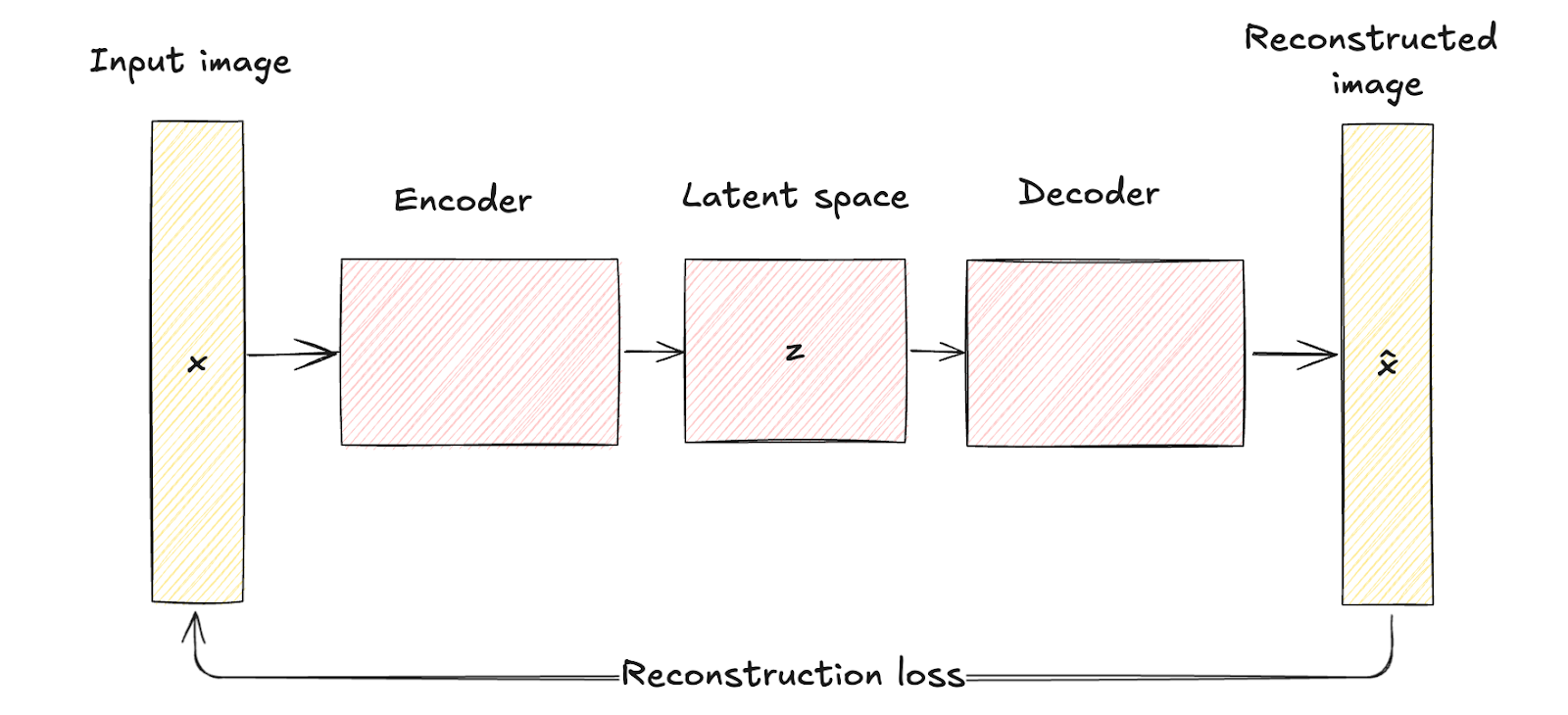
Autoencoder architecture. Image by author
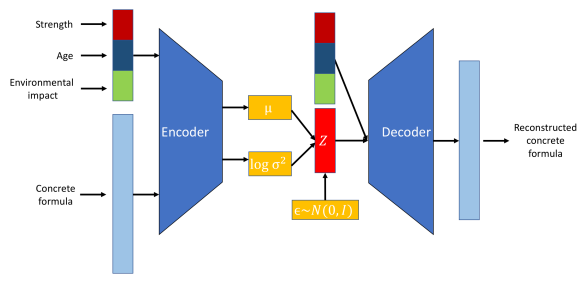
VAEs introduce a probabilistic element into the encoding process. Namely, the encoder in a VAE maps the input data to a probability distribution over the latent variables, typically modeled as a Gaussian distribution with mean μ and variance σ2.
This approach encodes each input into a distribution rather than a single point, adding a layer of variability and uncertainty.
Architectural differences are visually represented by the deterministic mapping in traditional autoencoders versus the probabilistic encoding and sampling in VAEs.
This structural difference highlights how VAEs incorporate regularization through a term known as KL divergence, shaping the latent space to be continuous and well-structured.
The regularization introduced significantly enhances the quality and coherence of the generated samples, surpassing the capabilities of traditional autoencoders.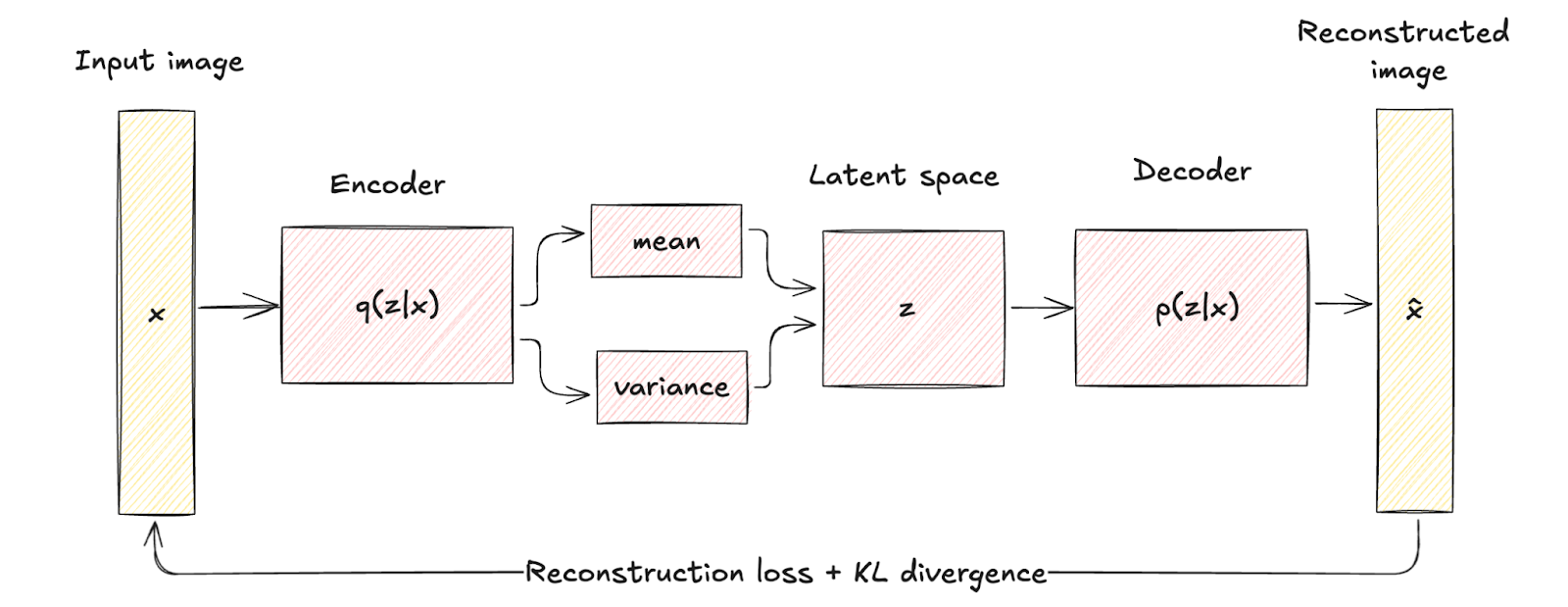
Variational Autoencoder architecture. Image by author
VAEs' probabilistic nature significantly expands their range of applications compared to that of traditional autoencoders. In contrast, traditional autoencoders are highly effective in applications where deterministic data representation is sufficient.
Let’s take a look at a few applications of each to better drive this point home.
VAEs have evolved into various specialized forms to address different challenges and applications in machine learning. In this section, we’ll examine the most prominent types, highlighting use cases, advantages, and limitations.
Conditional Variational Autoencoders (CVAEs) are a specialized form of VAEs that enhance the generative process by conditioning on additional information.
A VAE becomes conditional by incorporating additional information, denoted as c, into both the encoder and decoder networks. This conditioning information can be any relevant data, such as class labels, attributes, or other contextual data.
CVAE model structure. Image source.
Use cases of CVAEs include:
The pros and cons are:
Disentangled Variational Autoencoders, often called Beta-VAEs, are another type of specialized VAEs. They aim to learn latent representations where each dimension captures a distinct and interpretable factor of variation in the data. This is achieved by modifying the original VAE objective with a hyperparameter β that balances the reconstruction loss and the KL divergence term.
Pros and cons of Beta-VAEs:
Another variant of VAEs is Adversarial Autoencoders (AAEs). AAEs combine the VAE framework with adversarial training principles from Generative Adversarial Networks (GANs). An additional discriminator network ensures that the latent representations match a prior distribution, enhancing the model's generative capabilities.
Pros and cons of AAEs:
Now, we will look at two more extensions of Variational Autoencoders.
The first is Variational Recurrent Autoencoders (VRAEs). VRAEs extend the VAE framework to sequential data by incorporating recurrent neural networks (RNNs) into the encoder and decoder networks. This allows VRAEs to capture temporal dependencies and model sequential patterns.
Pros and cons of VRAEs:
The last variant we will examine is Hierarchical Variational Autoencoders (HVAEs). HVAEs introduce multiple layers of latent variables arranged in a hierarchical structure, which allows the model to capture more complex dependencies and abstractions in the data.
Pros and cons of HVAEs:
In this section, we will implement a simple Variational Autoencoder (VAE) using PyTorch.
To implement a VAE, we need to set up our Python environment with the necessary libraries and tools. The libraries we will use are:
Here’s the code to install these libraries:
pip install torch torchvision matplotlib numpyLet's walk through the implementation of a VAE step-by-step. First, we must import the libraries:
import torch
import torch.nn as nn
import torch.optim as optim
from torchvision import datasets, transforms
from torch.utils.data import DataLoader
import matplotlib.pyplot as plt
import numpy as npNext, we must define the encoder, decoder, and VAE. Here’s the code:
class Encoder(nn.Module):
def __init__(self, input_dim, hidden_dim, latent_dim):
super(Encoder, self).__init__()
self.fc1 = nn.Linear(input_dim, hidden_dim)
self.fc_mu = nn.Linear(hidden_dim, latent_dim)
self.fc_logvar = nn.Linear(hidden_dim, latent_dim)
def forward(self, x):
h = torch.relu(self.fc1(x))
mu = self.fc_mu(h)
logvar = self.fc_logvar(h)
return mu, logvar
class Decoder(nn.Module):
def __init__(self, latent_dim, hidden_dim, output_dim):
super(Decoder, self).__init__()
self.fc1 = nn.Linear(latent_dim, hidden_dim)
self.fc2 = nn.Linear(hidden_dim, output_dim)
def forward(self, z):
h = torch.relu(self.fc1(z))
x_hat = torch.sigmoid(self.fc2(h))
return x_hat
class VAE(nn.Module):
def __init__(self, input_dim, hidden_dim, latent_dim):
super(VAE, self).__init__()
self.encoder = Encoder(input_dim, hidden_dim, latent_dim)
self.decoder = Decoder(latent_dim, hidden_dim, input_dim)
def forward(self, x):
mu, logvar = self.encoder(x)
std = torch.exp(0.5 * logvar)
eps = torch.randn_like(std)
z = mu + eps * std
x_hat = self.decoder(z)
return x_hat, mu, logvarWe also have to define the loss function. The loss function for VAEs consists of a reconstruction loss and a KL divergence loss. This is how it looks in PyTorch:
def loss_function(x, x_hat, mu, logvar):
BCE = nn.functional.binary_cross_entropy(x_hat, x, reduction='sum')
KLD = -0.5 * torch.sum(1 + logvar - mu.pow(2) - logvar.exp())
return BCE + KLDTo train the VAE, we will load the MNIST dataset, define the optimizer, and train the model.
# Hyperparameters
input_dim = 784
hidden_dim = 400
latent_dim = 20
lr = 1e-3
batch_size = 128
epochs = 10
# Data loader
transform = transforms.Compose([transforms.ToTensor(), transforms.Lambda(lambda x: x.view(-1))])
train_dataset = datasets.MNIST(root='./data', train=True, transform=transform, download=True)
train_loader = DataLoader(train_dataset, batch_size=batch_size, shuffle=True)
# Model, optimizer
vae = VAE(input_dim, hidden_dim, latent_dim)
optimizer = optim.Adam(vae.parameters(), lr=lr)
# Training loop
vae.train()
for epoch in range(epochs):
train_loss = 0
for x, _ in train_loader:
x = x.view(-1, input_dim)
optimizer.zero_grad()
x_hat, mu, logvar = vae(x)
loss = loss_function(x, x_hat, mu, logvar)
loss.backward()
train_loss += loss.item()
optimizer.step()
print(f"Epoch {epoch + 1}, Loss: {train_loss / len(train_loader.dataset)}")After training, we can evaluate the VAE by visualizing the reconstructed outputs and generated samples.
This is the code:
# visualizing reconstructed outputs
vae.eval()
with torch.no_grad():
x, _ = next(iter(train_loader))
x = x.view(-1, input_dim)
x_hat, _, _ = vae(x)
x = x.view(-1, 28, 28)
x_hat = x_hat.view(-1, 28, 28)
fig, axs = plt.subplots(2, 10, figsize=(15, 3))
for i in range(10):
axs[0, i].imshow(x[i].cpu().numpy(), cmap='gray')
axs[1, i].imshow(x_hat[i].cpu().numpy(), cmap='gray')
axs[0, i].axis('off')
axs[1, i].axis('off')
plt.show()
#visualizing generated samples
with torch.no_grad():
z = torch.randn(10, latent_dim)
sample = vae.decoder(z)
sample = sample.view(-1, 28, 28)
fig, axs = plt.subplots(1, 10, figsize=(15, 3))
for i in range(10):
axs[i].imshow(sample[i].cpu().numpy(), cmap='gray')
axs[i].axis('off')
plt.show()
Visualization of outputs. The top row is the original MNIST data, the middle row is the reconstructed outputs, and the last row is the generated samples—image by author.
While Variational Autoencoders (VAEs) are powerful tools for generative modeling, they come with several challenges and limitations that can affect their performance. Let’s discuss some of them, and provide mitigation strategies.
This is a phenomenon where the VAE fails to capture the full diversity of the data distribution. The result is generated samples representing only a few modes (distinct regions) of the data distribution while ignoring others. This leads to a lack of variety in the generated outputs.
Mode collapse caused by:
Mode collapse can be mitigated by using:
In some cases, the latent space learned by a VAE might become uninformative, where the model does not effectively use the latent variables to capture meaningful features of the input data. This can result in poor quality of generated samples and reconstructions.
This typically happens because of the following reasons:
Uninformative latent spaces can be fixed by leveraging the warm-up strategy, which involves gradually increasing the weight of the KL divergence during training or by directly modifying the weight of the KL divergence term in the loss function.
Training VAEs can sometimes be unstable, with the loss function oscillating or diverging. This can make it difficult to achieve convergence and obtain a well-trained model.
The reason this occurs is because:
Steps to mitigate training instability involve either using:
Training VAEs, especially with large and complex datasets, can be computationally expensive. This is due to the need for sampling and backpropagation through stochastic layers.
The cause of high computational costs include:
These are some mitigation actions:
Variational Autoencoders (VAEs) have proven to be a groundbreaking advancement in the realm of machine learning and data generation.
By introducing probabilistic elements into the traditional autoencoder framework, VAEs enable the generation of new, high-quality data and provide a more structured and continuous latent space. This unique capability has opened up a wide array of applications, from generative modeling and anomaly detection to data imputation and semi-supervised learning.
In this article, we’ve covered the fundamentals of Variational Autoencoders, the different types, how to implement VAEs in PyTorch, as well as challenges and solutions when working with with VAEs.
Check out these resources to continue your learning:
Learn how to work with LLMs in Python right in your browser
Learn more about AI with these courses!
Course
Course
Course
blog
Abid Ali Awan
11 min
Tutorial
Pier Paolo Ippolito
Tutorial
Aditya Sharma
Tutorial
Josep Ferrer
Tutorial
DataCamp Team
Tutorial
Vaibhav Mehra

